stle7
advertisement

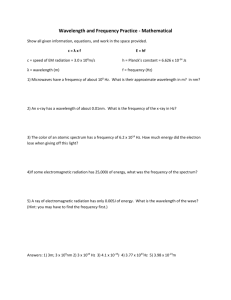
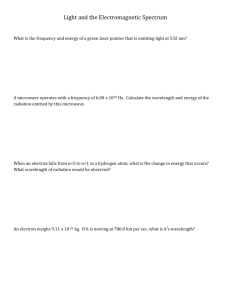
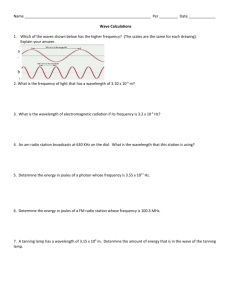
A Two-Wavelength Model of Surface Flattening in Cold Metal Rolling with Mixed Lubrication HR Le and MPF Sutcliffe Cambridge University Engineering Department, Trumpington Street, Cambridge, CB2 1PZ, U.K. Huirong - please search for the ?? comments Abstract A new model of surface flattening is developed for cold metal rolling in the mixed regime Longitudinal surface roughness is modelled by two separate wavelengths. The new model follows the asperity crushing analysis of Sutcliffe for unlubricated rolling (Sutcliffe, 1999) but additionally includes a hydrodynamic model to account for the effect of the lubricant. The effect of various parameters including speed, reduction in strip thickness, roughness wavelength and lubricant properties is examined. The results show similar behaviour to previous models of mixed lubrication, with a speed parameter s having the most influence, and confirm the results for unlubricated rolling that the short wavelength components of the surface roughness persist more than the long wavelength components. The predicted changes in roughness are in good agreement with experiments. Keywords: asperity, friction, hydrodynamic, lubrication, metal rolling, mixed regime, roughness. Submitted for presentation at the 1999 STLE/ASME International Tribology Conference, February 1999. 1 List of Figures 1 Schematic of the metal rolling process 2 Cross-section of the contact geometry between a smooth roll and rough strip with a two-wavelength surface roughness. The rolling direction is out of the plane of the Figure. (a) When roll and strip first make contact (d = 0). (b) After some asperity flattening. 3 Plan view of the geometry of the contact patch between a smooth roll and rough strip with a two-wavelength surface roughness. 4 The effect of reduction and speed parameter s on the surface roughness amplitudes 0 and 0 for long and short wavelength roughness, 0 / 0 3, L / 10, t1 / L 16.4, Y 4.70, r 25% and 50% . 5 The effect of Y and speed parameter s on the surface roughness amplitudes 0 and 0 for long and short wavelength roughness, 0 / 0 3, L / 10, t1 / L 16.4, Y 4.70 6.42, r 25% . 6 The effect of t1 / L and speed parameter s on the surface roughness amplitudes 0 and 0 for long and short wavelength roughness, 0 / 0 3, L / 10, t1 / L 8.2 16.4, Y 4.70, r 25% . 7 Comparison of the surface roughness amplitudes by models and measurements for r = 25 %, 0 / 0 3, L / 10, t1 / L 16.4, Y 4.70 . 8 Comparison of measured and theoretical models of the change in surface roughness amplitudes for r = 50 %, 0 / 0 3, L / 10, t1 / L 16.4, Y 4.70 . 9 Regime map; 0 / 0 3, L / 10, t1 / L 16.4,Y 4.70 . 2 Nomenclature ??Check these carefully please - are others needed - leave out very minor notation) A(a) Fraction of contact area for long (short) wavelength roughness components Hs Wilson and Walowit, smooth film thickness Ht Mean film thickness, averaged across the width of the contact H* Constant in Reynolds’ equation L () Long (short) wavelength P(P ) (Mean) interface pressure, averaged over the short wavelength Pp ( Pv ) Pressure on the asperity tops (in the valleys) for the long wavelength roughness component pp Pressure on the asperity tops for the short wavelength roughness component pv Pressure in the valleys for the short wavelength roughness component, (equal to the lubricant pressure). q Reduced hydrodynamic pressure, q 1 exp( pv ) r Reduction in thickness R Roll radius t, t1, t2 Strip thickness; 1 – inlet, 2 – exit. U U U r U s 2 , mean entraining velocity UR, US Roll and strip speed WL ( w ) Flattening rate of long (short) wavelength component x, y Coordinates in rolling direction and transverse directions Y Plane strain yield strength of the strip Z 0 (z0) Initial peak-to-peak amplitude of long (short) wavelength ( 0 ) (Initial) depth of short wavelength valleys. Bulk strain rate of underlying strip 0 Viscosity of lubricant at ambient pressure Viscosity of lubricant s H s t 0 , speed parameter 3 ( 0 ) (Initial) r.m.s. amplitude of short wavelength asperities , ( 0 ) (Initial) r.m.s. amplitude of long wavelength asperities t0 Initial combined strip and roll r.m.s. roughness 4 1. Introduction Cold rolling is a well-established metal forming process. However it