Output
advertisement

CHANNEL/SYSTEM IDENTIFICATION USING
TOTAL LEAST MEAN SQUARES ALGORITHM
by
Viput Subharngkasen
Final Project
in
ECE 539
Introduction to Artificial Neural Network
and Fuzzy systems
ABSTRACT
The Total Least Mean Squares (TLMS) algorithm is recursive technique used to identify
transfer function of unknown systems by using input and output data, which is corrupted by
noise. This paper evaluates the accuracy and stability of the TLMS algorithm. The TLMS
algorithm demonstrates a better performance over the Least Mean Square (LMS) and Total Least
Square (TLS) algorithms. It provides accurate results and faster computational time as compared
to conventional approaches.
2
TABLE OF CONTENTS
I.
INTRODUCTION ………………………………………………………… 1
II.
REVIEW OF LITERATURE ……………………………………………... 4
Least Mean Squares (LMS) algorithm ……………………………. 4
Total Least Mean Squares (TLMS) algorithm ……………………. 8
III.
METHODOLOGY ………………………………………………………... 12
Part I ……………………………………………………………….. 12
Part II ……………………………………………………………… 13
IV.
RESULTS …………………………………………………………………. 15
Part I ……………………………………………………………….. 15
Part II ……………………………………………………………… 19
V.
DISCUSSION ……………………………………………………………... 22
VI.
CONCLUSION ……………………………………………………………. 25
VII.
REFERENCE ……………………………………………………………… 26
APPENDIX A ……………………………………………………………………... 27
APPENDIX B ……………………………………………………………………... 31
3
I. INTRODUCTION
In the adaptive signal processing, the adaptive linear combiner is the simplest and the
most widely used method. The basic properties of the adaptive linear combiner system are time
varying and self-adjusting performance. Thus, the adaptive linear combiner systems are
adjustable, and their adaptations usually depend upon the average values of finite-duration of
input rather than upon the instantaneous values of the input. The adaptive system can be used in
various applications such as the prediction application, the inverse modeling application, the
interference canceling application, the channel equalization application, and the system
identification application.
In the system identification application, the Least Mean Squares (LMS) algorithm is
widely used to determine the transfer function of an unknown system. By using inputs and
outputs of that system, the LMS algorithm is applied in an adaptive process based on the
minimum mean squares error. The LMS algorithm is the unsupervised learning algorithm,
which is used to extract some features from data. The LMS algorithm can be used with both
stationary and non-stationary signal processing. In the situation of having no interference in both
inputs and outputs or having interference only in the outputs of the unknown system, the LMS
algorithm’s results can always achieve the optimal solution. However, if the interference exists
in both the input and the output of the unknown system, the LMS algorithm’s results can obtain
only the sub-optimal solution for that unknown system.
1
The Total Least Squares (TLS) algorithm, proposed in 1901, is also used in the adaptive
signal processing to identify the impulse response of the unknown system. The solutions of the
TLS algorithm can be determined by minimizing the Frobenius norm of the cascaded matrix
between the input interference matrix and output interference matrix. The results of this
minimization can be achieved from the singular value decomposition (SVD) of that combined
matrix. The results of the TLS algorithm are based on the assumption that the interference in the
input and output are independent of each other. The computation time of the TLS algorithm is
substantially time consuming; for example, the N-by-N matrix is 6N3 per iteration. The TLS
algorithm’s performance, which is the same as the LMS algorithm’s performance, cannot be
used to find the global optimal solution for the situation if the interference exists in both the
input and the output signals of that system.
One of the ways to find the optimal solution of the impulse response of the unknown
system when it has the interference presented in both the input and the output is by using the
Total Least Mean Squares (TLMS) algorithm. Instead of basing the approach on the minimum
mean squares error as the LMS algorithm does, the TLMS algorithm is based on the total least
mean squares or the minimum Raleigh quotient approach. Like the LMS algorithm, the TLMS
algorithm is the unsupervised learning algorithm. The TLMS algorithm was derived from Oja
and Xu’s learning algorithm, which is used for extracting only the minor features from the data
sequence, unlike the LMS algorithm. By extracting only the subsidiary information, the effect of
the interference can be eliminated. Moreover, the TLMS algorithm has also an advantage over
the Total Least Squares (TLS) algorithm in the computation time. The TLMS algorithm’s
2
computation time for N-by-N matrix is 4N per iteration, whereas the TLS algorithm’s is 6N3 per
iteration.
In this paper, I developed the methodology for making comparisons between the LMS
and TLMS algorithm. These comparisons will help to prove the accuracy of the two methods.
In addition, it will also show the different results for both methods from the ideal solution.
