Ethan Frome
advertisement

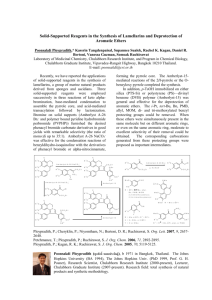
centre position (a ii , bij ) in which transmission levers are
LOGO
MONOGRAFIJE
82,5 x 50 mm
connected to members of mechanism kinematical pair.
Driving part of mechanism is formed of: hydro-cylinder of
double way action, driving member Cij of mechanism
transmission part and relatively fixed member Lj of
mechanism kinematical pair. Members of driving part are
connected in a way to form four-member plane mechanism
with single translation-sliding articulation and three rotary
articulations. Driving part of mechanism is determinated by
parameters of hydro-cylinder: inicial cip and final cik
kinematical length and piston diameter di1 and piston rod di2
and also by vectors of articulation centre position (a i , b j ) in
which hydro-cylinder is connected to members of mechanism
kinematical pair.
By developed procedure of synthesis, parameters of
mechanism members contained in valve group are
determinated:
MECHANISM SYNTHESIS OF
MANIPULATOR OF MOBILE
MACHINES1)
eip d i 1 ,d i 2 ,cip ,cik ,ai ,bi ,aij ,bij ,ci ,cij
Dragoslav JANOŠEVIĆ
Nikola PETROVIĆ
Vesna NIKOLIĆ
1. INTRODUCTION
Manipulator mechanisms of mobile machines are
performed in the shape of plane lever configuration with
hydro-cylinder connected, directly or indirectly, to
members of kinematical pair of mechanism. General
model of mechanism is consisted of transmission and
driving part (fig.1).
Transmission part of mechanism is composed of relatively
fixed Lj and movably Li members of mechanism kinematical
pair Lj - Li, and of driving Cij and transmission lever Cii.
Members of mechanism transmission part are connected in a
way to form plane articulation quadrangle. Transmission part
of mechanism is determinated by kinematical lengths of
transmission lever Cij, Cii and by vectors of articulation
I
γs
Cij
а) p,Q
di1 c
i
di2
ci ,ci , Fci
Cii
dc
аi
qci
γc
bi
Li
xi
dq
aii
qi
bii
Lj
Oi
qci ,qci , M ci
-βij
qi ,qi ,M ci
Fig.1 General model of manipulator mechanism
1)
(1)
During synthesis, parameters of mechanism functions and
parameters of hydrostatic system of mechanism,
contained in valve group, are given:
Abstract: Actuating mechanism synthesis optimal solving
of actuators parameters, transmission levers lengths and
joints coordinates in which the actuator and transmission
levers are connected to the members of manipulator
kinematic chain. In synthesis the start is the prescribed
rang of move, needed actuating swing torque and
available pressure of the hydraulic system.
II
xj
w
Pip qin ,M oin
,ti , p
(2)
where: qin = {qi1, qi2, qi3} – is subgroup of angles
determinated by: initial qi1 (fig.2) and final qi3 position,
and by position qi2 in extent of motion of relatively movaw
ble member of mechanism, M oin
M owi1 , M owi2 , M owi3
- subgroup of the strongest moments of mechanism stress,
determinated, for both ways of action, in given
mechanism position, ti - duration time of mechanism
motion extent, p = {pr, pb, po} - value subgroup of
operating pr and blocking pb pressure, and pressure po in
reversing pipe of mechanism hydrostatic system.
2.
SYNTHESIS OF MECHANISM
TRANSMISSION PART
Analitic procedure based on general Freudenstein`s
method [1] of articulated quadrangle construction is
defined in purpose of synthesis of manipulator
mechanism transmission part.
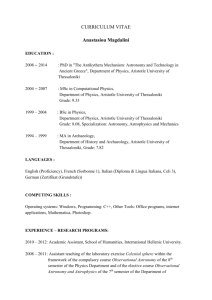
Kinematical lengths of particular members of articulated
quadrangle of mechanism transmission part are
determinated on the basis of three given position ψin
(fig.2) of mechanism driving member and corresponding
given position θin of mechanism executive member with
the help of equation
bij
aii eio si ; bij ei1aii ; cij
;
ei 2
(3)
cii ( aii2 bij2 cij2 2ei 3 aii cij )1 / 2
where: eio – is selected constructing relation of attached aii
and recognized kinematical length si of mechanism
executive member:
Paper done within the research project ‘Development of the Model and Technologies of Logistics of the Communal Waste Transport” from the
Program of Technological Development, No. 14068, financed by the Ministry of Science ofthe Republic of Serbia.