remains an important area of research since incremental improvements in understanding can have significant economic impact on account of the large tonnage of metal rolled. Particular attention has been paid recently to modelling friction and surface finish. In most metal rolling processes, lubricants are applied between the roll and strip. Apart from the cooling role of the lubricant, this has two main advantages. Firstly, the shear stress of the lubricant is generally smaller than that of the work piece itself, hence reducing friction and consequently the rolling load. Secondly, the roll and the strip can be separated either by the lubricant in asperity valleys or by a boundary film, limiting damage to the roll and work piece surfaces. The surface quality of the rolled strip is closely related to the amount of oil drawn into the bite and the corresponding lubrication regime. Wilson and Walowit derive an expression for the 'smooth' oil film thickness Hs as Hs 60U 1 exp Y (1) where U U r U s 2 is the average entraining velocity, is the inlet angle between the strip and roll, Y is the plain strain yield strength of the strip and 0 is the viscosity of the lubricant at ambient pressure. is the pressure viscosity coefficient in the Barus equation 0 exp(p) used to describe the variation of viscosity with pressure p. The ratio s H s t 0 of the smooth film thickness Hs to the combined roll and initial strip roughness t0 is used to characterise the lubrication regime. In the thick-film lubrication regime with s > 3, the lubricant film is thick enough to keep the two surfaces apart. In this regime, hydrodynamic pits develop on the surface, either due to the unconstrained deformation of different grains, or due to hydrodynamic instabilities [Wilson, 1977 and Schey, 1983]. The resulting poor surface quality is unacceptable for most products. To achieve an appropriate surface finish, rolling typically operates in the mixed lubrication regime with s < 1. In this regime, asperities on the strip surface are flattened and conform to the bright surface finish of the rolls. The contact can be split into valley regions filled with pressurised 5 oil, and 'contact' regions, where the strip and roll are in close proximity. The area of contact ratio a is important in estimating friction. Several models have been developed recently to model mixed lubrication. Relevant modelling issues are discussed below. (i) Some assumptions are needed about the nature of the roughness. The simplest models assume a deterministic roughness, for example of triangular ridges. This can be refined by using asperities with a Gaussian profile [Christensen, 1970]. In many rolling processes, the roll grinding process ensures that the roll surface has a pronounced lay, with asperities running along the rolling direction. This longitudinal roughness is in turn transferred to the strip. As well as longitudinal roughness, The roughness transverse or isotropic roughness orientations have also been considered. (ii) A hydrodynamic model is needed to predict the change in oil pressure through the bite. Generally, it is adequate to model the lubricant as Newtonian. Exceptions to this may arise when oil films are very thin. The effect of roughness on the pressure gradients in the oil is generally included by an average Reynolds' equation [Baglin, 1986, Cheng averaged flow equation??]; details depend on the roughness geometry assumed. (iii) A model of the asperity crushing behaviour is needed. Here it is essential to include the effect of bulk deformation on the asperity crushing behaviour to model the tribology accurately [Sutcliffe, 1988,Wilson and Sheu, 1988, Korzekwa, et. al, 1992]. (iv) The mechanics of metal rolling, including plasticity of the bulk material, need to be related to a tribological model. Two approaches have been used here. Either an inlet analysis can be used [Sutcliffe and Johnson, 1990], in which it is assumed that the tribology of the contact is determined in a short inlet region. Alternatively, the plasticity and tribological components are modelled through the bite [Sheu and Wilson, 1994, Lin et. al., 1998]. Marsault adopts this approach, also including limited roll elasticity [Marsault, 1998]. (v) Friction is normally modelled by assuming constant friction coefficients b and v for the areas of contact and valley regions respectively. A mean