Fitzpatrick, E.L. and Askin, R.G. Forming Effective Worker Teams
advertisement

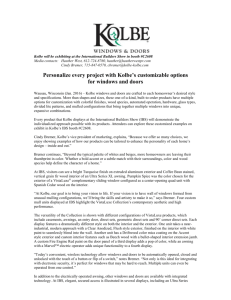
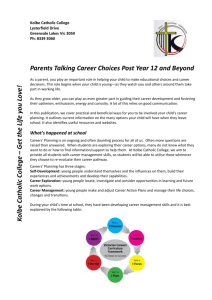
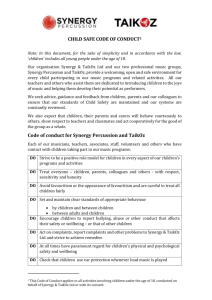
Forming Effective Worker Teams with Multifunctional Skill Requirements Erin L. Fitzpatrick University of Arizona 25 Fiesta Way Los Gatos, CA, 95030 408.399.6428 phone 408.256.3039 fax erin@sie.arizona.edu and Ronald G. Askin* Department of Systems & Industrial Engineering University of Arizona Tucson, Arizona 85721-0020 520.621.6548 phone 520.621.6555 fax ron@sie.arizona.edu April, 2001 Revised, March, 2004 *Corresponding author Forming Effective Worker Teams with Multifunctional Skill Requirements Abstract Throughout much of the past century, manufacturing efficiencies were gained by constructing systems from independently designed and optimized tasks. Recent theories and practice have extolled the virtues of team-based practices that rely on human flexibility and empowerment to improve integrated system performance. The formation of teams requires consideration of innate tendencies and interpersonal skills as well as technical skills. In this project we develop and test mathematical models for formation of effective human teams. Team membership is selected to ensure sufficient breadth and depth of technical skills. In addition, measures of worker conative tendencies are used along with empirical results on desirable team mix to form maximally effective teams. A mathematical programming formulation for the team selection problem is presented. A heuristic solution is proposed and evaluated. Key Words Cellular Manufacturing, Mathematical Programming, Team Performance, Heuristics, Employee Empowerment 1 INTRODUCTION Facing intensified competition in a growing global market, manufacturing companies are reengineering their integrated production systems to achieve lean manufacturing (Askin and Huang (2001)). In recent years there appears to be a trend showing increasing popularity of cellular manufacturing, CM, and other team-related approaches in the workplace (Bailey (1997), Hut and Molleman (1998)) to achieve this goal. Substantial research has been performed to improve the grouping of machines and parts into cells as a result of this trend towards CM (see Burbidge (1975), King and Nakornchai (1982), Kusiak (1987), Askin and Vakharia (1990), Suresh (1991, 1992), Singh (1993), and Shafer (1998) for general reviews). Much less research has been conducted regarding the selection of team members and subsequent training requirements. Manufacturing cells that have been formed solely on machine-part interaction have frequently shown limited benefits (see Carr, Groves (1998) for a list of examples). This failure has led researchers to search for other factors that impact the performance of the work cell, culminating in an increasing interest in the effects of personal skills and traits in the performance of teams. The elements of effective team formation are not limited to personal skills and traits. Burbidge (1975) listed a set of dedicated workers as a key principle of cell autonomy (or independence) that in turn is an essential aspect of successful cells in practice. In a survey of industry, Askin and Estrada (1998) found that training of workers was one of the top concerns when implementing cells. The conversion from traditional jobshop production to CM brings a new culture context to the worker team. In creating cells, workers with process oriented skills must be divided into part oriented teams and assigned to cells with heterogeneous processes. Worker training becomes an integral part of cellular team formation and success. In creating empowered teams, additional technical, teamwork, and administrative skills must be developed among the workforce. Cell productivity depends not only on the technical and administrative skills the workers possess but also the effective interaction among team members. This interaction and the related personality aspects are difficult to include in the aforementioned models due to the problems associated with quantifying their measures. Systems exist that attempt to do so and we will discuss the potential of several of these to be measured quantitatively as well as their demonstrated impact on team productivity. 3 2 PROBLEM STATEMENT Based on this need for effective interaction among team members, the purpose of this paper is outlined as follows. Given an existing labor pool, it is desired to extract multiple teams. This would be required if we were to shift from a non-cellular manufacturing environment to a cellular manufacturing environment. In this case we would need to determine which skilled individuals to place together in which cell. Multiple teams may comprise the entire existing labor pool or just some subset of that pool. For example, if an entire segment of an organization were shifting to cellular manufacturing, the entire labor pool might need to be redistributed. However, if only a portion of the organization was being formed into a small number of teams, the entire labor pool would be considered but only a portion of it allocated. Depending on the nature of the work, cells could have the same makeup or vary from cell to cell. We assume the labor pool itself is segregated into skill categories. Each member of the labor pool is assigned to one and only one skill category. The categories are defined according to the jobs or roles that need to be fulfilled on the team(s). For