3
II. REVIEW OF LITERATURE
Least Mean Squares (LMS) algorithm
The LMS algorithm is very useful and easy to compute. The LMS algorithm will
perform well, if the adaptive system is an adaptive linear combiner, as well as, if both the ndimensional input vector X (k) and the desire output d (k) are available in each iteration, where X
(k) is
x1 (k )
x (k )
X (k ) 2
x n (k )
and the n-dimensional corresponding set of adjustable weights W(k) is
w1 (k )
w (k )
W (k ) 2
wn (k )
By having the input vector X (k), the estimated output y (k), can be computed as a linear
combination of the input vector X (k) with the weight vector W (k) as
y(k ) X T (k )W (k )
Thus, the estimated error e (k), the difference between the estimated output y (k), and the desired
signal d (k), can be computed as
e(k ) d (k ) y(k ) d (k ) X T (k )W (k )
4
From a mathematics perspective, to find the optimal solution is to minimize the E {e2
(k)}, whereas E {.} is the expectation value. In order to find the minimum value of e2(k), lets
expand the e2 (k), and get
e 2 (k ) d 2 (k ) 2 d (k ) X T (k )W (k ) W T (k ) X (k ) X T (k )W (k )
After that, take the expectation value for both sides of the equation,
E{e 2 (k )} E{d 2 (k )} 2 E{d (k ) X T (k )}W (k ) W T (k ) E{ X (k ) X T (k )}W (k )
Let R be defined as the autocorrelation matrix as
R E{ X (k ) X T (k )}
and also let P be defined as
P E d (k ) X T (k )
Thus, E{ e2(k) } can be rewritten as
E{e 2 (k )} E{d 2 (k )} 2 P T W (k ) W T (k ) RW (k )
Since the LMS algorithm is the descending on the performance surface algorithm. Therefore, we
use e2(k) to estimate the gradient vector,
(k )
e 2 (k )
2 e(k ) X (k )
W (k )
From the steepest descent type of adaptive algorithm.
W (k 1) W (k ) (k )
Replace (k), we get
W (k 1) W (k ) 2e(k ) X (k )
Substitute e(k), we get
5
W (k 1) W (k ) y(k ) d (k )X (k )
This equation is the LMS algorithm, which uses the difference between the desired signal
d(k) and the estimated output y (k) to drive each weight tap to find the impulse response of the
unknown system. W(k) is the present value of weight and W(k+1) is the new value, which
eventually will be converted. The parameter is a positive constant that controls the rate of
convergence and the stability of the algorithm, called the learning rate. The value of the learning
rate has to be smaller than 1/2max, where max is the largest eigenvalue of the correlation
matrix, R, or the learning rate can be selected as small as possible to make sure that the
algorithm will be converted. The smaller the learning rate is employed, the longer the training
sequence needs to be.
Input
X (k)
Weight
W (k)
x1
W1k
Desire Signal
d(k)
k
x2
W2k
+
+
+
_
Sum
k
+
xn
Sum
Output
Y(k)
+
Error
E(k)
Wnk
k
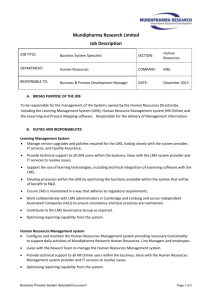
Figure 1: LMS algorithm diagram
From the LMS algorithm diagram in figure 1, the estimated output Y(k) is computed from
a linear combination of the input signal, X(k) and the weight vector, W(k). The estimated output
6
y(k) is then compared to the desired output, d(k), to find the error, e(k). If there is any difference,
the error signal will be used as a feedback mechanism to adjust the weight vector W(k). On the
other hand, if there is no difference between these signals, it means that no adjustment is needed,
since the estimated output is desirable.
7
Total Least Mean Squares (TLMS) algorithm
Let Z(k) be the augmented vector of the input vector, X(k), and the desired output, d(k)
Z (k ) X (k ) T | d (k )
T
x1 (k )
x (k )
2
x n (k )
d (k )
Assume that interference exists in both the input and the output called X(k) and d(k)
respectively. Also, define the augmented interference vector as Z(k)
Z (k ) X (k ) T | d (k )
T
x1 (k )
x (k )
2
x n (k )
d (k )
Thus, the augmented observation vector can be shown as
~ T
~
~
Z (k ) Z (k ) Z (k ) X T (k ) | d (k )
where
~
X ( k ) X ( k ) X ( k )
~
d (k ) d ( k ) d ( k )
Recall that the weight vector W(k) is
8
~
x1 (k )
~
x 2 (k )
~
x n (k )
~
d (k )
W1 (k )
W (k )
W (k ) 2
Wn (k )
Therefore, let the augmented weight vector to be
~
W (k ) W (k ) T | Wn 1
T
W1 (k )
W (k )
2
Wn (k )
Wn 1 (k )
In the TLMS algorithm, the estimation of the desired output, y(k), can be expressed as a
linear combination of the input, X(k), and the weight vector, W(k), as shown in the LMS
algorithm as
y (k ) X T (k ) W (k )
To find the optimal solution, the effect of the interference has to be minimized. Thus,
min E X T (k ) | d (k )
2
min E Z (k )
2
x1 (k )
x 2 (k )
min E
x (k )
n
d (k )
2
where || . ||2 is the Euclidean Distance. The above equation can also be achieved through the
minimization of
~ 2
~T
min E
X (k )WTLMS d (k )
2
~
~
min E Z T (k )W (k ) Subject to W (k )
9
2
Note in the above equation that WTLMS is changed in each iteration, and can be any positive
constant.