friction coefficient is then found by summing the contribution from these two components ba v 1 a 6 (2) Results of the various models are in broad agreement, showing that the film thickness depends primarily on the rolling speed, oil properties and inlet geometry [Sutcliffe and Johnson, 1990a, ?? add all decent mixed lubrication modelling references including Wilson et al and Marsault et al]. The effects of yield stress, strip thickness, asperity geometry and entry tension are of secondary importance. Experimental measurements of changes in film thickness are generally in good agreement with theoretical predictions [Sutcliffe and Johnson, 1990b, Wilson and Sheu ??date]. However Tabary et al [Tabary et. al, 1996] showed that experimental measurements of friction when cold rolling aluminium could not be easily reconciled with existing models of the mixed regime. This conclusion was supported by the work of Marsault [Marsault, 1998]. Tabary et al suggested that the common simplification made in existing models, that the roughness could be modelled by a single wavelength, led to significant errors in estimating the area of contact ratio. This conclusion was confirmed by Sutcliffe [Sutcliffe, 1999] who investigated this effect both theoretical and experimental for unlubricated rolling. Surface roughness was modelled by twowavelengths, with short wavelength components superimposed on long wavelength components. Theory showed that the contact area of the surfaces is much reduced by the introduction of the short wavelength component (in this case with wavelengths less than about 10 µm). Predictions of the change in roughness amplitude showed good agreement with experiments. It is inferred that short wavelength components persist more than the long wavelength and must be considered when estimating contact area and hence friction in metal rolling. Recent measurements of surface roughness in mixed lubrication [Sutcliffe and Le, 1999] were interpreted in terms of this two wavelength model and showed that the friction coefficient correlates well with the amplitude of the short wavelength components. The recent work suggests that using the two-wavelength approach may close up the discrepancy in friction between experiments and theory. The aim of this paper is to incorporate hydrodynamic theory into the unlubricated two-wavelength model of Sutcliffe [Sutcliffe, 1999] to investigate surface modification in the mixed regime. Section 2 briefly reviews the asperity modelling of Sutcliffe and describes the hydrodynamic theory used in the analysis. Model predictions are presented in section 3 and compared with reported experiments in section 4. 7 2. Theoretical model 2.1. Overview Figure 1 shows a schematic of the rolling process, in which strip is reduced in thickness from t1 to t2 as it passes through rolls of radius R. The inlet angle between the roll and strip, where the strip first contacts the roll, is derived from the geometry as t1r R , where r is the reduction in strip thickness. The strip material is taken as ideally plastic. The roll bite is divided into three zones: an inlet zone, a transition zone and a work zone. In the inlet zone there is deformation of the asperity tops but no bulk deformation in the underlying material. In the short transition zone, bulk deformation takes place and the asperity geometry and lubricant pressure change rapidly. In the work zone, there is further bulk plasticity, but the changes in tribological conditions are relatively slow, arising only from the change in film thickness associated with elongation of the strip surface. In this paper it is assumed that the inlet and transition zones are short compared to the roll radius, so that the roll shape can be taken as straight in these regions with a slope . This assumption, which is discussed in section 3.3, will be appropriate for many metal rolling processes. The strip surface is modelled by longitudinal roughness with two wavelength components, while the roll surface is taken as smooth. The short wavelength component is superimposed on the long wavelength components, as illustrated in Fig. 2. This Figure shows a section through the strip, with the rolling direction out of the plane of the figure. With the assumed longitudinal roughness, contact occurs between the two surfaces in the form of a series of long thin contacts separated by valleys, as sketched in Fig. 3. The shaded areas depict the close contact regions and the blank areas identify the valleys. The model for the asperity geometry and crushing behaviour is that described by Sutcliffe for unlubricated rolling. Only an outline of this part of the model will be given in section 2.4; further details are described in [Sutcliffe, 1999]. However, in contrast to that work, the variation of hydrodynamic pressure in the oil is included in this paper, as detailed in section 2.3. 