example, a team may require a milling machine operator, a turning machine operator, an inspector and an assembler. Each of these would become a skill category and any individuals belonging to the labor pool would have to be classified according to one of these skills. In some instances, workers will receive additional cross-training to become multifunctional, but we assume that initially they have a key skill or experience. Furthermore, even cells will extensive cross-training will benefit from having lead individuals for each task to assist in problem solving and training others. There are several assumptions made for this problem scenario. It is first assumed those skill categories and team skill requirements have been clearly defined to the satisfaction of management. This should be developed with due care as lack of appropriate skills will prevent a team from completing its job. The set of individuals in each skill group is assumed known as well. The case where an individual possesses more that one skill and so may choose which skill to fulfill is not considered here. It is also assumed that there exist sufficient individuals in the various skill categories to meet the requirements for the teams. That is, all team skill requirements will be met. It is expected that any deficiencies in requirement availability have been removed through training and/or hiring as appropriate. Several papers (Ebeling and Lee (1994), Süer (1996), Min and Shin (1993), Askin and Huang (1997, 4 2001)) exist that have formulations for solving the training and related aspects of this problem. It is further assumed that all members of a skill category possess adequate skill to successfully perform that task in any cell that requires that skill. While all skill category members may not have equal skill in practice, the assumption may be viewed as recognition that available individuals must be used, and each team has approximately the same importance. Necessary enhancements may be achieved through suitable training. We assume that we have personality profiles of all potential team members being considered with which to measure the interpersonal mix against desired levels. The desired mix and tools for measuring effective team interaction will be described in the next section. This interpersonal mix will be an important factor in deciding the construction of the team. <insert Figure 1 here> Figure 1 illustrates the multiple team, partial labor pool, varying construction problem scenario. All individuals are classified into appropriate skill categories. The problem is then to assign individuals to the disparate teams in such a way that each team has a 'good' interpersonal construction and all technical skill requirements are covered. 'Good' interpersonal construction will be defined later. 3 LITERATURE REVIEW It is stated in this paper that several factors including interpersonal relationships are important in forming teams. For evidence of this see Warner, Needy, and Bidanda (1996). Here, relevant factors in assigning workers to cellular teams from both technological and human interaction perspectives are discussed. In addition, the problem statement made several assumptions. Mainly it was assumed that skill requirements were identified and necessary training had been determined and carried out. Several papers show these factors in the absence of interpersonal relations. In Süer (1996) mixed integer and integer programming models to achieve optimal product and worker assignment to labor-intensive manufacturing cells are developed. Min and Shin (1993) developed a multi-objective model to form cells with consideration of both machines and multi-skilled workers. Training was not considered in these models. The following papers give insight into how this has been addressed. Ebeling and Lee (1994) analyzed the cost and benefit of employee cross-training process on a mixed-model assembly line and formulated a mixed integer programming model to guide cross-training assignments for a specific number of assembly jobs and workers. Askin and Huang (2001) formulated an integer programming model for an aggregate worker assignment and training 5 problem for use in converting a functionally organized manufacturing environment into a CM arrangement. Suresh and Slomp (2001) also provide a cross-training model and link team formation with the cell formation problem. In addition to the personal skills and training requirements addressed in the previous section, a comprehensive evaluation of personality factors is necessary for an effective picture of team performance. D. Wechsler (1997), as president of the Division of Clinical and Abnormal Psychology, 'holds that intellectual ability (including skills) cannot be measured independently of drive, temperament, or emotion', hereafter referred to as personality traits. There are an increasing variety of suggested methodologies for the definition and use of these traits in the formation of successful teams. They all address the same basic questions: can we improve the performance of teams through the inclusion of such traits and if so, how? Although psychology literature does not provide a universal consensus on personality elements, we find that most commonly, as D. Wechsler (1997) puts forth, there are three main classifications of these elements: cognitive, conative, and temperament. Cognitive refers to intellectual ability. This is represented in the individual's ability to learn the skills required, thus