RF Stability in Energy Recovering Free Electron Lasers: Theory and

SYNCHRONIZATION SYSTEMS FOR ERLS
Stefan Simrock, Frank Ludwig, Holger Schlarb
DESY
Notkestr. 85, 22603 Hamburg News, Germany
Corresponding author: Stefan Simrock
DESY
Notkestr. 85
22603 Hamburg, Germany
Phone: +49-40-8998-4556
FAX: +49-40-8998-4303 e-mail: stefan.simrock@desy.de
ABSTRACT
The next generation light sources requires synchronization of (soft and hard) x-rays to beamline and end station lasers. The relative timing jitter required will be of the order of the photon pulse length down to a few fs between sources separated by ~100 to 500m. Also the synchronization of electron beam production at the photo-injector, the beam acceleration and compression in the linac, the electron arrival time at the insertion devices and some of the beam diagnostics in the linac must be synchronized with a precision of the same order of magnitude. The concept of synchronization is described and limiting factors for synchronization in Energy Recovery Linacs are discussed.
PACS:
Keywords: Synchronization, Timing, Recirculating Linacs
1.
INTRODUCTION
The use of ultrashort light pulses to study coherent interactions in atomic and molecular systems has advanced rapidly in recent years. The development has driven the development of x-ray sources based on accelerator technology such as Free Electron Linacs (FELs) and
Energy Recovery Linacs (ERLs). The production of short photon pulses implies the generation of short electron bunches with a precisely defined arrival time in the case of pump probe experiments. In order to produce the electron bunch with the required properties a precise synchronization of various timing critical subsystems is required. To clarify the meaning of synchronization serveral definitions found in a thesaurus can be used:
1. Coordinating by causing the same time.
2. An adjustment of that causes something to occur or recur in unison.
3. The relation that exists when things occur at the same time.
If there are many systems to be synchronized is becomes important to determine a common reference to which the systems are synchronized. In the case of accelerators an ultrastable rf master oscillator which is common reference to many subsystems should be used to avoid the difficulty in defining the synchronization with respect to a moving target as it may be respresented by the electron beam which is subject to arrivale time jitter in various part of the accelerator.
2.
REQUIREMENTS FOR SYNCHRONIZATION
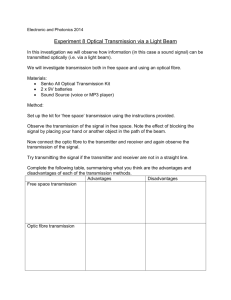
The requirements for synchronization of subsystems of X-FELs are reasonably well understood and technical performance and operational experience have been documented at various facilities. They show significant commonality with the synchronization requirements for ERLs and are therefore discussed first. A generic layout of an FEL with the timing critical subsystems is shown in Figure 1. The subsystems to be synchronized are
RF Gun
1
Photocathode laser
RF acceleration system before the bunch compressor (rf ampl. and phase stability).
Harmonic cavity used in bunch compression scheme (rf ampl. and phase stability).
Linac rf system (rf amplitude and phase stability).
RF master oscillator with several frequency outputs.
Frequency distribution system with multiple reference locations and multiple frequencies.
Laser and rf references for diagnostics systems.
Laser for pump probe experiments.
The requirements are derived from the beam parameters which are:
Energy stability and energy spread
Emittance
Bunch length
Bunch arrival time
The subsystem requirements are specifications for timing stability specified in terms of residual time jitter of the individual subsystems usually with respect to a common master oscillator. In some cases specifications of stability between certain subsystems are needed in addition. One must also distinguish between correlated and uncorrelated errors since low frequency correlated errors between subsystem are not critical. For the for the rf systems amplitude and phase stability must be specified due to conversion of beam energy changes in arrival time changes as a result of dispersion in the beam lines.
In the example of the FEL in Figure 1, typical requirements for the electron bunch length at the undulator are 100 fs, a arrival time jitter of the order of the bunch length (also 100 fs), and an intra-bunch and bunch-to-bunch energy spread of the order of 1e-4. As one can imagine, the timing requiremenents for most other subsystems are also of the order of 100 fs (corresponding
2
to a rf phase stability 0.05 deg. (@ 1.3 GHz). The requirements for the photocathode laser are somewhat relaxed since timing jitter will be compressed in the bunch compressor if it fulfills certain conditions such as undercompression and no acceleration between several bunch compressor stages. The requirements for the rf acceleration system before the bunch compressor are quite stringent due to the R56 in the bunch compressor which converts momentum errors induced by rf amplitude and phase errors into bunch length and arrival time errors.
3.