2.2. Asperity Geometry Figure 3 illustrates the asperity geometry. Although this figure shows asperities with a triangular profile for simplicity, in fact a pseudo-Gaussian profile described by Sutcliffe [Sutcliffe, 1999] is used for both the long and short wavelength components. 8 The initial geometry for the long and short wavelengths L and is described by peakto-peak heights Z0 and z0, respectively, and corresponding r.m.s. amplitudes 0 and . The distance between the strip and roll surfaces is defined by the nominal overlap distance d between these surfaces. This equals zero when the two surfaces first touch, Fig. 2a, and is positive when there is asperity contact, Fig. 2b. The variation of valley depth across the width of the contact is described by , which is a function of the transverse coordinate y. 0 denotes the valley depth when first contact between the surfaces occurs, with d = 0. As the surfaces come into contact the asperity geometry is modified. The variances of the short and long wavelength components 2 and 2 are derived from the distribution of valley heights as described by Sutcliffe [Sutcliffe, 1999]. The total variance is given by t2 2 2 . Similarly the area of contact ratio a for each contact can be found from . The mean film thickness H t is found by averaging the film thickness variation across the width of the contact (including areas of contact). With a rough roll, the model described here still applies, but the amplitude of the strip surface roughness should be understood to include the roll roughness. 2.3. Hydrodynamic pressure An averaged Reynolds’ equation [Baglin, 1983] is used to derive the variation of hydrodynamic pressure in the rolling direction both in the inlet and transition zones: d q H H* 120U 3 t 2 dx H t 1 3t / H t2 (3) where the reduced pressure q of the lubricant is related to the pressure in the valleys pv by q 1 exp( pv ) and H t is the mean film thickness ??Does Ht average the thickness including the contacts, where h = 0, and is this the correct thing to use in the above formula??. H * is a constant that must be found from the boundary conditions, being the oil film towards the middle of the bite where the pressure gradient is zero. The effect of roughness on the oil flow is described by the term in (3) containing t2 2 2 , the total variance of the surface roughness. It is assumed that the valley pressure pv is uniform across the contact. An alternative scheme, in which the pressure variation in each isolated valley was considered separately (c.f. Fig. 3) was found not to predict roughness changes satisfactorily. The assumption of uniform pressure in the transverse direction is clearly reasonable when 9 valleys are not cut off by intervening contact areas, but is less easy to justify where there is contact. Two factors suggest why this approach might be appropriate. Firstly a two dimensional hydrodynamic analysis by Sutcliffe [Sutcliffe, 1989] showed that, even under areas of close contact, a lubricant film may be present, acting as a route for transverse oil flow and pressure equalisation between the valleys. Secondly, real roughness is not entirely longitudinal; transverse troughs exist which can facilitate oil side leakage. 2.4. Asperity crushing 2.4.1 Inlet region In the inlet region before there is asperity contact, the mean film thickness is given by H t d Z 0 2 . The origin for the x ordinate is taken when the surfaces first contact, with the overlap distance d = 0, so that the assumption that the inlet is straight gives d x (4) ?? or is a circular arc used for this part?? The strip and the roll come into contact for x > 0. It is assumed that the asperities are crushed in the inlet region as if the overlapping material is removed. Therefore the depth of each valley can be derived in terms of the overlap distance d as 0 d (5) The difference between the pressure p p on the asperity tops and the pressure in the valleys pv is equal to the hardness of the asperities; p p pv 2.57Y (6) A pressure distribution P, which averages out variations on the short wavelength scale, is given by P p pa pv (1 a) (7) where a is the contact area ratio for each small wavelength asperity. The average pressure P is given from the average of the pressure distribution P across the width of the contact. 