we do not consider this here. Conative refers to a person's will, drive or instinct; that approach which they will feel drawn to take in any given situation. Temperament delves into the emotional state and behavior of the individual. Several sources demonstrate the validity of various types of personality measurement in models of team performance (Barrick and Mount (1991), Bailey (1999), Henry and Stevens (1998), Lingard and Berry (2000)). Juran, et. al. (1997) proposes that any variables representing psychological or behavioral characteristics must meet certain criteria before they are used to model a system: (1) Variables must be stable enough over time so as to justify efforts to plan production systems around them. (2) Variables must be easily and reliably measured. (3) Variables must be demonstrably linked to the productivity and/or quality of the production system. These criteria are used in support of the personality dimension measurement system commonly referred to as 'The Big Five'. It focuses on the temperament element of personality. The variables used in this metric are Neuroticism, Extraversion, Openness, Agreeableness, and Conscientiousness. The study also included additional demographic factors. The results of the experiment demonstrated that most of the metrics could be used to explain a large 6 proportion of the variability in productivity. Another frequently employed metric is the social-style implement, Myers-Briggs Type Indicator (MBTI). Hammer and Huszczo (1996) review its use in improving and predicting team performance. Major results in this regard appear limited to a negative correlation between 'similarity' according to the MBTI and performance. Hermann (1996) confirms that teams of individuals with diverse thinking styles obtain better results than homogeneous teams. Individuals are classified according to their Human Brain Dominance Index (HBDI) reflecting relative affinity for creativity, facts, form, and feelings. R. M. Belbin (1981) evaluates the formation of teams in a management setting using eight roles of team members: company worker, chairman, shaper, plant, resource investigator, monitor-evaluator, team worker, and completer-finisher. Studies and anecdotal evidence support this method of team formation (Henry and Stevens (1998), Belbin, Aston and Mottram (1976), Belbin, Watson and West (1997)). However, Henry and Stevens (1998) comment on the need for subjective expertise for the analysis to be effective and Furnham, Steele and Pendleton (1993) question the validity of its psychometric value. The Kolbe Conative Index (KCI) gives a psychometric system that can be used to form successful teams. This system is presented in Kolbe (1989, 1993). The index measures conation, which refers to the part of the mind that controls conscious effort and strives to carry out volitional acts. In other words, it measures the way an individual instinctively approaches problem solving, arranges ideas or objects, and uses time and energy. Behaviors are seen as varying across fact finding, procedure, intuition, and model building. The KCI has some resemblance to the HBDI of Hermann (1996) in the sense that thinking and behavioral styles are divided into four modes with some clear similarities in the definition of modes for the two systems. In both systems, each individual can be portrayed by a profile across these styles, although the KCI index has a more definitive numerical definition. Several studies have shown the index to be effective in predicting team performance. Lingard and Berry (2000) report that a team synergy measure computed from the KCI showed a significant correlation with team performance in software engineering. Fitzpatrick et al. (2001) likewise found significant correlation when evaluating design teams composed of engineering students. An additional experimental study with MBA students at the University of Chicago concluded that the Kolbe Concept was accurate in predicting the performance of teams. Due to the heavy use of the KCI measure in this research, we explain it more fully in the next section. 7 4 KOLBE CONCEPT MEASURES The Kolbe concept offers one approach that satisfies Juran’s criteria. Profiles of individuals may be quickly constructed through an on-line test. Testing and retesting of individuals showed that a significantly high percentage of individuals stay within ten percent of their original scores (Kolbe, 1989). Additionally, the unbiased nature of the Kolbe Concept carries importance when considering people for placement in employment or for a position within an organization. When statistical analysis is carried out on the very large pool of individuals who have completed a Kolbe Index measurement tool, there is no correlation with a specific score to gender, race, or socio-economic background (Kolbe, 1989). 