Thinning Algorithm
advertisement

1
Introduction
1.1
Thinning Algorithm
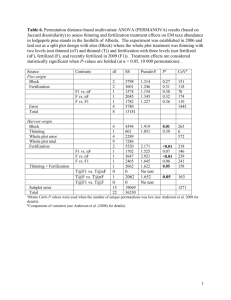
Thinning algorithm is a Morphological operation that is used to remove selected
foreground pixels from binary images. It preserves the topology (extent and
connectivity) of the original region while throwing away most of the original
foreground pixels. Figure 1.1 shows the result of a thinning operation on a
simple binary image.
Original Image
Thinned Image
Figure 1.1
Thinning is somewhat like erosion or opening. It can be used for several
applications, but is particularly useful for skeletonization and Medial Axis
Transform. In this mode it is commonly used to tidy up the output of edge
detectors by reducing all lines to single pixel thickness [6].
Like other morphological operators, thinning operators take two pieces of data
as input. One is the input image, which maybe either binary or greyscale. The
other is the structuring element, which determines the precise details of the
effect of the operator on the image [5].
1.2
Mathematical Morphology
Mathematical Morphology is the analysis of signals in terms of shape. This
simply means that morphology works by changing the shape of objects
contained within the signal. Mathematical morphology was developed in the
1970’s by G.Matheron and J.Serra [4]. Morphology has several advantages over
other techniques especially when applied to image processing as outlined
below:
Preserves edge information
Works by using shape-based processing
Can be designed to be idempotent
Machine Vision
Thinning Algorithms
Page 1 of 14
Computationally efficient
Morphology uses ‘Set Theory’ as the foundation for many functions. The
simplest functions to implement are ‘Dilation’ and ‘Erosion’. Dilation in 1D is
defined as:
where A and B are sets in Z.
This definition is also known as ‘Minkowski Addition’. This equation simply
means that B is moved over A and the intersection of B reflected and translated
with A is found. Usually A will be the signal or image being operated on and B
will be the ‘Structuring Element’.
The opposite of dilation is known as erosion. This is defined as:
This definition is also known as ‘Minkowski Subtraction’. The equation simply
says erosion of A by B is the set of points x such that B translated by x is
contained in A.
Morphology has been used in a wide range of applications. A few of the
possible applications are listed below:
1.3
Image enhancement
Image restoration (i.e. removing scratches from digital film)
Edge detection
Texture analysis
Noise reduction
Structuring Element
The structuring element consists of a pattern specified as the coordinates of a
number of discrete points relative to some origin. Normally Cartesian
coordinates are used and so a convenient way of representing the element is
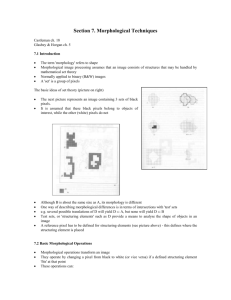
as a small image on a rectangular grid. Figure 1.2 shows a number of different
structuring elements of various sizes. In each case the origin is marked by a
ring around that point. The origin does not have to be in the center of the
structuring element, but often it is. As suggested by the figure, structuring
elements that fit into a 3×3 grid with its origin at the center are the most
commonly seen type.
Machine Vision
Thinning Algorithms
Page 2 of 14
Figure 1.2
Each point in the structuring element may have a value. In the simplest
structuring elements used with binary images for operations such as erosion,
the elements only have one value, conveniently represented as a one. More
complicated elements, such as those used with thinning or greyscale
morphological operations may have other pixel values.
In the structure element 1’s are represented as the foreground pixels and 0’s
are represented as the background pixels. The Blanks are indicated as “don’t
care”.
When a morphological operation is carried out, the origin of the structuring
element is typically translated to each pixel position in the image in turn, and
then the points within the translated structuring element are compared with the
underlying image pixel values. The details of this comparison and the effect of
the outcome depend on which morphological operator is being used.
Machine Vision
Thinning Algorithms
Page 3 of 14
2
Thinning Methods
2.1
General
Thinning algorithms can be divided into two broad classes namely iterative and
non-iterative. Although non-iterative algorithms can be faster than iterative
algorithms they do not always produce accurate results.
