Torque on a single resonator

Supplementary Material for
“Wireless control and selection of forces and torques - towards wireless engines”
M. Boyvat, C. Hafner, J. Leuthold,
Institute of Electromagnetic Fields (IEF), ETH Zurich, Switzerland
Corresponding author: M. Boyvat (mboyvat@ethz.ch)
First, we present more details about the torque acting on a single resonator (Supplementary Fig. 1) and the effect of quality factor (Supplementary Fig.2). Then, the torque in a resonator system with two axially aligned resonators (Supplementary Fig.3) is given, followed by the scheme of the motor in the text but with different resonators (Supplementary Fig. 4).
Torque on a single resonator
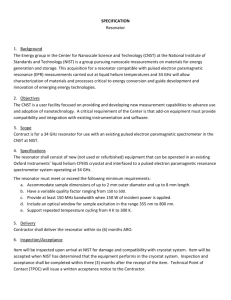
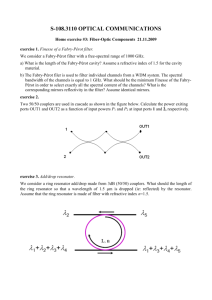
In Figure 1, it is seen that the torque acting on a resonator changes sign at the resonance frequency. The torque vanishes at certain angles and these angles are equilibrium angles. Note that, not all equilibrium angles are stable. Stability requires that any small disturbance causes a restoring reaction on the resonator. Having a stable equilibrium does not always mean a motionless system. Without damping, the resonator would oscillate around the stable equilibrium. Even more complicated motions may be observed as in Liu et al 1 . If the damping is high enough the resonator would settle down in a stable angle in after some time. When the frequency of the external field is above the resonance frequency, the stable equilibrium angles are 90° and 270°. If the angle increases from 90° or 270° by a small amount, the resonator senses a negative torque, whereas if the angle decreases, the resonator senses a positive toque so that it always comes back to stable equilibrium angles. If the angle is 180° or 270°, the resonator is in an unstable equilibrium. Any small increase from these angles would cause a positive torque, which would increase the angle even further or any small decrease would cause a negative torque, which would decrease the angle more. When the frequency is below the resonance frequency but below it, the stable and unstable equilibrium angles are exchanged. The different alignments of the resonator below and above the resonance frequency in the experiment are shown in Supplementary Fig.
2.
a b
Figure 1: Torque acting on a single resonator with the z axis chosen to be the rotation axis. a, The schematic of the single resonator.
is the rotation angle and C =400 pF . b, Torque around the z axis.
It is seen that the torque has opposite directions above and below resonance frequency. The vertical lines show the angles where the torque vanishes, i.e. equilibrium angles. The continuous green lines show the stable equilibrium angles, at which any disturbance causes a torque in the opposite direction to the disturbance, so that the resonator turns back to the equilibrium angle. The dotted white lines indicate unstable equilibrium angles at which any disturbance causes the resonator to leave the equilibrium.
Figure 2: The experiment for the torque acting on a single resonator in opposite directions and alignment of the resonator differently below and above the resonance frequency. The external magnetic field is produced by a larger source coil and the resonator is placed in the center of the source coil. The resonator is free to rotate around the vertical axis. When the frequency of the external magnetic field is above the resonance frequency, the resonator rotates from its initial direction to a direction parallel to the source coil and it is stabilized at this final direction. If the frequency is above the resonance frequency, then the resonator senses an opposite torque and gets stabilized at a direction perpendicular to the source coil.
Influence of the quality factor
a
b
c d
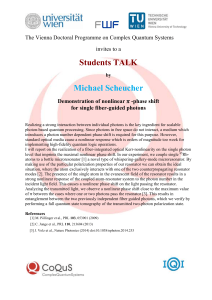
Figure 3: The influence of the quality factor. a, Different resonators to obtain bidirectional forces.
C
1
600 pF , C
2
400 pF . b, The axial force F x
on the first resonator. It is the same as in Fig. 2c in the article (Q=30). c, Q=60. d, Q=90. It is seen that the strength of the forces increases while the bandwidth decreases with increasing quality factor.
Torques on on-axis resonators
a b
c
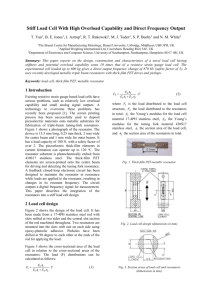
Figure 4: The torque in an on-axis resonator pair. a, The schematic of the resonator pair. The first resonator is assumed to be free to rotate around the z -axis whereas the second resonator is fixed. b,
The torque acting on the first resonator in case of identical resonators ( C
1
= C
2
= 400 pF ). c, The torque acting on the first resonator in case of different resonators ( C
2
is the same as in (b) whereas C
1 is modified to 600 pF ).
Off-axis tilting in different resonators
a
b
Figure 5: Torque in a system with different resonators when one of them (resonator II) is placed off-axis at a distance d , angle
, and tilted by an angle
similar to the motor in the article ( d =4 cm and
=
=45°). The resonator I is free to rotate around the z -axis. a, The schematic of resonators. C
1
=600 pF , C
2
= 400 pF . b, The torque acting on the first resonator. The white dotted curves show the borders between positive and negative torques. All points on these lines are equilibrium points. It is seen that the value of the stable angle continuously changes with frequency, especially in the area marked by the arrow. This is different from the case of a single resonator (see Supplementary Fig. 1).
References
1. Liu, M., Powell, D. A., Shadrivov, I. V., Lapine, M. & Kivshar, Y. S. Self-oscillations in nonlinear torsional metamaterials. New J. Phys. 15, 073036 (2013).