491-210
advertisement

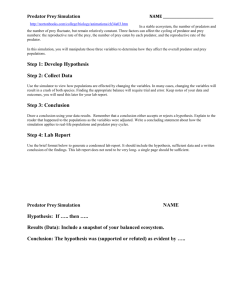
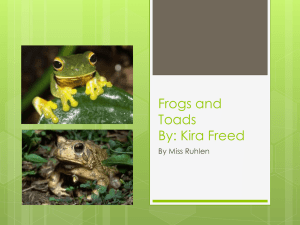
Reinforcement learning in predator-prey interactions A.TSOULARIS IIMS, Massey University, Albany, PO BOX 102 904, Auckland, New Zealand Abstract In this paper we analyse the interactions of three biological species, a predator and two types of prey, the models and mimics. The models are noxious prey that must be avoided by the predator and the mimics are palatable prey that resemble in appearance the models, thus escaping consumption. We identify the predator as a learning automaton with two actions, consume prey or ignore prey that elicit favourable and unfavourable probabilistic responses from the environment. Two kinds of environment are considered, stationary with fixed penalty probabilities and nonstationary with variable penalty probabilities. Both models and mimics are assumed to grow logistically. A benefit function is constructed for the predator that measures the consumption level at each stage of predation. Finally, strategies for increasing consumption are derived in terms of the parameters of the learning process. Keywords: learning automaton, reinforcement learning, mimics, models. 1. Introduction In this paper we analyse in detail a linear reinforcement learning algorithm designed to allow a predator (the learning automaton) to operate efficiently in terms of acceptable prey consumption in an environment occupied by palatable and unpalatable prey and characterized by a penalty probability for each predator action. The predator chooses to either ignore prey or consume prey. A learning automaton is a deterministic or stochastic algorithm used in discrete-time systems to improve their performance in random environments A finite number of decisions (actions) are available to the system to which the environment responds probabilistically either favourably or unfavourably. The purpose of the learning automaton is to increase the probability of selecting an action that is likely to elicit a favourable response based on past actions and responses. Greater flexibility can be built into modelling the predatory behaviour by considering the predator as a variable-structure stochastic automaton with action probabilities being updated at every stage using a reinforcement scheme. The book by Narendra and Thathachar [1] offers a comprehensive introduction to the theory of learning automata. Linear reinforcement algorithms are based on the simple premise of increasing the probability of that action that elicits a favourable response by an amount proportional to the total value of all other action probabilities. Otherwise, it is decreased by an amount proportional to its current value. In this work we adopt the Linear RewardPenalty (LR-P) scheme as the predatory action strategy [2]. The probability updating algorithm for the two predator actions, a1 (ignore) and a2 (eat), with respective to penalty probabilities c1 and c2, is a Markov chain and has the following form: p1 (k 1) p1 (k ) 1 p1 (k ) a(k ) a1 , response is favourable, 0 1 p2 (k 1) (1 ) p2 (k ) (1) p1 (k 1) (1 ) p1 (k ) a(k ) a1 , response is unfavourable, 0 1, ( ) p 2 (k 1) p 2 (k ) 1 p 2 (k ) The expectation of the consumption probability, p2(k+1), conditioned on p2(k), is given by: 1 p 2 (k 1) E[ p 2 (k 1) | p 2 (k )] (c 2 c1 )( ) p 22 (k ) 1 (c1 c 2 ) 2c1 p 2 (k ) c1 (2) 2. Prey population growth The mimic and model populations, X and M respectively, at stage k+1 grow logistically as follows: X (k ) (1 c2 ) p2 (k ) X (k ) X (k 1) X (k ) g1 X (k )1 K1 M (k ) c2 p2 (k ) M (k ) M (k 1) M (k ) g 2 M (k )1 K 2 where g1 , g 2 are the (3) growth coefficients and K1, K2 the carrying capacities. 