2.2
Iterative Thinning
The Template-Based Mark-and-Delete Thinning Algorithms are very popular
because of their reliability and effectiveness. This type of thinning processes
uses templates, where a match of the template in the image, deletes the center
pixel. They are iterative algorithms, which erodes the outer layers of pixel until
no more layers can be removed [3]. Almost all iterative thinning algorithms use
Mark-and-Delete templates including Stentiford Thinning Method.
Both Stentiford and Zhang-Suen methods use Connectivity numbers to mark
and delete pixels.
2.2.1 Connectivity Number
The Connectivity number is a measure of how many objects are connected with
a particular pixel. The following is the equation to calculate Connectivity number.
Where: Nk is the colour of the eight neighbours of the pixel analyzed. N0 is the
center pixel. N1 is the colour value of the pixel to the right of the central pixel
and the rest are numbered in counter clockwise order around the center.
S = {1, 3, 5, 7}
Figure 2.1
The following are the connectivity numbers for Figure 2.1:
a) Connectivity number = 0.
b) Connectivity number = 1.
c) Connectivity number = 2.
Machine Vision
Thinning Algorithms
Page 4 of 14
d) Connectivity number = 3.
e) Connectivity number = 4.
2.2.2 Stentiford Thinning Algorithm
It uses a set of four 3 x 3 templates to scan the image.
Figure 2.2 shows these four templates.
Figure 2.2
The Stentiford Algorithm can be stated as following:
1. Find a pixel location (i, j) where the pixels in the image match those in
template T1. With this template all pixels along the top of the image are
removed moving from left to right and from top to bottom.
2. If the central pixel is not an endpoint, and has connectivity number = 1, then
mark this pixel for deletion.
Endpoint pixel: A pixel is considered an endpoint if it is connected to just one
other pixel. That is, if a black pixel has only one black neighbour out of the eight
possible neighbours.
3. Repeat steps 1 and 2 for all pixel locations matching T1.
4. Repeat steps 1-3 for the rest of the templates: T2, T3, and T4.
T2 will match pixels on the left side of the object, moving from bottom to top
and from left to right. T3 will select pixels along the bottom of the image and
move from right to left and from bottom to top. T4 locates pixels on the right
side of the object, moving from top to bottom and right to left.
5. Set to white the pixels marked for deletion.
Machine Vision
Thinning Algorithms
Page 5 of 14
Figure 2.3 shows some examples of the thinning process using the Stentiford
Algorithm.
Figure 2.3
2.2.3 Zhang-Suen Thinning Algorithm
This skeletonization algorithm is a parallel method that means the new value
obtained only depend on the previous iteration value. It is fast and simple to be
implemented. This algorithm is made by two sub-iterations. In the fist one, a
pixel I (i , j) is deleted if the following conditions are satisfied [3]:
1. Its connectivity number is one.
2. It has at least two black neighbours and not more than six.
3. At least one of I(i,j+1), I(i-1,j), and I(i,j-1) are white.
4. At least one of I(i-1,j), I(i+1,j), and I(i,j-1) are white.
In the second sub-iteration the conditions in steps 3 and 4 change.
1. Its connectivity number is one.
2. It has at least two black neighbours and not more than six.
3. At least one of I(i-1,j), I(i,j+1), and I(i+1,j) are white.
4. At least one of I(i,j+1), I(i+1,j), and I(i,j-1) are white.
At the end, pixels satisfying these conditions will be deleted. If at the end of
either sub-iteration there are no pixels to be deleted, then the algorithm stops.
Figure 2.4 shows some examples of the thinning process using the ZhangSuen Algorithm
Machine Vision
Thinning Algorithms
Page 6 of 14
Figure 2.4
2.3
Non-Iterative Thinning
There is a fast non-iterative thinning algorithm proposed by Neusius-Olszewski
[2]. It has time complexity of O (n2).
2.3.1 Neusius-Olszewski Algorithm
Approach
It is possible to state for some black nodes whether they belong to the skeleton
or not by examining the kind of their four edges. For example, when there are
four incoming edges to a node, the node certainly belongs to the skeleton; it
represents a local maximum in this case, and therefore lies in the middle of the
object. Unfortunately the nodes found by this method do not building a sound
skeleton; the connectivity is not preserved. This is called a pre-skeleton.
