2.4 Receiver models
advertisement

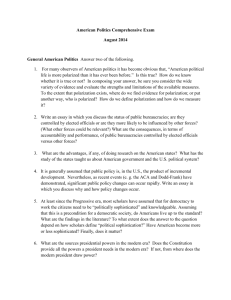
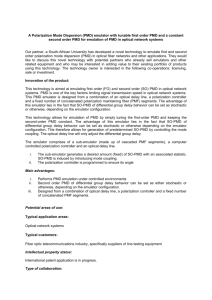
8 Chapter 2 Polarization-mode dispersion, polarization-dependent loss and receiver modeling 2.1 Polarization-mode dispersion Polarization-mode dispersion arises in single-mode fiber and fiber-optic components due to a small difference in refractive index for a particular pair of orthogonal polarization states called the fast and the slow polarization states. This property is called birefringence [31]. This index difference results in a difference in the propagation time called differential group delay (DGD) for waves traveling in these two polarization modes. In single mode fibers, the birefringence originates from a slight ellipticity of the core and from non-circularly symmetric stresses. It varies randomly from fiber to fiber because of the randomness of the geometry of the core and stress irregularities. As a result, coherent interference between the polarization modes causes the polarization-mode dispersion to vary randomly with the wavelength and ambient temperature [32]. In specially fabricated polarization maintaining (PM) fiber, the core of the fiber is exposed to an asymmetric field that is uniform along the fiber’s length. The polarization modes are maintained 9 along the fiber and energy does not couple between the modes. The polarization modes and DGD of a PM fiber are independent of wavelength. The propagation of a pulse through a long length of fiber can be very complicated since the birefringence varies randomly along the fiber [32–33]. However, there are two special orthogonal polarization states at the fiber input for which the output pulse is undistorted to first order. These two polarization states are called principal states of polarization (PSP). The PSP model was originally developed by Poole [34]. This model provides both a time domain and a frequency domain characterization of PMD. In the time domain, when a pulse is not launched in one of the two principal states, the output pulse is a combination of two delayed versions of the input pulse propagated in the two principal states, each with a fraction of the energy of the input signal. As a result the output pulse is typically broadened due to the differential group delay between the two polarization modes. In the frequency domain, a PSP is defined as the input polarization state for which the output polarization state is independent of frequency to first order. In the absence of polarization-dependent loss, the two PSPs are orthogonal to each other. For each pair of PSPs at the fiber input, there exist a corresponding pair of orthogonal PSPs at the output. The input and output PSPs are related by the fiber’s transmission matrix. PMD causes a variety of impairments in optical fiber transmission systems. One impairment is the inter-symbol interference (ISI) within a channel due to the pulse broadening that is caused by DGD when the input polarization state does not coincide with either of the two PSPs [7]. In this first-order PMD effect, a fraction of the energy of the input signal is coupled into one PSP and the rest of the energy is coupled into the other PSP. Although the pulse broadening resembles that of chromatic dispersion, the two effects 10 differ in many ways. Chromatic dispersion is a relatively stable phenomenon. The total chromatic dispersion of an optical fiber communication system is the sum of the chromatic dispersion in each of its subsections, and the location and amount of dispersion compensation can be planned in advance. In contrast, the PMD of a single-mode optical fiber at a given wavelength is not stable, forcing system designers to make statistical predictions of PMD effects and making passive compensation impossible [35]. In addition, system impairment due to second- and higher order PMD occurs for larger bandwidth signals, particularly when the PMD components combine with chromatic dispersion or signal chirp. PMD impairment also occurs in WDM systems where PMD induces coherent crosstalk between multiplexed channels [36]. In polarization-multiplexed transmission systems, adjacent channels are launched with orthogonal polarization states in order to suppress nonlinear impairments such as cross-phase modulation (XPM) or four-wave mixing (FWM). PMD destroys the orthogonality of these polarization states [37]. Impairments due to second- and higher order PMD and in WDM systems are not covered here since they are not the goal of the current work. 2.2 Polarization-dependent loss PDL is an important polarization effect in long-haul optical fiber communication systems. PDL occurs when the loss through a device depends on the input state of polarization of the signal. The combined contribution of PDL in each of the components of a system can cause large overall power fluctuations at the receiver. This in turn may seriously affect the overall system performance [13]. In general, the total PDL of several concate- 11 nated components cannot be obtained by simply adding up the individual PDLs because the PDL axes of the components are usually randomly aligned and the alignments are not stable due to the drift of the fiber realization in the fibers that connect the PDL elements [38]. However, the sum of the individual PDL values yields