4.1 Individual Kolbe Measures - The Kolbe Conative Index The Kolbe Conative Index (KCI) measures an individual's instinctive behavior or drive. Instinct refers to an innate, action-oriented, sub-conscious drive to approach and perform tasks in a specific manner. It is not a learned behavior but an inherent part of who we are. The KCI defined instincts are neither 'good' nor 'bad' instincts, merely a means to classify and understand the reasons we do things the way we do or react to things in certain ways. The Kolbe Concept classifies instinctive behaviors into four categories: probing, patterning, innovating and demonstrating. Each category has its own corresponding 'Action Mode'. The probing instinct creates a need to investigate in depth. Its corresponding action mode is termed Fact Finder. Fact Finder behaviors are generally linked in some way to the gathering of information, someone who initiates in this instinctive trait will be concerned with details, strategies, research, etc. The patterning instinct causes us to seek a sense of order. The corresponding action mode here is called Follow Through. This mode is characterized by how a person relates to structure. The third category of instinct is innovating, which is the force behind experimentation. Its action mode, Quick Start, is distinguished by perspective on risk. Finally, the demonstrating instinct converts ideas into tangible form. The related action mode of Implementor determines how we relate to objects and physical space. The Kolbe Concept considers that each person has a finite amount of instinctive energy that is allocated over the four modes. How much or how little instinct an individual has in each mode defines an instinctual makeup. 8 Using a bank of test questions to identify action preferences, individuals can be classified into Prevent, Accommodate, and Initiate zones for each mode. Prevention is characterized by the instinct to resist a form of action mode. Fundamentally, a person who is in the prevention operating zone for an action mode will tend to avoid behaving in that mode and attempt to reign in someone who is behaving in that mode. For example, if an individual is in the prevention zone for follow through, they will tend to prevent over-regulating or getting boxed in by someone who has a significant amount of follow through instinct. Response is characterized by the ability to accommodate behavior in an action mode. While someone who is in the response zone may not initiate a type of behavior they can certainly work in this way for a limited amount of time; either a small to moderate portion of each day or all day for a short time. An initiator will often insist performing in the corresponding action mode given any choice. They will tend to initiate that type of behavior and are most comfortable working in that way. 4.2 Kolbe Team Measures Now that we have discussed measures of an individual's instinctive talent, we shift our focus to understanding how this will help us form effective and productive teams. The primary goal in all of the measures we will present is balance. A team's success or failure hinges strongly on the balance of conative energies present within it. A raw team score is constructed by calculating the percent of the team's members who fall in each operating zone for each action mode. This is shown in Figure 2 below. Synergy is the first measure we will discuss. It refers to the distribution of team energy across the operating zones, m, without respect to the action modes, t. Kolbe Corp. has determined through experimental evidence that the optimum distribution of synergy is 25% prevent, 50% respond, and 25% initiate. Allowances are given of ±5%, ±10% and ±5% respectively. Synergistic teams are generally more successful because there is enough "push and pull" from members' differing natural strengths and ways of acting (prevention and initiation zones) to create a balanced opposition of efforts. Second, an ideal team has enough members that can bridge the difference, evaluate and accommodate actions of both sides (response zone), and help to create a mutually acceptable solution in the creative problem-solving process. The synergy of the team shown is shown in Figure 2. 9 <Insert Figure 2 here> It can be seen in Figure 2 above that the team measured only deviates from the optimum range in the initiate operating zone, and by only one percent. The Kolbe Concept uses a measure termed profitability to indicate the deviation from ideal synergy limits. For simplicity, and in keeping with the idea that any deviation from target is undesirable, we will define synergy deviation to be the positive ( d m ) or negative ( d m ) deviation from the ideal mix. Synergy is then the score out of one hundred that represents how close the team is to ideal synergy. High Synergy indicates the team uses an appropriate amount of energy initiating solutions to problems, accommodating actions required, and preventing problems from occurring. A second measure we consider is Inertia. Instead of aggregating across action modes, inertia reviews them individually. Inertia occurs when there is an excess of conative energy in a combination of action mode and operating zone. An excess ( d mt ) is considered anything above 30% in action mode in the prevent or initiate zone and above 60% in the respond zone. To illustrate, consider a team that is heavily weighted in fact finder initiators. The team is likely to be unable to make decisions or take action as there will be a strong sentiment that more data and justification is needed. A team with an excess of follow thru resistors, will refuse to do adequate planning and be thwarted by constant surprises and uncoordinated efforts. The level of inertia present on a team is quantified by a measure out of one hundred computed in a fashion similar to Synergy but summed across all modes. (The Kolbe Concept uses the term goal attainment as a measure of the team’s deviation from the desirable inertia limits). The team in Figure 2 has a poor Inertia score indicating there is a stagnation of energy on the team. Passive behavior, sluggishness, and procrastination characterize the team. Finally, Viability is also a score out of one hundred and is a weighted average of Synergy and Inertia that gives a comprehensive prediction of team performance. 