Further step is necessary construct the skeleton [6].
This algorithm can be summarized as follows:
(1) Label all nodes with their minimal distance to an edge of the object.
(2) Detects all nodes of the pre-skeleton.
(3) Find the remaining skeleton nodes to preserve connectivity.
Machine Vision
Thinning Algorithms
Page 7 of 14
3
Applications of Thinning Algorithm
Thinning can be used for several applications such as hand-written character
recognition, but it is particularly useful for skeletonization, which has been
successfully applied in the following three medical applications [7]:
Assessment of laryngotracheal stenosis,
Assessment of infrarenal aortic aneurysm, and
Unravelling the colon.
Each of the emerged three applications requires the cross-sectional profiles of
the investigated tubular organs. The proposed process is sketched as follows:
Image acquisition by Spiral Computed Tomography (S-CT),
(semiautomatic snake-based) segmentation (i.e., determining a binary
object from the grey-level picture,
Morphological filtering of the segmented object,
Curve thinning (by using one of our 3D thinning algorithm),
Raster-to-vector conversion,
Pruning the vector structure (i.e., removing the unwanted branches),
Smoothing the resulted central path, and
Calculation of the cross-sectional profile orthogonal to the central path.
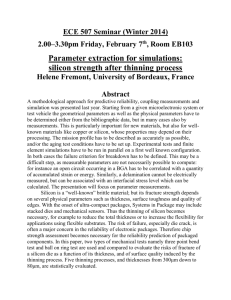
The above applications were proposed by Dr Kálmán Palágyi who is an
associate professor of University of Szegek, Hungary. The following sections
describe each application in detail including tests carried out on patients.
3.1
Assessment of Laryngotracheal Stenosis
Many conditions can lead to laryngotracheal stenosis (LTS), most frequent
endotracheal intubation, followed by external trauma, or prior airway surgery.
Clinical management of these stenosis requires exact information about the
number, grade, and the length of the stenosis. There is a method developed for
assessment of LTS. The cross-sectional profiles (based on the central path) of
the upper respiratory tract (URT) were calculated for 30 patients with proven
LST on fiberoptic endoscopy (FE). Locations of LTS were determined on axial
S-CT slices and compared to findings of fiberoptic endoscopy (FE) by Cohen's
kappa statistics. Regarding the site of LTS an excellent correlation was found
between FE and S-CT (z=7.44, p<0.005). Site of LTS, length and degree could
be depicted on the URT cross-sectional charts in all patients.
Machine Vision
Thinning Algorithms
Page 8 of 14
Figure 3.1
The segmented URT, its central path, and its cross--sectional profile at the
three landmarks (vocal cords, caudal border of the cricoid cartilage, and cranial
border of the sternum) and at the narrowest position (top); the line chart
(bottom).
3.2
Assessment of Infrarenal Aortic Aneurysm
The cross-sectional profile in patients suffering from infra-renal aortic
aneurysms (AAA) was used. AAA are abnormal dilatations of the main arterial
abdominal vessel due to atherosclerosis. AAA can be found in 2% of people
older than 60 years. If the diameter is more than 5 cm then the person is at high
risk for AAA rupture, which leads to death in 70-90%. For therapy two main
options exist: surgery or endoluminal repair with stentgrafts. For optimal patient
management the "true diameter" in 3D as well as the distance to the origin of
the renal arteries (proximal aneurysma neck) as well as the extension to the
iliac arteries (distal aneurysma neck) have to be known.
Figure 3.2
Machine Vision
Thinning Algorithms
Page 9 of 14
The segmented part of the infrarenal aorta and its central path. Along the
central path the cross-sectional profile was computed. The following
parameters could be derived from this approach: the maximum diameter in 3D
as well as the length of the proximal and distal neck of the aneurysma. Since
size of the aneurysma is regarded to be a prognosticated factor, the volume of
the segmented aneurysma was determined too. At follow-up investigations the
same parameters were derived.