CHALLENGES FOR TIMING AND RF CONTROL IN ERLs
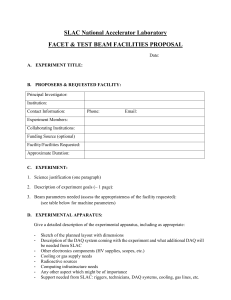
A typical layout of an energy recovery linac is shown in Figure 2. The injector is similar to that of a linac based FEL but the average beam current and and duty cycle are much higher. The concept of energy recovery recquires that the beam accelerator in the main linac returns to the linac with a phase shift of 180 degrees. With close to 100% of the beam recovered the rf power sources for the linac can be quite small providing only reserve control of microphonics and beam loss and path length errors for returning beam. Additional challenges in the ERL based scheme are:
Possibility of beam break-up with thresholds in the mA range.
Timing jitter at the undulator from magnet power supply ripple in the first linac arc due to bunch compression in the arc.
Beam disruption in the insertion devices and subsequent beam scraping in the second arc.
The resulting beam current fluctuation result in heavy beam loading fluctuation in the linaa cavities and may require significant rf power for control.
Time jitter of returning beam resulting in phase errors and subsequent beam loading variations. This also will lead to beam loading fluctuations which must be controlled by the low level rf system.
3
The threshold for beam breakup can be increased with bunch to bunch beam feedback or by proper settings of the beam optics. Amplitude and phase fluctuations of the recovered beam must be held small to ensure that sufficient rf power and feedback gain in the low level rf system are available to control the cavity fields.
4. SOURCES FOR TIMING JITTER
The typical sources for timing error, bunch length variations and energy spread are:
Laser timing jitter (reduced in bunch compressor).
RF stability (rf gun, harmonic cavity, injector rf, linac rf).
Stability of magnets (bunch compression, phase for energy recovery).
The main sources of timing jitter are the phase noise of the master oscillator and the frequency distribution system, phase drifts (usually of thermal nature) between outputs of the frequency distribution system at various locations in the accelerator, noise induced by electromagnetic emissions of high power equipment in sensitive electronics (EMI) and the noise of low level electronics in the associated subsystems. The requirements for the phase noise of the master oscillators are usually specified in the frequency range from 1 Hz to several MHz. Phase noise close to the carrier increase rapidly due to the 1/f characteristics.
Typical SSB phase noise integrated phase noise (=timing jitter) of a low noise oscillator at
1.3 GHz is of the order of -130 dBc at 10 kHz from carrier improving to -150 dBc for frequencies > 100 kHz from carrier resulting in an integrated timing jitter of less than 10 fs for a frequencies offset > 10 kHz. For frequencies closer to the carrier (1 Hz- 10 kHz) the timing jitter becomes larger and can reach several 100 fs. Fortunately this jitter will be the same for all subsystems which must be phase locked to the master oscillator such that the relative jitter between subsystem remain to be very small. Differences in loop bandwidth of the phase locked loop may however result in timing jitter between systems.
4
Nowadays crystal oscillator, dielectric resonators and optical fiber laser oscillators with very low phase noise are available to support timing stability of accelerator subsystem to better than 100 fs and even approaching 10 fs. Also frequency distribution systems which in the past have been realized with thermally compensated and thermally stabilized coaxial cables and are nowadays supplemented or replaced by fiber optic distribution systems which can achieve a similar or better long term stability of the order of 100 fs over distances of several kilometers.
5. DETECTION OF TIMING JITTER
Timing jitter of the various subsystems in the accelerator is usually measured with respect to the master oscillator but can be measured also between subsystems. The types of subsystems are
Optical systems such as lasers for photocathode rf guns, diagnostics, seed laser and pumpe probe lasers, as well as fiber optics laser for frequency reference.
RF systems such as master oscillators, frequency reference outputs of frequency distribution systems, rf gun, harmonic cavity and superconducting cavities in injector or linac.
Beam pick-up from button, strip-line or cavity position or current monitors providing timing signals from the beam.
Various methods exist to measure timing jitter between rf signals, optical signals, and between optical and rf signals.
5.1 RF BASED TIMING JITTER MEASUREMENTS
Timing jitter measurements between rf systems are usually performed as phase measurements using double balanced mixers or active multiplier circuits. Different frequencies can be compared if they are converted to the same frequency first. If they are harmonically related this
5
can be achieved by use of frequency dividers or multipliers. If they are not harmonically related on must synthesize appropriate reference frequencies for up- or downconversion. In general is is favorable to perform the phase measurement at high frequencies since this will improve the signal to noise ratio of the measurement. With typical mixer sensitivies of 10 mV/ deg. of rf phase one can achieve a sensitivity of around 3 uV/ fs at 1 GHz.. With a thermal noise floor of -
174 dBm/Hz and assuming a measurement bandwidth of 1 MHz this has be compared to a noise level of -114 dBm which is equivalent to 0.5 uVrms which would allow a resolution of better than 1 fs. Usually the phase noise of the reference will be dominant (typ. -140 dBc at a frequency offset > 10 kHz for a reference at 1 GHz) and increase the noise floor to around 20 uV allowing for a resolution of 10 fs at a signal to noise ration of 1. The measurement of lon term drift usually difficult due to temperature dependent offset drifts in the double balanced mixer or active multiplier circuits. Also cables and amplifier are susceptible to temperature drifts which can reach the order of 1 ps / deg. C. Careful selection of components, temperature stabilization of the circuits and temperature compensation are necessary to achieve a long time measurement stability of the order of 10-100 fs.