ei 1
u1
,
u3
ei 2
xi
u2
,
u3
n=1
ii
ei 3 cos( i1 i1 ) ei 2 cosi1 ei1 cos i1
in ( qin ii ij )
n 1,2,3
Li
cii
(4)
cij
i1
where:
u1 (cos i 1 cos i 2 )cos( i 1 i 1 ) cos( i 3 i 3 )
(cos i 1 cos i 3 )cos( i 1 i 1 ) cos( i 2 i 2 )
ij
qi1
aii
θi1
Mci1
u2 (cos i 1 cos i 2 )cos( i 1 i 1 ) cos( i 3 i 3 )
Moi1
bij
(cos i 1 cos i 3 )cos( i 1 i 1 ) cos( i 2 i 2 )
а)
xj
Oi
Lj
u3 (cos i 1 cos i 3 )(cos i 1 cos i 2 )
(cos i 1 cos i 2 )(cos i 1 cos i 3 )
Condition coordinates of driving member of mechanism
transmission part (qci , q ci , M ci ) are determinated in
dependence of condition coordinates of mechanism
executive member (qi , q i , M i ) with the assistance of
equation (fig.1):
i2
φi2
Mci2
θi2
ij
qi2
Li
xj
cij sin( s c )
Oi
Lj
b)
,
Moi2
(5)
i3
cij sin s c
aii sin s q
xi
si
aii
biј
aii sin( s q )
M ci M oi
ii
cii
n=2
qci c ij ,
qci qi
i2
cij
.
3. SYNTHESIS OF MECHANISM DRIVING PART
For purpose of synthesis of manipulator mechanism
driving part, analitic procedure [2] based on graphic
procedure shown in paper [3] is defined.
Analitical procedure of synthesis of mechanism
driving part, at first place, on the basis of mechanism
w
stress moments M cin
, and by selection of piston diameter
value and piston rod selected from data bank Dij of
standard hydro-cylinders defines needed sides rin of
hydro-cylinder action in relation to centre line of
articulation of mechanism kinematical pair, for the
purposes of three given position (fig.3a):
nci {( pi1 Ai1 pi 2 Ai 2 ) Fti }
rin max
(6)
w
n 1,2 ,3 M cin 0 , pi1 po , pi 2 pr
w
M cin
0 , pi1 pr , pi 2 po
w
k h M cin
where: nci - is number of mechanism hydro-cylinders, khis coefficient of hydraulic stability of driving mechanism,
Ai1, Ai2, pi1, pi2 - are working surfaces and pressures on
cylinder sides and hydro-cylinder piston rod, Fti – hydrocylinder friction force.
According the longest side ri = max (ri1, ri2, ri3) of hydrocylinder action and given motion extent φoi = qcn1 - qcn3 of
mechanism driving member, necessary stroke, initial and final
length of hydro-cylinder is found:
Мci3
cij
ij
θi3
biј
c)
cii
Oi
xj
Lj
Мoi3
aii
ii
qi3
Li
n=3
xi
Fig. 2 Position of mechanism transmission part at synthesis
chi kc ri sin(
oi
2
) , cip chi cci ; cik chi cip ,
(7)
And therefore there are determinations related to allowed
speed of piston stroke and hydro-cylinder flexible stability:
F
ci cdi , cd ci ,
(8)
pb Ai1
Where: kc – is coefficient of hydro-cylinder stroke, cci –
construction length of hydro-cylinder, ċdi, Fcd, νci allowed speed of motion, allow force of buckling and
coefficient of hydro-cylinder flexible stability.
Attached lengths ai and bi which define hydro-cylinder and
mechanism connection, are determinated from the following
system of equations and unequations (fig.3b):
2
a) ( x ai )2 y 2 cip
,
Coordinates of the part of closed curve line which satisfy
unequation (9e), define possible attached lengths bi on
relatively fixed mechanism member:
b) ( x ai cos oi )2 ( y ai sin oi )2 cik2 ,
y ki x
c)
(9)
cik cip
d)
2 sin(
oi
2
ai
)
cik cip
2 sin(
oi
2
, e) y 0
)
Given equations and unequations are defined in
coordinate system Oxy. Coordinate beginning of the
system O is placed in centre of articulation of mechanism
kinematical pair. Attached length ai of movable member
in borer initial position is agreed with Ox center line, and
in final position with identical centre line creates angle of
motion extant φoi.
Equations (9a) and (9b) present equation of circles Kp, Kk
with radiuses identical with initial cip and final cip length
of cylinder. Circles centers present member in initial and
final position of mechanism. By changing attached length
ai of mechanism, in extent of given unequation (9d), there
is appearance of section points of circle which create
closed curve line Zi determinated by coordinates:
xi
m
4a ( 1 cos )c
2
i
oi
4 ai
2
ik
(10)
cip2 ( 1 cos oi )ai2 ( cik2 cip2 )2
1/ 2
4 ai
Closed curve line presents Zi geometric place of possible
centers of articulations in which hydro-cylinder is
connected to relatively fixed mechanism members.