10 5 MIP FORMULATION Labor Pool Extraction Model – Multiple Teams: The situation we will model requires one to form multiple teams from a pool of candidates with the necessary skills. The teams may consist of all or some of the available employees. This situation often occurs when converting to a new cellular manufacturing layout. The model assumes that the part-machine cells have been predetermined, the set of employee skills for the cells has been evaluated, these skills are available in the pool of employees and each employee has been categorized as to the skill role they fill. The problem then becomes the selection of the appropriate employees for each role in the various cells in such a way that the team performance indices of synergy and inertia are maximized. The model is Decision Variables: Yik = 1 if worker i is assigned to team k and 0 otherwise Data Coefficients: j = set of workers in skill group j; aitm = 1 if worker i exhibits operating zone m for action mode t and 0 otherwise; Sjk = number of workers of skill group j required for team k; wm, wmt = relative weights for zone and mode-zone combinations; Zm = desired level of zone m across all modes t (Z1 = Z3 = 1, Z2 = 2); Zmt = maximum desired level of mode t at zone m. Labor Pool Extraction Model - Multiple Teams (LPEMT): Minimize D c h wm d mk d mk wmt d mtk k m k m (1) t subject to: Y S jk , j, k Y 1, i ik i j ik (2) (3) k 11 a Y d mk d mk Z m S jk , m, k itm ik t i a (4) j Y d mtk d mtk Z mt S jk , m, t , k itm ik i (5) j Yik 0,1 , All vars 0 The objective function (1) computes the deviation from optimal Kolbe indices across all teams. Only the deviations in excess of the maximum values are included for the zone/mode combination as we are unconcerned with how low the values reach. Note that the sum over zones within a mode is fixed to 100. Thus, the values are correlated and significant shortages in one combination necessarily reflect excess levels in one or more others. The factors are weighted to facilitate model flexibility. Equation (2) ensures that each team is formed with the appropriate number of members from each skill group. Equation (3) ensures that a worker is assigned to at most one team. Equations (4) and (5) define the deviations for each team from the optimal Synergy and Inertia indices used in the objective function. The optimal values of the indices are set as recommended by the Kolbe system. Finally, we enforce the binary and nonnegativity restrictions on the variables. If required, the model can be run with only one team. The model could be easily modified to minimize maximum deviation for any team or to set upper bounds on deviations. 6 HEURISTIC APPROACH Initial computational experience (using CPLEX) indicated that even moderately small instances of LPEMT are difficult to solve optimally by standard integer programming techniques. In this section we propose a heuristic for solving the group formation problem. The notation used is given below. Notation: j Set of employees in skill group j j 1, J Skill groups l Set of unfulfilled teams i 1, I k Members of team k. s Set of unfulfilled skill groups Employees k 1, K Teams t 1, 4 Action modes; FF,FT,QS,I respectively 12 m 1,3 Operating zones; P,R,I respectively aitm 1 if employee i operates in zone m for action mode t, 0 otherwise. nk number of members required for team k. n j number of individuals available from skill group j. When multiple teams are required, we propose a Balanced Placement heuristic. This algorithm is designed to combine operating zones of high density in available employees with operating zones of low density in partially formed teams. This idea is combined with careful selection and matching procedures to form the Balanced Placement heuristic described below. <Insert figure 3 here> Our approach will be to sequentially build teams, always trying to obtain a good balance of modal instincts in teams, but constraining assignments to the least flexible skill group-mode combination. The justification is that we want to retain flexibility to balance mode properties with the latest assignments. We hope to avoid the bad properties of many greedy heuristics that begin strong but are forced to make arbitrarily bad decisions at the end of the assignment stage. The heuristic begins by computing the average concentration of each skill group in each mode. After scaling for the desirable concentration in the accommodate mode, the skill group-mode combination with the least balance (highest concentration) is selected and we assign workers from this skill group to teams. Balanced Placement Heuristic (1) Initialize: Obtain all 4-tuple employee Kolbe indices and convert to aitm values. Let that are required to form the teams. Let (2) Wmj (3) s be the set of skills l be the set of required teams. Calculate zone distribution of workers in each skill group: 4 a i j t 1 itm nj m 1, 3 j s ; Wmj 4 1 aitm 2 i j t 1 nj m 2 j s . Select the skill group-operating zone combination with highest concentration: 13 3 Set (m*, j*)=argmaxm,j Wmj . Break tie by selecting max Wmj , if still tie choose smallest index. m 1 k where k l with a requirement for same. (4) Assign: Place one i j* into each team (5) Update: Remove all placed personnel from j * and remove skill group j* from (6) Update skill balance: Recompute