In order to investigate the correctness of the applied 3D thinning algorithms,
some mathematical phantoms were created.
Figure 3.3
Two phantoms and their central paths.
3.3
Unravelling the Colon
Unravelling the colon is a new method to visualize the entire inner surface of
the colon without the need for navigation. This is a minimally invasive technique
that can be used for colorectal polyps and cancer detection. Dr. Palágyi has
proposed an algorithm for unravelling the colon which is to digitally straighten
and then flatten using reconstructed spiral/helical computer tomograph (CT)
images. Comparing to virtual colonoscopy where polyps may be hidden from
view behind the folds, the unravelled colon is more suitable for polyp detection,
because the entire inner surface is displayed at one view.
Figure 3.4
The segmented volume of a part of the artificial phantom with two polyps (top)
and the same part of the phantom after unravelling (bottom).
Machine Vision
Thinning Algorithms
Page 10 of 14
Figure 3.5
The segmented volume of a part of the cadavric phantom with polyps (top) and
the unravelled colon (bottom).
Machine Vision
Thinning Algorithms
Page 11 of 14
4
Discussion and Conclusion
The Stentiford method tends to produce lines that follow curves very well,
resulting in vectors that most accurately reflect the original image. The Zhang Suen method tends to be better at extracting straight lines from a raster, so
may result in more desirable vectors from an original image which comprises
mainly straight lines [8].
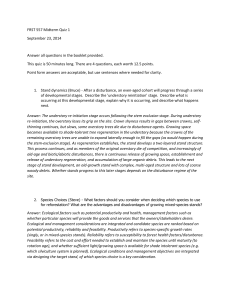
Finally, since sometimes, when thinning is complete, there are still pixels that
could be deleted (principal among these are pixels that form a staircase). It is
possible to use Holt’s staircase removal algorithm, which allows half of the
pixels in a staircase to be removed without affecting the shape of
connectedness of the overall object by applying a template-matching technique.
The following (figure 4.1) shows the thinned image resulting from the
application of a hybrid implementation based on the merging of the above
algorithms in the following order: Stentiford’s pre-processing scheme feeding
images into Zhang-Suen’s basic algorithm, with Holt’s staircase removal
algorithm as a post-processor [2].
Figure 4.1
Machine Vision
Thinning Algorithms
Page 12 of 14
Although there are many thinning algorithms proposed over the years they
produce some sort of side effects such as necking (figure 4.2(a)), tails (figure
4.2(b)) and hairs (figure 4.2(c)). There is yet to be a thinning algorithm that
does not produce any side effect. There are lot of institutes that are undertaking
research on thinning, and it is hoped that there will be a perfect thinning
algorithm in the near future.
Figure 4.2
Machine Vision
Thinning Algorithms
Page 13 of 14
5
References
[1]
A Noniterative Thinning Algorithm [online]. Available:
http://portal.acm.org/ft_gateway.cfm?id=174604&type=pdf&coll=portal&d
l=ACM&CFID=11111111&CFTOKEN=2222222
[2]
Computer-assisted analysis of in-vitro vasculogenesis and angiogenesis
processes [online]. Available:
http://wscg.zcu.cz/wscg2004/Papers_2004_Full/M37.pdf
[3]
Image Processing Techniques For Machine Vision [online]. Available:
http://www.eng.fiu.edu/me/robotics/elib/am_st_fiu_ppr_2000.pdf
[4]
Mathematical Morphology [online]. Available:
http://dmsun4.bath.ac.uk/research/morphology/morphology.htm
[5]
Morphology Thinning [online]. Available:
homepages.inf.ed.ac.uk/rbf/HIPR2/thin.htm
[6]
Morphology Thinning [online]. Available:
http://www.cee.hw.ac.uk/hipr/html/thin.html
[7]
Skeletonization [online]. Available:
http://www.inf.u-szeged.hu/~palagyi/skel/skel.html#Applications
[8]
Vectorisation Thinning [online]. Available:
http://homepage.ntlworld.com/heatons/softsoft/wintopo/help/html/vectoris
e.htm
Machine Vision
Thinning Algorithms
Page 14 of 14