2.4.2. Transition region 10 Bulk plastic deformation of the underlying material takes place in the transition region. This plasticity considerably increases the ease with which asperities can be crushed, as the non-uniform velocity field at the surface associated with asperity crushing can be accommodated by local perturbations of the plastic substrate. It is essential to include this effect to model the tribology of metal forming accurately. The asperity crushing model used in this work is identical to that used by Sutcliffe (1999). Only a summary is given here. The crushing process is split into two scales. The surface velocities due to crushing of the short wavelength asperities is superimposed on the velocities associated with flattening on the long wavelength scale. On the scale of the short wavelength, a local flattening rate w describes in dimensionless form the velocity difference between the asperity tops and adjacent valleys (vp – vv). This is related to the difference in pressure between the asperity tops and valleys (pp – pv) using the results of Korzekwa et al [Korzekwa et al, 1992] for an infinite array of asperities: w 2 vv v p W p, a (8) p p p p v / Y Here is the strain rate in the underlying material, which is found from the geometry of the rolls ??do you neglect the effect of surface roughness on thickness??. The function W is described by a curve fit to the results of Korzekwa et al (Sutcliffe, 1999). A similar approach is used to describe the crushing of the long wavelength asperities. The division between a valley and a peak for the long wavelength component is made at the point where the smoothed pressure distribution P equals the mean pressure P . This also defines the area of contact ratio A. Valley and peak pressures Pv and Pp are found by averaging the pressure P over the corresponding length. An associated crushing rate WL is again given by the analysis of Korzekwa et al WL 2Vv V p L P 11 Pp Pv Y W P, A (9) where Vv and V p are valley and peak velocities associated with the long wavelength. The velocity distribution associated with the long wavelength is superimposed on the velocity distribution for the short wavelength. Finally the short and long wavelength crushing rates are related by considering conservation of volume 2.4.3. Work Zone The gradients of mean pressure P and hydrodynamic pressure pv are small in the work zone compared with those in the inlet and transition zones. However, the surface roughness on the strip is further flattened due to the elongation of the strip. This is taken into account by considered volume conservation of the lubricant. Neglecting the gradient of hydrodynamic pressure, the oil flow rate is approximated by the Couette term U H t constant (10) where U U s U R 2 . The strip velocity is given by the volume conservation of for the strip U s t constant , with the variation in strip thickness t through the bite derived from the geometry of the rolls in the bite. By assuming that the roughness profile stays the same shape, but reduces in height in proportion to the change in Ht, the change in roughness amplitudes and can be calculated through the bite. ??Is this right?? 2.5. Solution method Far from the inlet to the bite we have the boundary condition x , pv q 0 . The hydrodynamic pressure in the inlet region is given by integrating equation 3 using a trapezoidal method, taking the variation in valley depth described in section 2.4.1. The asperity geometry details (section 2.2) are used to calculate the relevant asperity parameters from the distribution of valley depths, and hence the corresponding pressure distribution across the bite via equation 7. The end of the inlet region is reached when bulk yielding occurs with P Y T (11) where T is the unwind tension stress. In the transition region, bulk deformation occurs and the hydrodynamic pressure (equation 3) and the asperity crushing equations (section 2.4.2) are coupled. 