zone distribution as in step (2) using unassigned workers. (7) Select most concentrated skill group operating zone combination as in step (3). (8) Identify team zone scores: Calculate U k 4 a ik t 1 itm* nk k l . (9) Select minimum team score: Set (k*)=argmink U k , where (10) Evaluate eligible assignments: Calculate Vtm Calculate ditm Vtm aitm i j* , t , m 1, 3; 4 3 Di ditm i j* ; t 1 m 1 (11) a ik * itm s . k l . Ties go to the smallest index. t , m . ditm 2 Vtm aitm i j* , t , m 2 . Di max ditm i j* . Assign worker that most improves score: Set (i*)=argmaxi Di , place i* in k * . If tie, select employee i* corresponding to (i*)=argmini Di' . If tie persists, choose smallest index. l . (12) Update needs and worker availability: Remove employee i* from j * and remove team k* from (13) If all teams' requirements have been met, go to (14). If l 0 , go to (9), else remove skill group j* from s . If x 0 , go to (6), else reset s to include all skill groups still required by teams and go to (6). (14) Report teams k k , END. The balancing heuristic sequentially selects skill groups with poor distribution of worker profiles and matches that group with the team most in need of that operating zone. The group individual most different from the current partial team is assigned. When a concentrated skill group is identified, an inner loop attempts to add one of its individuals to each team requiring that skill until all teams have been examined. The next most concentrated skill 14 group is then identified and the process repeated. When all skill groups have been allocated once, the entire process reinitializes considering the remaining skill needs and available workers. Example. We briefly illustrate the procedure with an example. Consider the formation of two teams, each requiring one worker from each of two skill groups. The six available individuals are shown in Table 1. First note that an individual’s Kolbe Index defines the aitm values. For instance a KCI score of 8363 indicating a Fact Finder insist, Follow Thru resist, Quick Start accommodate and Implementor resist would become the following for worker i: 0 1 0 1 8363 0 0 1 0 . Rows indicate zones and columns the modes. 1 0 0 0 <Place Table 1 about here> Step 1: Table 1 gives the worker number, skill, team, and KCI. The team id is initially allotted as 999 to signify that the teams are empty. Step 2: The weights wmj are determined by summing across operating zone m and skill group j. To normalize, we divide by the number of people in a group and divide operating zone two by two so that all three zones can be compared directly. Thus, w11 =4/3 =1.33, likewise w21 =0.50, w31 =1.67, w12 =2.00, w22 =0.17, w32 =1.67. Step 3: The maximum weight from step two is w12. Hence we let the operating zone m* = 1 and skill group j* = 2. Step 4: We start by placing a member from skill group two into each of the teams. The team for individual 2 is 1 and the team for individual 4 is 2. Step 5: After removing workers 2 and 4, the skill group operating zone weights for remaining available workers are updated to: w11 =1.33, w21 =0.50, w31 =1.67, w12 =0.00, w22 =0.00, w32 =0.00. (We only consider skill group one because skill group two has already been assigned). 15 Step 6-7: The maximum weight is 1.67 and we select operating zone m* = 3 and skill group j* = 1. Step 8: To select the team in which a member of skill group one will be placed, we look for low concentration in m* = 3 in the current partially formed teams. The weight for both partial teams is (1+0+1+0)/2=1 As the weights are identical we arbitrarily choose k* = 1. Step 9-12: Recognizing that the team needs a member different than those already assigned, we compute a distance measure Duv between candidate u and the partial team v. The distances for potential members of skill group one are found by comparing the corresponding rows in Table 1 column by column. The differences for worker 1 are 1,0,1,1,0,1,1,0,1,1,0,1 for a weight D11 = 8. Similarly (noting zone 2 differences are doubled), D31 = 3 and D51 = 8. There is a tie for the maximum distance. We break the tie by selecting the member with the smallest maximum element difference. This corresponds to worker 1. Thus, worker 1 is placed in team 1 and team 1 is temporarily removed from consideration. Step 13: We have not met all the requirements. We have not considered all teams on this pass so we return to step (9). Step 9: Team 2 is selected for consideration. Comparing partial team 2 to remaining skill group 1 workers, we select worker 5, the most discordant. All requirements are met and the process ends with workers 1 and 2 in Team 1 and workers 4 and 5 in Team 2. 