the worst case system PDL. In optical fiber communication systems, polarization-sensitive elements such as isolators and WDM couplers in optical amplifiers are the main source of polarizationdependent loss. The effect of PDL is to cause excess loss in one of two orthogonal polarization states. One simple method to characterize the PDL is called the maximumminimum power method. By scanning all the possible polarization states at the input of the device and determining the power variation at the output, one can calculate the ratio of the maximum power Pmax and minimum power Pmin and obtain the PDL value in dB as P PDL 10log10 max Pmin . (2.1) Typically, for a single device the PDL level can vary from a few tenths of a dB to less than a tenth of dB. In transoceanic systems, the requirement for the PDL in each EDFA is very stringent. It must be below 0.1 dB to avoid significant re-polarization of the unpolarized noise [14]. In terrestrial systems, the PDL allowed for each EDFA is higher and can be a few tenths of a dB due to the shorter propagation distance and fewer PDL elements. Although the PDL in the system does not significantly degrade the average signalto-noise ratio (SNR), it may cause large variations of the SNR [15–16]. Furthermore, by polarizing the initially unpolarized signal and noise, it can seed further degradations due to PMD. 12 2.3 Stokes representation and Poincaré sphere A polarized lightwave signal that propagates in the fiber is represented by an electric field vector that lies in a plane transverse to the direction of propagation. The state of polarization of the light is defined in terms of the curve traced out in this transverse plane by the electric field vector as a function of time or distance along the fiber. Unpolarized light can be represented by an electric field vector whose direction varies randomly in the transverse plane. For light to be regarded as unpolarized, the time required for the direction of electric field vector to randomize must be short compared to the time that it takes to measure the polarization state. This observation is important because there are telecommunications applications in which polarized light is scrambled at a rate fast enough to appear unpolarized to the optical amplifiers [39], even though in a short enough time window the light may appear partially or completely polarized. Partially polarized light can be modeled as the superposition of completely polarized and unpolarized light. The degree of polarization (DOP) is defined as DOP Ppol Ppol Punpol , (2.2) where Ppol and Punpol are the power of polarized and unpolarized light on a linear scale, respectively. In free space, the light will maintain its DOP. However, when the light propagates in an optical fiber with PMD, the DOP can decrease depending on the spectral width and the input polarization state of the signal. I now clarify the notation conventions I use for vectors in this dissertation. For Jones vectors with two components, I will use lower case bold symbols without arrows, e.g. e. For a vector with three components, I will use a capital bold symbol, e.g. S. For all vec- 13 tors with four components, I will use capital bold symbols in the font of Monotype Corsiva, e.g. S. In order to unambiguously describe a state of polarization, an explicit coordinate system must be specified. If the z-axis is the axis of propagation, then polarized light can be represented in terms of the x- and y-axis projections of the electric field vector by E x ( z, t ) E0 x cos(t x ) (2.3) E y ( z , t ) E0 y cos(t y ) , (2.4) where E0x and E0y are the amplitudes, and δx and δy are the corresponding phases. R. C. Jones [40] developed a new polarization calculus based on optical fields rather than intensities. In the Jones calculus, polarized light can be represented by a two-element complex vector. The elements of the vector specify the magnitude and phase of the x- and ycomponents of the electric field. The Jones vector takes the form Ex E0 x exp(i x ) e , E E exp( i ) y 0 y y (2.5) where E0x, E0y, δx and δy are real and represent the amplitude and the phase of each of the polarizations respectively. The transmission property of a two port optical device can be described by a complex 2 × 2 Jones matrix. The input and output of the Jones vector can be related by the Jones matrix J as eout = J ein. (2.6) Even though the Jones calculus provides a simple description of the polarization state of light in an optical fiber communication system, it is not convenient to measure the electric field of an optical signal experimentally, especially when the signal is partially polarized. Methods have been developed to express polarizations in easily measurable 14 terms, such as optical power. One widely used tool is the Stokes vector, whose components are defined in terms of the optical powers of components of the light in specific polarization states. The Stokes vector, which uniquely describes the polarization state of a signal, takes the form S1 S S2 . S3 (2.7) If S0 denotes the total power of the light, then S0, S1, S2, S3 are called the Stokes parameters. The Stokes vector is related to the Jones vector using the 2 × 2 Pauli spin matrices [41]. The meaning of the Stokes parameters is as follows: S0 = Total power, S1 = Power through linear horizontal