12 Following the method described by Sutcliffe (1999), the contact is represented by n short-wavelength asperities (typically n = 10) spanning half of a long wavelength asperity. The roughness profile is defined by the depths i of these small wavelength asperities. Symmetry conditions are used at the edges of the contact. The dependence of the n+1 independent variables (including the valley pressure pv) can be described in functional form by d i f i 1 , 2 ,, n , pv dx (12) The exact form of equation 12 is derived from the governing equations given in section 2.4.2, as detailed by Sutcliffe (Sutcliffe, 1999). These equations plus the Reynolds’ equation form a set of n+1 simultaneous differential equations that are integrated simultaneously by a 2nd/3rd order Runge-Kutta method up to the end of the transition zone. It is assumed that the gradient of the hydrodynamic pressure approaches zero at the end of the transition zone, i.e. dq dx 0 . This assumption is good in a 'high-speed' regime where hydrodynamic pressure build up is confined to short inlet and transition zones. However, it is no longer good when the speed is 'slow' [add references here Wilson et al??]. The validity of this assumption and delineation of the high and low speed regimes is discussed in Section 4. The unknown constant H* in Reynolds’ is found from the boundary condition at the end of the transition zone. The pressure and geometry distribution is integrated through the bite using an initial guess for H*, which is then updated until this boundary condition is satisfied. Finally the variation of film thickness and roughness geometry through the work zone is given by the results of section 2.4.3. 3. Theoretical results In this section, the effect of speed parameter s , reduction in strip thickness, pressure viscosity coefficient and the wavelength of the surface roughness are investigated. In section 3.3 the validity of the new model is discussed. As with the unlubricated rolling results of Sutcliffe, the ratio of initial roughness wavelengths L/ is fixed at 10. 13 The ratio of initial roughness amplitudes 0 0 is taken as 3, as suggested by Sutcliffe. As a baseline case, values of t1 L and Y are taken as 16.4 and 4.7, representing the experimental conditions described in section 4, with 0.8 mm thick aluminium strip. The sensitivity to this choice is explored. 3.1. Effect of speed parameter s and reduction Figure 4 shows the effect of speed parameter s on the change in short and long wavelength amplitudes and at strip reductions of 25 and 50 percent. The roughness amplitudes are normalised by their initial values. s H s t 0 is the ratio of the smooth film thickness (equation 1) to the strip initial r.m.s. roughness. The effect of changes in s is significant, as per previous one-wavelength models[Sutcliffe and Johnson, 1990a, Wilson and Sheu, ??]. As s falls significantly below one, the amount of oil drawn in to the bite falls and the roughness is crushed, with 0 and 0 falling below the initial value of one. The effect of reduction is relatively minor. Figure 4 confirms the results of the unlubricated rolling analysis, that short wavelengths persist more than long wavelengths. For typical rough surfaces, the short wavelengths will be of the order of 10's of micrometres. Even for s equal to 0.01, where one-wavelength models would predict very little residual roughness on the strip, Fig. 4 shows that a significant contribution from these short wavelengths remain. 3.2. Effect of Y and t1 / L Figure 5 shows that the influence of Y is insignificant. The effect of roughness wavelength group t1 / L on the asperity crushing behaviour is illustrated in Fig. 6, where this parameter is varied by a factor of 2. Again the effect is relatively minor. However for thinner aluminium foil, where t1 / L might fall to as low as 0.1, changes due to this parameter could become apparent. However, a more sophisticated rolling model including roll elasticity (c.f. Marsault, 1998), would be needed to explore this regime adequately. 