7 EMPIRICAL EVALUATION OF BALANCED PLACEMENT HEURISTIC The Balanced Placement Heuristic was coded and tested on a series of problems. Problem characteristics are described in Table 2. Nine different problem sizes were tested. Ten problem instances were randomly generated for each trial set. Each test problem was required to have four skill groups. Each team required an equal number of individuals from each skill group. Thus, if there were twelve members per team, each skill group would contribute three members. <Insert table 2 here> Bounds on the team performance measures were calculated for each data set. Values are deviations from the ideal balance for Synergy and Inertia. Team Viability was taken as a weighted average of Synergy and Inertia, with a 16 55% weight on Synergy. Synergy, Inertia and Viability deviation scores were normalized to have a maximum of one. The lower bounds for Synergy were determined by summing the operating zones for the entire pool of members and dividing by the number of teams. The result was then normalized to a value out of one. This represents the best possible distribution of possible team members to teams for Synergy. The lower bounds for Inertia were constructed similarly but instead of summing over just operating zones, they were calculated over each combination of operating zone and action mode. Values were divided by the number of teams and the result was also normalized to a value out of one. This represents the best possible distribution of possible team members to teams for the Inertia measure. The weighted average of these two measures is the lower bound on Viability. The results were then compared to the lower bounds and a difference obtained. The average differences from lower bounds of these trials are shown in Table 3. The maximum deviation columns refer to the average over a trial set of the largest deviation of any team for a particular problem solution. <Insert table 3 here> The lower bounds were also calculated for the pool of individuals whose team assignment was solved to optimality. These lower bounds and the corresponding performance measures for the optimal solution are given in Table 4. <Insert table 4 here> It is apparent from the tables that the heuristic provided reasonable solutions. Average deviations from the lower bound were 11.8% for Synergy and 7.7% for Inertia. However, these bounds may not be feasible. From Table 4 we see that solutions exceeded the optimum by between 2-6%. 8 CONCLUSIONS Team performance depends on individual behaviors and interpersonal interactions as well as technical competence. The Kolbe Concept describes one measure, the conative or instinctual tendencies of individuals, that can capture this information and serve as a performance metric in quantitative team design models. A mathematical formulation of the team construction problem using a set of labor skill pools was presented. Due to computational complexity a 17 construction heuristic was proposed that guarantees satisfying technical requirements while attempting to form high performance work teams. The heuristic itself had both positive and negative performance characteristics. The average deviation from the lower bound was always less than 12% in our experiments. In itself this is a positive result. It has the potential to be improved with the addition of stronger lower bounds. As we would expect, the maximum deviations from the selected measures are higher but we still, on average, stay below 22%. There are some situations, however, where the heuristic has the possibility of performing poorly. For instance, if the pool of potential members is significantly greater than the required number of members, the calculated weights might not be a good indicator of potential problem areas. Concentrations in each operating zone/action mode combination may provide a better route. Another potential shortcoming is the method of team member selection. Members are selected only considering one measure, Inertia. This could lead to arbitrarily bad solutions with respect to Synergy. Consideration of a combined measure, such as Viability, for team member selection may prove a more robust choice. REFERENCES Askin, R. G. & Estrada, S. (1999). A Survey of Cellular Manufacturing Practices. In: S. Irani, Handbook of Cellular Manufacturing Systems, New York: John Wiley & Sons. Askin, R. G. & Huang, Y. (1997). Employee Training and Assignment for Facility Reconfiguration. Proceedings of the 6th IERC, Miami, FL, 426-431. Askin, R. G. & Huang, Y. (2001). Forming effective worker teams for cellular manufacturing. International Journal of Production Research, 39(11), 2431-2451. Askin, R. G. & Sodhi, M. (1994). Organization of Teams in Concurrent Engineering. In: R. Dorf & A. Kusiak, Handbook of Manufacturing and Automation, New York: John Wiley & Sons. 18 Askin, R. G. & Vakharia, A. (1990). Group Technology Planning and Operation. In: D. Cleland and B. Bopaya, The Automated Factory Handbook, (pp. 317-366) PA: TAB Books. Bailey, D. E. (1997). Manufacturing improvement team programs in the semiconductor industry. IEEE Transactions on Semiconductor Manufacturing, 10, 1-10. Bailey, D. E. (1999). Modeling work group effectiveness in high-technology manufacturing environments. IIE Transactions, 32, 361-368. Barrick, M. R. & Mount, M. K (1991). The big five personality dimensions and job performance: a meta-analysis. Personnel Psychology, 44(1), 1-26. Belbin, R. M. (1981). Management Teams: Why They Succeed or Fail. London: Heinemann. Belbin, R. M., Aston, B. R., & Mottram, R. D. (1976). Building Effective Management Teams. Journal of General Management, 3(3), 23-29. Belbin, R. M., Watson, B., & West, C. (1997). True Colours. People Management, 3(5), 34-38. Burbidge, J. L. (1975), The Introduction of Group Technology. New York: John Wiley. Carr, P. D., & Groves, G. (1998). Teams and Cellular Manufacturing, The Role of the Team Leader. In: N. C. Suresh, & J. M. Kay, Group Technology and Cellular Manufacturing, Boston: Kluwer Academic Publishers. Ebeling, A.C., & Lee, C.