3. The benefit function The net expected benefit to the predator is assessed in terms of capturing a palatable mimic and the unnecessary energy expended in capturing an unpalatable model [3]. If b and c are the parameters associated with the consumption of a single mimic and model respectively, the expected net change in benefit at stage k+1 is given by B (k 1) EB(k 1) | k B(k ) bX (k ) p2 (k 1)(1 c2 ) cM (k ) p2 (k 1)c2 (4) The objective of the predator is to modify its consumption probability at stage k+1 by adjusting accordingly the learning parameters and , at stage k, so that the net change in benefit at the end of stage k+1 is maximal. 4. Stationary prey environments A stationary pey environment is one in which the penalty probabilities c1 and c2 remain. constant. In this case the consumption probability given in (2) converges to the asymptotic value: p * 2 with , c1 c2 . 2c1 (c2 c1 ) 2 (c1 c2 ) 2 4c1c2 2 2( )(c2 c1 ) (5) p2* is asymptotically stable since 1 2 (c 1 c 2 ) 2 4c 1 c 2 2 1 . The predator’s net benefit increases monotonically if the penalty probability from consuming a model remains below the proportion of benefit from mimics in the entire prey population: c2 bX (k ) bX (k ) cM (k ) for all k The maximum rate of net benefit increase is determined by the sign of the p2 (k 1) p2 (k 1) B (k 1) B (k 1) , and consequently by the sign of the derivatives, : , , 2 (6) derivatives, p 2 (k 1) p 2 (k 1) (c 1 c 2 ) p 2 ( k ) p 1 ( k ) (c 1 c 2 ) p 22 (k ) 2c 1 p 2 (k ) c 1 The following table outlines the course of action for the predator on the basis of the two penalty probabilities and the current consumption probability, provided (6) holds: Penalty probabilities c1 c2 c1 c2 c1 c 2 c1 c 2 c1 c 2 Consumption probability at stage k p 2 (k ) c1 c1 c 2 c1 p 2 (k ) p 2 (k ) Action at stage k+1 Retain the existing values of and c1 c 2 c1 Retain the existing values of but set =0 Retain the existing values of but set =0 c1 c 2 c1 p 2 (k ) c1 c 2 p 2 (k ) 1 2 0, 0 , as no further learning is necessary, and set p2 (k ) 1 Set both Retain the existing values of and Table 1. Actions for benefit improvement. 5. Nonstationary prey environments In this section we analyse the performance of the learning algorithm of the last section when each penalty probability, ci, i = 1,2, is a monotonically increasing function of the respective action probability, ai, i =1,2. We base our decision on the reasonable assumption that if the predator is ignoring all prey with a certain frequency, palatable prey amongst them are essentially ignored at a less frequent rate, and by the same token, we extend this assumption to the frequency of consumption. Thus at each stage k: c1 (k ) r1 p1 (k ), 0 r1 1 c 2 (k ) r2 p 2 (k ), 0 r2 1 The two coefficients, r1 and r2, can be interpreted respectively as the fraction of falsely avoided mimics in the proportion of overlooked prey, and the fraction of falsely consumed models in the proportion of consumed prey. Values of either factor close to 0 indicate that the predator commits either penalty infrequently, whereas values close to 1 indicate a large penalty frequency. The complementary expressions, 1 r1 and 1 r2 , may be thought of as the predatory efficiency in avoiding the wrong prey and consuming the right prey respectively. The expectation of the action probability, p2(k+1), conditioned on p2(k), is a third-order polynomial in p2(k): 3 p2 (k 1) E[ p2 (k 1) | p2 (k )] (r1 r2 )( ) p23 (k ) (3r1 2r1 r2 ) p22 (k ) (1 r1 3r1 ) p2 (k ) r1 (7) The asymptotic probability can be found as one of the three roots of the resulting cubic polynomial, based on the work of Cardan [4]. For algebraic convenience we shall confine ourselves to the case , in which case: p2 (k 1) E[ p2 (k 1) | p2 (k )] (r1 r2 ) p22 (k ) (1 2r1 ) p2 (k ) r1 (8) with r1 r2 . The scheme admits the asymptotically stable probability: p 2* r1 (9) r1 r2 The expected net change in benefit is now B (k 1) EB(k 1) | k B(k ) bX (k ) p2 (k 1) r2 bX (k ) cM (k )p22 (k 1) (10) where p22 (k 1) E p22 k 1) | p1 (k ), p2 (k ), c1 (k ), c2 (k ) p2 (k ) p1 (k ) p2 (k )(1 c2 (k )) p1 (k )c1 (k ) (1 )2 p22 (k ) p1 (k )(1 c1 (k )) p23 (k )c2 (k ) 2 We treat the learning parameter, , as the decision variable at each stage, k, that influences the magnitude of the expected change in the net benefit, at the next stage, k+1. To test whether the expected B 2 (k 1) B (k 1) 0 benefit is continually increasing we consider the partial derivative, . Since 2 B (k 1) always, if a maximum benefit is attainable at the next stage it can be found by setting 0 , and solving for the optimal : * (k ) r1 p2 (k ) bX (k 1) 2 p2 (k )r2 bX (k ) cM (k ) r r r r 1 2 1 2 2r2 bX (k ) cM (k ) p1 (k ) p2 (k ) p12 (k )r1 p22 (k )r2 p1 (k ) p2 (k ) r1 r2 p2 (k ) r1 (11) assuming p2 (k ) 0 and r1 r2 . Table 2 below states the necessary conditions on the portion of the available palatable benefit (due to mimics) in the entire prey population and the range of consumption probability for the existence of a nonnegative * (k ) . 4 Mimic benefit portion Consumption probability at stage k bX (k ) r2 2bX (k ) cM (k ) 0 p 2 (k ) r1 r1 r2 r1 r1 bX (k ) bX (k ) min , , p2 (k ) max 2r2 bX (k ) cM (k ) r1 r2 2r2 bX (k ) cM (k ) r1 r2 bX (k ) r2 2bX (k ) cM (k ) Table 2. Consumption probability range for maximum benefit increase. The following four figures display the consumption probability and the quantity x(k ) and the net benefit change for 0.5, r1 r2 0.2, p2 (0) 1.0, X (0) 100, K 1000, M (0) 500, K 2 5000. bX (k ) , 2bX (k ) cM (k ) b 2, c 1, g1 g2 2.5, Probability and ratio m(k) 1.5 1.4 Consumption probability and m(k) 1.3 1.2 1.1 1 0.9 p2(k) m(k) 0.8 0.7 0.6 0.5 0 10 20 30 40 50 60 70 80 90 100 Stage k Figure 1. The consumption probability p2 (k ) is outside the range given in table 2 for some k. 5 Net benefit change 600 Net expected change in benefit 500 400 300 200 100 0 0 10 20 30 40 50 60 70 80 90 100 Stage k Figure 2. The net benefit change oscillation in time. 6. Discussion In this paper we have explored the concept of a predator as a learning automaton feeding on prey that can be broadly categorized as either palatable (the mimics) or unpalatable (the models). The predator’s actions is to either attack the prey or simply ignore it. Each action elicits a probabilistic response from the environment that is classified as favourable or unfavourable. A response is deemed favourable if the prey consumed is of the palatable type or if the prey ignored is unpalatable and deemed unfavourable if the prey ignored is palatable or the prey consumed is unpalatable. This distinction made when ignoring prey is related to the predator’s ability to discriminate effectively against models. If the predator senses that the prey ignored is of palatable nature it will decrease the frequency of avoidance and vice versa. A suitable function has been constructed to take into account the net energetic benefit to predator. Conditions for maximal increase in benefit have been derived dependent upon the prey populations, and the key coefficients r1 and r2. We have attempted in this work to outline a simple theoretical framework for predator learning from which more comprehensive models can originate in the future. We believe that the learning automaton methodology can be a useful tool in modeling discriminatory predatory behaviour. References 1. K.Narendra, M.A.L.Thathachar, Learning Automata: An Introduction, Prentice Hall, Englewood Cliffs NJ, 1989. 2. M.L.Tsetlin, Automaton Theory and Modeling of Biological Systems, Academic Press, New York, 1973. 3. G.F.Estabrook, D.C.Jespersen, Strategy for a predator encountering a model-mimic system, The American Naturalist, 108(962) July-August 1974 443-457. 4. W.L.Ferrar, Higher Algebra, Oxford University Press, Oxford, 1962. 6