3.3. Validity of two-wavelength model 14 The model addresses mixed lubrication in the 'high-speed' regime, where the predominant changes in surface roughness happen in the inlet and transition regions. The extent of validity of the model is defined by two effects. At a sufficiently high speed, the hydrodynamic pressure does reaches the yield stress before the strip and roll and roll come into contact, so that a mixed lubrication model is not needed. An inlet zone calculation, taking into account the effect of roughness on the hydrodynamic pressure build-up (equation 3), will be adequate in these conditions. On the other hand, at sufficiently low speed, it is no longer adequate to neglect the Pouiseuille flow term in the work zone (c.f. equation 10). In these circumstances the significant changes in lubricant pressure and asperity geometry are not confined to a short inlet and transition region. The limit of applicability of the current model is arbitrarily drawn when the inlet and transition zone extends through 10 percent of the roll bite. These two limits are shown in Fig. 9, which gives a regime map. The portion of the bite which dominates the tribology of the contact (inlet, transition or work zone) depends primarily on the speed parameter s , but is also dependent on the strip reduction. 4. Comparison with experiments I still need to look at this section In this section experimental results described in a previous paper [Sutcliffe and Le, 1999] are compared with the theoretical predictions. Experimental details are summarised here; further details are given in the above reference. Cold-rolled workhardened 5052 aluminium strips of thickness 0.82 mm, length 200 mm and width 50 mm were rolled in a two-high mill with roll diameters of 51 mm at roll speeds between 0.003 and 1.0 m/s. Before rolling, the strips had an estimated yield strength Y of 214 MPa. Nominal reductions of 25 and 50%, were used. Three naphthenic base oils were liberally applied to both sides of the strip. These oils had viscosities of 0.04, 0.27 and 1.44 Pas at a typical rolling temperature of 25°C. Pressure viscosity coefficients were estimated as being 2.2, 2.2 and 3.0×10–8 m2/N respectively. The method described in detail by Sutcliffe (1999) was used to divide the spectrum into long and short wavelength components. Contributions for wavelengths below an arbitrary wavelength are summed up to give the amplitude of a short wavelength components , while wavelengths between this arbitrary breakpoint wavelength and 15 an upper cut-off are summed to estimate a long wavelength amplitude . In this case, we choose to divide the spectrum between short and long wavelengths at 14 m, with an upper cut-off wavelength of 250m. The division was made at this point in order that the ratio of initial r.m.s. amplitudes of the short and long wavelength components of strip roughness 0 and 0 were in the ratio 1:3, being in this case 0.12 and 0.36 m respectively. The corresponding values for the roll, r and r, were 0.024 and 0.048µm, giving a total combined roughness t 0 02 02 r2 2r for the initial strip and roll surfaces equal to 0.38 m. The long and short wavelengths of the short wavelength and long wavelength components were estimated to be 5 and 50 µm respectively from Gaussian distribution. ?? How was this done, and how does it relate to the 14µm quoted above?? The surface roughness amplitudes at a reduction of 25% predicted by the model and the experiment results are shown in Fig. 7. The agreement is reasonably good. However, the discrepancy enlarges at a reduction of 50% as shown in Fig. 8. It seems that other secondary flattening mechanisms such as burnishing of hydrodynamic pockets on the initial surface may be important at higher reduction. Experiments of oil pits under intimate contact [Lo, et. al., 1998] showed that the burnishing of the oil pits increases with the sliding velocity and sliding distance. This effect may be profound at high reduction due to the increase in sliding velocity and sliding distance. Further investigation of these secondary mechanisms is necessary to close up the discrepancy. 