For the measurement of the timing jitter of optical signal with respect to an rf reference the optical signal is converted to an rf signal. In the case of short laser pulses ( femto- to picosecond duration) with a repetition rate of a subharmonic of the rf reference, this can be accomplished by with a photodiode. A beam splitter send a part of the optical signal to a photodiode which creates short electrical pulses (of the order of a few hundred ps for a diode bandwidth of several GHz) .
This pulses contain all harmonics of the laser repetition frequency and a bandpass filter is used to generate a ringing at the desired harmonic. The bandwidth of the filter should be selected according to the desired measurement bandwidth. Typical signal levels are of the order of a few mV at the desired frequency which are amplified to desired rf level of the order -10dBm to 0 dBm. The time jitter measurement then based on a phase measurement of the rf signal. The
6
accuracy of this method is limited by amplitude-to-phase conversion in the photodiode and requires highly amplitude stable optical signals of the order of 1e-4 for a timing jitter resolution of 10 fs. The long term stability is also limited by the temperature dependency of the photodiode.
5.2 OPTICAL TIME JITTER MEASUREMENTS
Balanced cross correlator.
5.3 RF FIELD STABILITY MEASUREMENTS
The cavity field detection can be accomplished with traditional amplitude and phase detectors or with IQ detectors which operated directly at the rf operation frequency or at an intermediate IF frequency which contains the amplitude and phase information. Another possibility if the a scheme employing digital IQ detection where the IF (or the RF signal) is sampled directly by an
ADC which usually samples alternating the real and imaginary components of the cavity. This of course requires correct timing of the data acquisition. With the rapid development of the telecommunication market industry had developed a variety of single chip solutions for amplitude detection, phase detection, and IQ detection based on analog multipliers. Examples are:
AD8343 analog multiplier
RF2411 analog multiplier
AD8361 linear video detector (temperature stabilized)
AD8302 logarithmic video detector and phase detector
HMC 439 digital phase detector
AD8347 IQ detector
7
The same circuits are also used to detect the incident wave and reflected wave vectors usually described as forward and reflected power.
6. SYNCHRONISATION OF ACCELERATOR SUBSYSTEMS
The basic building block for a synchronization system is a phase locked loop (PLL) as shown in Figure 2. It consists of a phase detector to detect the timing error between the two systems to be synchronized, a controller filter which amplifies and filters the error signal, and an actuator for control which can be a voltage controlled frequency source (rf or optical) in th case where a frequency source is phase locked to a reference, or a phase shifter or vectormodulator in the case of rf field control. In the latter case also the amplitude of the field must be controlled.
The quality of the synchronization depends critically on the loop bandwidth and the noise generated in the detector for phase measurement. Typically the master oscillator should be a source with the lowest phase noise available. Very important is the phase noise close to the carrier because all other subsystems will be locked to this reference. The lock bandwidth is typically choosen to be of the order of a few kHz since the phase noise for frequencies
>10kHz from the carries is negligible i.e. < 10 fs. Broadband phase locked loops would add unnecessary noise in the synchronized system.
The typical frequency roll-off of a phase locked loop is 20 dB/decade since the VCO provides the integrator function in the loop. An additional integrator is required if temperature dependend offsets in the stages following the phase detector must be suppressed.
In the case of phase control in the rf cavities one must distinguish between pulsed or cw operation of the cavities. While usually an integrator is applied in cw operation one avoids the integrator in pulsed operation to guarantee a constant error during the short pulses.
8
7. ARCHITECURE OF SYNCHRONIZATION OF ACCELERATOR SYSTEMS
The basic components for accelerator synchronizations systems are:
RF oscillator (crystal, saw, dro)
Modelocked laser oscillator (fiber, Ti-Sa etc.)
Optical to rf and rf to optical convertes
Coaxial frequency distribution
Fiber optic distribution (optical pulses or rf modulated optical cw laser)
Beam pickups (beam phase, beam position) and beam diagnostics (bunch length etc.)