-Y. (1994). Cross training Effectiveness and Profitability. International Journal of Production Research, 32, 2843-2859. Fitzpatrick, E., Askin, R. & Goldberg, J. (2001). Using Student Conative Behaviors and Technical Skills to Form Effective Project Teams, Proceedings of the 31st ASEE/IEEE Frontiers in Education Conference, Reno, NV., S2G8S2G13. Furnham, A., Steele, H., & Pendleton, D. (1993). A psychometric assessment of the Belbin Team-Role SelfPerception Inventory. Journal of Occupational and Organizational Psychology, 55, 245-257. Hammer, A. L., & Huszczo, G. E. (1996). Teams. In: A. L. Hammer, MBTI Applications. Palo Alto, California: Consulting Psychologists Press. Henry, S. M., & Stevens, K. T. (1999). Using Belbin’s leadership role to improve team effectiveness: An empirical investigation. The Journal of Systems & Software, 44, 241-250. 19 Hermann, Ned (1996). The Whole Brain Business Book, New York: McGraw-Hill. Hut, J. & Molleman, E. (1998). Empowerment and team development. Team Performance Management, 4(2) 5366. Juran, D. C., Schultz, K. L., Hammer, T. H., McClain, J. O., & Schruben, L.W. (1997). Personality and the Performance of Production Systems. http://www.johnson.cornell.edu/faculty/mcclain/Papers/Papers.htm#Personality. King, J. R., & Nakornchai, V. (1982). Machine Component Group Formation in Group Technology – Review and Extension. International Journal of Production Research, 20, 117-133. Kolbe, K. (1993). Pure Instinct. New York: Random House. Kolbe, K. (1989). The Conative Connection. New York: Addison-Wesley. Kusiak, A. (1987). The Generalized Group Technology Concept. International Journal of Production Research, 25(4), 561-569. Lingard, R. & Berry, E. (2000). Improving team performance in software engineering. http://www.ecs.scun.edu/~rlingard/Publications/TeamLearning/TeachLearnPaper.html. Min, H. & Shin, D. (1993). Simultaneous Formation of Machine and Human Cells in Group Technology: A Multiple Objective Approach. International Journal of Production Research, 31, 2307-2318. Shafer, S. (1998). Part-Machine-Labor Grouping: The Problem and Solution Methods, in Group Technology and Cellular Manufacturing, N. Suresh & J. Kay (eds.), Kluwer Academic Publishers, Boston, 131-152. Singh, N. (1993). Design of Cellular Manufacturing Systems: An Invited Review. European Journal of Operational Research, 69(3), 284-291. Süer, G. A (1996). Optimal Operator Assignment and Cell Loading in Labor-intensive Manufacturing Cells. Computers and Industrial Engineering, 26, 155-158. Suresh, N. C. (1991). Partitioning Work Centers for Group Technology : Insights from An Analytical Model. Decision Sciences, 22(4), 772-791. Suresh, N. C. (1992). Partitioning Work Centers for Group Technology : Analytical Extension and Shop-Level Simulation Investigation. Decision Sciences, 23(2), 267-290. 20 Suresh, N. C., & Kay, J. M. (1998). Group Technology and Cellular Manufacturing: Updated Perspectives. In: N. C. Suresh, & J. M. Kay, Group Technology and Cellular Manufacturing. Boston: Kluwer Academic Publishers. Suresh, N. C. & Slomp, J. (2001). A Multi-objective Procedure for Labour Assignments and Grouping in Capacitated Cell Formation Problems. International Journal of Production Research, 39(18), 4103-4131. Tepke, D., & Davis, H. (1990). Working Paper. University of Chicago Study. Warner, R. C., Needy, K. L., & Bidanda, B. (1997). Worker Assignment in Implementing Manufacturing Cells. In: Proceedings of the IERC (pp. 240-245). Wechsler, D. (1997). Cognitive, Conative, and Non-Intellective Intelligence. In: J. M. Notterman, The Evolution of Psychology: Fifty Years of the American Psychologist. Washington, DC: American Psychological Association. 21 Table 1: Balancing Heuristic Example Problem Worker 1 2 3 4 5 6 1 Skill Group Team ID 1 2 1 2 1 2 999 999 999 999 999 999 KI (Matrix form)1 100001100001 001100001100 010100001100 001100001100 001010010010 100100010001 each set of three consecutive values corresponds to resist, accommodate, and insist for a mode 22 Table 2 – Description of Test Problems Trial Set Number of Teams Members per Team Member Pool 1 4 4 16 2 4 8 32 3 4 12 48 4 8 4 32 5 8 8 64 6 8 12 96 7 12 4 48 8 12 8 96 9 12 12 144 Table 3 - Trial Results Ave. Maximum Team Deviation Average Team Deviation Trial Set Synergy Inertia Viability Synergy Inertia Viability 1 0.272 0.133 0.209 0.141 0.0797 0.113 2 0.266 0.110 0.196 0.120 0.0664 0.096 3 0.246 0.105 0.182 0.114 0.0611 0.090 4 0.267 0.150 0.214 0.114 0.0795 0.098 5 0.278 0.144 0.218 0.121 0.0798 0.102 6 0.260 0.134 0.203 0.109 0.0792 0.096 7 0.282 0.162 0.228 0.112 0.0788 0.097 8 0.345 0.196 0.278 0.125 0.0865 0.108 9 0.273 0.174 0.228 0.106 0.0854 0.097 23 Table 4 – Performance of Optimally Solved Problem Measure Bounds Maximum Deviation Average Deviation Among Teams in the Trial over Trial Synergy 0.0000 0.125 0.0583 Inertia 0.1450 0.093 0.0237 Viability 0.0652 0.110 0.0428 24 Skill Categories Individual Assignments Team Skill Requirements Skill 1 Team 1 Skill 2 Team 2 Skill 3 Skill r Team k Figure 1 - Illustration of Problem Statement 25 Figure 2 - Kolbe Team Synergy 26 (1) Obtain data. Initialize values. (2) & (6) Calculate concentration weighting by zone and skill. (3) & (7) Select largest skill group /oper. zone concentration. m*, j* First pass? Y (4) Place one member from j* into each team where required. N (8) Calculate team concentration weighting. in m*. (5) Remove placed members & skill group. (9) Select smallest team concentration. k* (10) Compare members from skill group j* to team k*. N Y All teams considered ? N (11) Select best match and place member in team k*. (13) All req'ts met? (12) Remove placed member & team. Y (14) Report Teams. End. Figure 3 - Balanced Placement Heuristic 27