5.Conclusions A two-wavelength model of surface flattening has been developed for cold metal rolling. The mixed lubrication regime is considered, where there is both asperity contact and significant hydrodynamic pressure in the lubricant. Recent work (Sutcliffe, 1999) for unlubricated rolling has shown that the inclusion of different wavelengths of roughness can have a significant influence on the area of contact ratio between strip and roll surfaces, and consequently on friction estimates. This effect is explored for lubricated rolling. The surface roughness is modelled as two wavelengths of longitudinal roughness, with a short wavelength component superimposed on a long wavelength component. It is assumed that the most significant changes in 16 asperity geometry occur in short inlet and transition zones. In the work zone the change in surface roughness is modelled by considering volume continuity for the oil. A numerical scheme is developed to solve the simultaneous hydrodynamic and asperity crushing equations. The results confirm the observation for unlubricated rolling that the long wavelength component crushes faster than the short wavelength component. As with previous mixed lubrication models, the crushing behaviour is most sensitive to the speed parameter s . For the range of values t1 / L considered, there was little change in crushing behaviour; however there may be differences for the much smaller values of t1 / L found in thin foil rolling. The effects of strip reduction and pressure viscosity coefficient parameter Y are relatively insignificant. Theoretical predictions of the change in roughness amplitude for the long and short wavelength components are compared with reported experimental measurements on cold rolled aluminium strip of ingoing thickness 0.82 mm. Agreement was good at a strip reduction of 25 percent. At a reduction of 50 percent agreement is reasonable, although it appears that the short wavelengths are crushed slightly more than predicted, perhaps due to burnishing in the work zone. A regime map is drawn up with axes s and strip reduction r. The borders of the region of validity of the new model are included on this map, located either where there is no asperity contact between the two surfaces or where the inlet and transition regions are no longer short compared with the length of the bite. Acknowledgement The support of EPSRC, Alcan International Ltd. and Cegelec Projects Ltd. (now Alstom) is gratefully acknowledged. The advice and assistance of Drs. K. Waterson and D. Miller at Alcan, and Dr P Reeve and Mr C Fryer at Cegelec Projects is much appreciated. References Baglin, K. P., 1986,”Elastohydrodynamic pressure rippling in cylinders finished with a circumferential lay”, Proc. Instn. Mech. Engnrs. 200 (C5), 335-347. Chang, D. F., Wilson, W. R. D. and Marsault, N., 1996, “Lubrication of Strip Rolling in the Low-Speed Mixed Regime”, Tribology Transaction, 39, pp 407-415. 17 Korzekwa, D. A., “ Surface Asperity Deformation During Sheet Forming”, Int. J. Mech. Sci. Vol. 34, No.7, pp 521-539, 1992. Lin, H-S, Marsault, N. and Wilson, W. R. D., 1998, “A Mixed Lubrication Model for Cold Strip Rolling Part I: Theoretical”, Tribology Transaction, 41, 317-326. Lo, S. W. and Horng, T. C., “ Lubrication permeation from micro oil pits under intimate contact condition”, Personal communication ??- is this a translation of their Chinese paper - in any case it needs a date??. Marsault, N. 1998, “Modélisation du régime de lubrification mixte en laminage à froid”. PhD Thesis, L'Ecole National Superieur des Mines de Paris, France. Sheu, S. and Wilson, W. R. D., 1994, “Mixed lubrication of strip rolling”, STLE, Tribology Transactions, 37, pp483-493. Sutcliffe, M. P. F., 1989,” Friction and Lubrication in Metal Rolling”, PhD thesis, the University of Cambridge. Sutcliffe, M. P. F. and Johnson, K. L., 1990a,“Lubrication in cold strip rolling in the ‘mixed’ regime”, Proc. Instn Mech Engrs, 204, pp 249-261. Sutcliffe, M. P. F. and Johnson, K. L., 1990b,“Experimental measurements of lubricant film thickness in cold strip rolling”, Proc. Instn Mech Engrs, 204, pp 263273. Sutcliffe, M. P. F., 1999, “Flattening of random rough surfaces in metal forming”, To appear in ASME J. Trib. Sutcliffe, M. P. F. and Le, H. R., 1999, “Measurements of surface roughness in cold metal rolling in mixed lubrication regime”, Submitted to STLE Tribology Transactions. Shey, J. A., 1983, “Surface Roughness Effects in Metalworking Lubrication”, Lubrication Engineering, 39, pp376-382. Tabary, P. T., Sutcliffe, M. P. F., Porral, F. and Deneuville, P., 1996, “Measurements of friction in cold metal rolling”, ASME J. Tribology, 118, 629-636. Wilson, W. R. D., 1977, “Work-piece Surface Roughening in a Hydrodynamically Lubricated Metal Forming Process”, Trans. ASME, J. Lubr. Technol., 99, pp10-14. 18 Wilson, W.R.D. and Sheu, S., 1988, “Real area of contact and boundary friction in metal forming”, Int. J. Mech. Sci., 30, 475-489 19