Low level rf control systems
The concept of a precision synchronization system for large scale accelerator will employ most of the above elements in a combination which will give the utmost stability of the subsystems which have to be synchronized. Ageneral scheme of this concept is shown in Figure 5. The master oscillator makes use of a fiber optic laser which provides low phase noise and its optical distribution system which is stabilized by interferometric methods. The long term stability of the fiber laser is guaranteed by a crystal oscillator and atomic reference which boh provide the long term stability. The optical references are distributed to strategic locations where they are converted to rf signals to server as reference for the low level rf control systems. Optical systems such as the lasers for the photocathode, diagnostics or pump probe experiment may be synchronized directly with optical methods. Finally the beam information will be used to guarantee the long term stability.
8. STATE OF THE ART PERFORMANCE
9
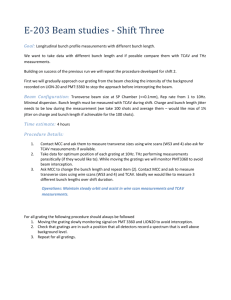
Present state of the art in performance of synchronization of optical system has surpassed the 1 fs level in a laboratory environment. However in a noisy accelerator environment this performance needs to demonstrated. For rf measurements the best results that have been obtained are of the order of 10 fs at a frequency of 1.3 GHz. For rf control the best results are of the order of 1e-4 for amplitude and 0.01 deg. for phase for superconducting cavities operated at 1.5 GHz.
9. DISCUSSION AND CONCLUSIONS
ACKNOWLEDGEMENTS
Many colleagues have contributed towards the understanding of synchronization issues for future X-FELs :
10
FIGURE CAPTIONS
Figure 1. Schematic of FEL with subsystems.
Figure 2. Schematic of ERL with timing relevant subsystems.
Figure 3. Basic configuration of a phase locked loop.
Figure 4. Phase noise budget for synchronized systems.
Figure 5. Architecture for synchronization of accelerator subsystems.
.
Figure 6. Example for beam energy and timing stability for the VUV-FEL.
11
REFERENCES
[1] L. Merminga and J. J. Bisognano, “Energy Stability in a High
Average Power FEL,” Proceedings of the 1995 Particle Accelerator
Conference.
[2] L. Merminga, J. J. Bisognano and J. R.Delayen, “Energy Sta-bility in Recirculating, Energy–RecoveringLinacs,” Proceed-ings of the 1995 FEL Conference, New York. Phys. Rev. Lett. Vol. 84, No 4 (2000)
[3] L. Merminga, P. Alexeev, S. Benson, A. Bolshakov, L. Doolittle and G. Neil, “Analysis of the FEL-RF Interaction in Recirculating, Energy- Recovering Linacs with an FEL”, NIM
A 429 (1999) 58-64
Synchronization papers:
[4] R. P. Scott, C. Langrock, B. H. Kolner, IEEE J. Sel. Top. Quant. Elec. 7, 641 (2001).
[5] R. K. Shelton, S. M. Foreman, L.-S. Ma, J. L. Hall, H. C. Kapteyn, M. M. Murnane, M.
Notcutt, J. Ye, Opt. Lett. 2 7, 312 (2002).
[6] A. Bartels, S. A. Diddams, T. M. Ramond, L. Hollberg, Opt. Lett. 2 8, 663 (2003).
[7] T. R. Schibli, J. Kim, O. Kuzucu, J. T. Gopinath, S. N. Tandon, G. S. Petrich, L. A.
Kolodziejski, J. G. Fujimoto, E. P. Ippen, F. X. Kaertner, Opt. Lett. 2 8, 947 (2003).
12
[8] J. Ye, J.-L. Peng, R. J. Jones, K. W. Holman, J. L. Hall, D. J. Jones, S. A. Diddams, J.
Kitching, S. Bize, J. C. Bergquist, L. W. Hollberg, L. Robertsson, L.-S. Ma, J. Opt. Soc. Am. B
2 0, 1459 (2003).
[9] K. W. Holman, D. J. Jones, D. D. Hudson, J. Ye, Opt. Lett. 2 9, 1554 (2004).
[10] J. B. Schlager, B. E. Callicoatt, R. P. Mirin, N. A. Sanford, D. J. Jones, J. Ye, Opt. Lett. 2 8,
2411 (2003).
[11] G. Lenz, K. Tamura, H. A. Haus, E. P. Ippen, Opt. Lett. 2 0, 1289 (1995).
[12] F. Ö. Ilday, J. R. Buckley, H. Lim, F. W. Wise, W. G. Clark, Opt. Lett. 2 8, 1365 (2003).
13
Figure 1
Figure 2
14
Figure 3
Figure 4
15
Figure 5
Figure 6
16
17