(11)
Equation (9c) presents straight line which goes through
coordinate beginning O an articulations center in which
hydrocylinder is connected to relatively fixed member of
mechanism kinematical pair. Straight line is determinated
by direction coefficient:
ki tg( pi )
(12)
Angle φpi that makes dependent coefficient of straight line
direction (9c) is derived from the condition of equality of
attached length bi on relatively fixed member of
mechanism kinematical pair, for initial and final position
of mechanism (fig.3a):
bi
cip
ri1
c
ri 3
ik
ai sin pi ai sin( oi pi )
pi arc ctg(
2
cik2 cip
m
m
, yi
sin oi 2ai sin oi
( 1 cosoi )
2
2
( 1 cos oi )( cik
cip
) 2ai2 sin oi
bi ( xi2 yi2 )1/ 2
(13)
cik ri 3 1
ctg oi )
cip ri1 sin oi
Equation of straight line (9c), as it is shown by its
direction coefficient, expresses, besides kinematical and
mechanical condition for mechanism in final positions
realize necessary driving moments at identical pressure of
hydrostatical drive.
By changing equation (9c) in equations (9a and 9b)
square equations are appeared:
2
x 2 ( 1 ki2 ) 2ai x ai2 cip
0
( 1 ki2 )x 2 2ai (cosoi ki sinoi )x ai2 cik2 0 ,
(14)
n=3
y
cik
Kk
n=2
Li
Li
φoi
aik
Ai
φoi
Bi
ai
ri3
cik
ci
ai
x
Moin>0
Moin<0
aip
Oi
Oi
cip
n=1
ri1
bi
ri2
φpi
cip
Zi
Kp
Bi
а)
Lj
b)
y
Bi
Fig. 3 Synthesis of mechanism driving part: a) position of mechanism driving part at synthesis;
b) determination of coordinate connection of hydrocylinder to mechanism driving part
y
y
cik
φio
φio
φi
p
bi1 Oi
ai1
cik
φip
x
cip
bi2
ai2
cip
Zi
Zi
Fig.4 Variants of mechanism solution
From which, by further procedure, possible solutions of
attached length on mechanism movable member is given:
1/ 2
2
2
cik cip (cos oi ki sin oi ) u4
ai1,2
2
(
1
cos
k
sin
)
oi
i
oi
,
(15)
where:
2
u 4 cik2 cip2 (cos oi k i sin oi ) ( 1 ki2 )( cik2 cip2 )2
By changing of calculated possible value of attached lengths
ai1,2 on mechanism movable member in equations (10),
coordinates (xi1,2, yi1,2) of section points of closed curve line Zi
and straight line (9c) are appeared (fig.4). Section points
coordinates (xi1,2, yi1,2), according equation (11), determinate
possible values of attached lengths bi1,2 on relatively fixed
mechanism member. As a result of synthesis, we have, for the
identical hydro-cylinder (fig. 4), two mechanism solutions: ai1
> bi1 and ai2 < bi2, with the same transmission functions.
4. CONCLUSION
[3] Janošević D.: Projektovanje mobilnih mašina, Mašinski fakultet Univerziteta u Nišu, 2006.
[4] Janosevic D., Jevtic V.: Metodes for the optimal hydraulic transmission system sythesis of working equipment of a hydraulic excavator equipped with digging
bucket, Facta Universitatis, series Mechanical engineering
Vol 1, No1, University of Nis, 1994.
[5] Јаношевић Д.: Oптимизация механизмов привода
манипулятора гидравлических экскаваторов, Интерстроймех 2004, Воронеж, Русия, 2004.
[6] Д. Јаношевић: Моделирање и симулација хидрауличких багера, часопис ИМК 14 Истраживање и
развој, бр.1-2/2003, Крушевац.
CORRESPONDENCE
Dragoslav JANOŠEVIĆ, prof. dr
Univerzitet u Nišu
Mašinski fakultet
ul. A. Medvedeva 14
18000 Niš, Srbija
janos@masfak.ni.ac.rs
In this paper is given analytical procedure for synthesis of
transmission mechanism in the shape of plane cranked
quadrilateral which actuator is two-way effect hydrocylinder. In synthesis is associated range of movements
and moments of the load for the initial, final, and among
position of the mechanism, and also folder with hydrocylinder standard sizes.
Nikola PETROVIĆ, asistent
Univerzitet u Nišu
Mašinski fakultet
ul. A. Medvedeva 14
18000 Niš, Srbija
petrovic.nikola@masfak.ni.ac.rs
REFERENCE:
Vesna NIKOLIĆ
Univerzitet u Nišu
Mašinski fakultet
ul. A. Medvedeva 14
18000 Niš, Srbija
ansev83@yahoo.com
[1] Hamilton H., Fred O., Mechanisms and dinamics of
machinery, New York,1957.
[2] Janosevic D., Optimalna sineza pogonskih mehanizama hidraulickih bagera, disertacija, Masinski fakultet
Univerziteta u Nisu, Nis,1997.
x