polarizer (LHP), S2 = The Power difference between light transmitted through a linear + 45o polarizer (L + 45o) and through a linear – 45o polarizer (L – 45o), and S3 = The power difference between light transmitted through a right circular polarizer (RCP) and through a left circular polarizer (LCP). For monochromatic light, one can show that S 02 S12 S 22 S 32 . (2.8) In general, the power in the polarized part of the signal is given by Ppol S12 S 22 S 32 , (2.9) and the DOP of the signal is given by DOP S12 S 22 S 32 S0 . (2.10) 15 The Poincaré sphere is a graphical tool that allows any state of polarization to be uniquely represented in a real, three-dimensional space, on or within the unit sphere. A few special polarization states are plotted on the Poincaré sphere in Fig. 2.1. S3 RCP (0,0,1) LVP (–1,0,0) L + 45o (0,1,0) LHP (1,0,0) S2 S1 L – 45o (0,–1,0) LCP (0,0,–1) Fig. 2.1 Poincaré sphere representation of the polarized light Fully polarized light is represented by a point on the surface of the sphere. The DOP of depolarized light is less than one and its state of polarization lies within the sphere. In Fig. 2.1, circular states are at the poles, linearly polarized states are on the equator, and right-hand and left-hand elliptical states lie on the northern and southern hemisphere respectively. One important difference between the Poincaré sphere representation and the Jones space representation is that the angle between two polarization states in the Jones space representation is always half of the angle in the Poincaré sphere representation. For example, when there is no PDL in the transmission line, the PSPs are orthogonal in the Jones space representation whereas they are antipodal in the Poincaré sphere representation. 16 Since any polarization state is uniquely represented by a point on the Poincaré sphere, a continuous evolution of polarization states will trace out a smooth curve on the Poincaré sphere. When a single pulse is launched into a piece of PM fiber with negligible second- and higher order PMD, the signal power is coupled to the two principal polarization states. Their relative powers are determined by the launching angle between the SOP of the signal and the principal states of the fiber. At the output of the PM fiber, the pulses in each of the principal states are offset from each other by an amount given by the DGD of the PM fiber. On an oscilloscope, one can see two pulses on two sides of the center of the bit slot with a delay of one half of the DGD relative to the center. On the Poincaré sphere, the SOP of the signal as a function of time will be located at one of the two principals states at times when the power in one principal state is small compared to the power in the other. At times when both principal states are present, the SOP of the signal may transition from one PSP to the other along an arc of a great circle, as shown in Fig. 2.2. DGD S1 PSP+ S0 S3 PSP– S2 Center of bit slot S1 (a) (b) Fig. 2.2 (a) SOP of the output pulse as a function of time. (b) Normalized SOP as a function of time on the Poincaré sphere. 17 In Fig. 2.2, I simulated the SOP of a single pulse after propagation through a PM fiber with 57 ps of DGD. The PMD-induced depolarization of the output pulse can be seen in Fig. 2.2(a) and (b) as large variations of the Stokes vector (S1, S2, S3) as a function of time. In Fig. 2.2 (a), the left half of the bit slot is filled mostly with the energy from one principal mode and the right half of the bit slot is filled with the other principal mode. The transition of the SOP of the signal from one principal state to the other principal state happens at the center of the bit slot. This large variation of the Stokes vector across the bit slot is one of the fundamental differences between pulse distortions induced by chromatic dispersion and by PMD. Fig. 2.2 will be very useful in later chapters to help understand the performance variation caused by pulse distortion induced by PMD and partially polarized noise induced by PDL. 2.4 Receiver models 2.4.1 System performance measures Fiber optic systems consist of three major subsystems: the transmitter, the transmission path, and the receiver. These subsystems jointly determine the system performance and they are all critical in the design of a fiber optic system. In particular, the system performance is evaluated at the receiver. Given a transmitter and a transmission path, an important task is to design a receiver to maximize the system performance. To achieve this goal, one must identify the transmission impairments and design a receiver to minimize the effects that these impairments have on the system performance. Much work has been done on optical receivers, including the comparison of different modulation formats, re- 18 ceiver optimization and studies of receiver sensitivity [22–30]. The most widely used parameter to characterize the system performance is the bit-error ratio (BER). Typically, optical fiber transmission systems are designed and operated at a BER below 10–12. This BER limit can be raised to 10–4 if forward-error correction codes are used [42]. However, to reduce the possibility of exceeding the BER limit, practical systems always operate substantially below the BER limit. As a result, direct BER measurement may require hours of transmission experiments [42] and direct BER computation may take days of standard Monte Carlo simulations [43]. Alternatively, another widely used performance measure is the Q-factor. The Q-factor is a function of the mean and standard deviation of the received currents in the marks and spaces and it is often defined as [44] Q where i1 and i1 i0 1 0 , (2.11) i0 are the mean and 1 and 0 are the standard deviation in the marks and spaces respectively. The measurement and computation of the Q-factor is much less time consuming than that of BER. When the electric currents in the marks and spaces are both Gaussian-distributed, the Q-factor is a good estimate of the BER and is related to the BER by BER erfc( Q / 2 ) / 2 exp( Q 2 / 2) /( 2 Q) . (2.12) Although the actual distributions of the marks and spaces are generalized χ2 distributions, the Q-factor is still a good estimate of BER when the BER is not too low [42]. Both the BER and the Q-factor depend on the characteristics of the receiver, the polarization state of the signal and the noise, and on the shape of the optical pulses after transmission. 19 2.4.2 Previous receiver models Receiver studies in optical fiber communication systems were first conducted more than two decades ago [45]. In the early 1990s, Marcuse [22, 46] derived the bit error probability of binary OOK signals for a simple system in a closed analytical form. In his work, the optical filter has a rectangular shape and its bandwidth is wide enough to let the signal pass undistorted. This assumption is not valid in modern systems with narrow optical filters that have bandwidths as small as 10 GHz. In fact, studies [25,29] have shown that the optimum bandwidth of the optical filter has to be narrow enough to reduce the ASE noise that enters the receiver as much as possible without significantly attenuating the amplitude of the signal. One important assumption in his work is that the signal is polarized and the optical noise is either unpolarized or completely polarized and copolarized with the polarization state of the signal. These assumptions do not hold for optical fiber transmission systems in which PMD and PDL induce penalties. Although Marcuse only dealt with simplified signals and receiver structures, his work represents a milestone in receiver modeling and has been widely referenced by other researchers [25, 30, 47–49]. More recently, Winzer et al. [25] performed a comprehensive study of receivers. They compared the receiver sensitivities of return-to-zero (RZ) and non-returnto-zero (NRZ) modulation formats using realistic optical and electrical filter shapes and analyzed the impact of degrading effects on receiver sensitivities and optimum receiver bandwidths, including finite extinction ratio, chirp and optical-carrier fluctuations. They also compared the performance of RZ and NRZ formats in the presence of first-order PMD. However, their work does not account for partially polarized noise and their experimental results showed large scatter compared to his simulation results [50]. 20 Important work that is closely related to my study was conducted by Lima, et al. [27– 30] and Sun, et al. [20]. Lima, et al. generalized Marcuse’s and Humlet and Azizoglu’s results by deriving a formula for the Q-factor as a function of the optical signal-noiseratio (OSNR) for arbitrary pulse shapes, realistic receiver filters and arbitrarily polarized noise. In this part of their work, the effect of PMD on the signal is assumed to be negligible. They also studied the case where the signal is depolarized by PMD; however in this case they assumed that the optical noise is unpolarized. Sun, et al. [20] derived an expression for the distribution of the Q-factor for a fixed signal-to-noise ratio and a fixed SOP of the signal when the angle between the SOP of the signal and the polarized part of noise is randomly varied. They also conducted an experimental study of the effect of partially polarized noise on the system performance at the receiver in a back-to-back system. In this work, the system was not impaired by PMD. In this study, I will extend the work of Lima, et al. and Sun, et al. by studying the combined effects that a depolarized signal due to PMD and partially polarized noise due to PDL have at the receiver. In particular, I will derive a theoretical formula for calculating the Q-factor that accounts for such combination of polarization effects. In comparison to calculating the system performance using Monte Carlo simulations or by conducting experiments, the analytical formula has two advantages. First, it can significantly reduce the cost of long computation and measurement times. Second, it can be used to understand exactly how and when the system performance is affected by polarization effects. I will validate the results by comparing the results obtained from experiments and Monte Carlo simulations using the formula. I will show that, even with a fixed OSNR, the performance of the system can vary widely, depending on the power splitting ratio of the 21 signal, the DOP of the noise and on the relation between the polarization states of the signal and the polarized part of the noise. This receiver model can be used in any on-off keyed (OOK) system in which the PMD and PDL induce significant performance impairments.