When the equation is expended, we get
~
~ ~
~
min E W T (k ) Z (k ) Z T (k )W (k )
~
~
min E W T (k ) RW (k )
where R is the augmented correlation matrix
~ ~
R E Z (k ) Z T (k )
~
~
According to LaGrange expansion, min E W T (k ) RW (k ) can be expressed as
~
~
~
J W T (k ) RW (k ) W (k ) 2
where is a constant.
Next, in order to find the minimum value of J, use the differentiation technique
J
~
2 RW (k ) 0
~
W (k )
Hence, the solution of this optimization problem is the eigenvector, which relates to the
smallest eigenvalue of the augmented correlation matrix.
Referred to the LMS algorithm, the search equation for finding the eigenvector of the
augmented correlation matrix R is
~
~
~
~
W (k 1) W (k ) [W (k ) W (k )
2
2
~
RW (k )]
where k is an iteration number. The parameter is a positive constant that controls the rate of
convergence and the stability of the algorithm. The augmented correlation matrix R is a positive
10
definite matrix, thus, it makes the term ||W(k)||22 RW(k) be a higher order decay term. Hence, the
weight vector, W(k), is bounded.
Recall that the augmented correlation matrix R is
1
~ ~
R E Z (k ) Z T (k )
M
M
~
~T
Z (k ) Z
(k )
k 1
where M is the total number of samples. However, in the TLMS algorithm, we take each
Z(k)ZT(k) value as an augmented correlation matrix in each iteration. In addition, we can also
rewrite the searching equation as
~
~
~
Y (k ) Z (k ) T W (k )
~
~
~
~
W (k 1) W (k ) W (k ) W (k )
2
2
~ ~
Y (k ) Z (k )
The above equation is the TLMS algorithm that will be used in the simulation processes
in this study. As a final note, the value of the constant , it has to be very small in order to make
ensure that the TLMS algorithm is converted. However, if we pick the value of too small, the
algorithm will need a lot of training sequences to make it converted.
11
III. METHODOLOGY
Part I
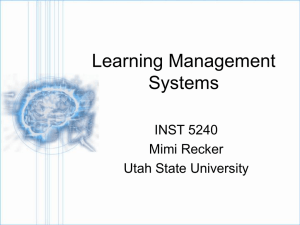
By using the inputs and the outputs of the unknown system, the Least Mean Squares
(LMS) and the Total Least Mean Squares (TLMS) algorithms are employed to identify the
impulse response. In this simulation, the inputs and the outputs that are corrupted with zero
mean Gaussian Noise are used. First, we apply the signals with signal to noise ration (SNR)
equal to 10 dB into the algorithm while the lengths of the input and the output samples are varied
from 1,000 to 100,000 samples. Next, the LMS and TLMS algorithms are used to compute the
transfer function of the unknown system at each length of the samples (see figure 2).
Start
Number of samples =
1,000
Increase number
of samples
Use TLMS and LMS
algorithm to compute
the transfer function
No
100,000
Samples
Find the average of the
last 100 results
Find Error
Error = ||HAverage - HIdeal ||2
Yes
Plot the Error of TLMS
and LMS algorithm
Vs the number of sample in
semilog graph
End
Figure 2: The flow chart shown the simulation process
for each SNR in the methodology part I
12
The last 100 results were averaged. Then, the error of each of the averaged results
compared with the ideal situation are computed by the following formula
Error H Average H Ideal
2
where || . ||2 is the Euclidean Distance or norm.
The results of the errors at each SNR are shown in semi-logarithm graphs in which the Yaxis represents the number of samples used in the simulations, and the X-axis represents the
errors in dB. The processes are repeated for different SNR: 5, 2, 0, and –2 dB.
Part II
To better demonstrate the ability and stability of the TLMS algorithm over the LMS
algorithm, the fixed number of inputs and outputs at 50,000 samples were used in the 2nd
simulation. These inputs and outputs are also corrupted with Gaussian Noise. In addition, fixed
SNRs at 10, 5, 2, 0, and –2 dB are used respectively. As in the part one, the simulation begins
with SNR equal to 10 dB. The averages of the last 100 results were computed for both the LMS
and the TLMS techniques. After that, we repeated the simulation and computation 50 times in
order to find the true averages and variances of the result (see figure 3). All processes were
repeated for the different SNRs and the results computed at the different SNRs were compared to
the ideal solution in a table format.
13
Start
Number of samples
=50,000
Use TLMS and LMS
algorithm to compute
the transfer function
No
Repeat for
50 times
Find the average of the
last 100 results
Find Error
Error = ||HAverage - HIdeal ||2
Yes
Compute average
of the average
and its variance
End
Figure 3: The flow chart shown the simulation process
for each SNR in the methodology part II
14
IV. RESULTS
Part I
In the first simulation, I used the TLMS and LMS algorithms to find the transfer function
of an unknown system from the varied length of inputs and outputs. As mentioned in the
methodology section, the last 100 values of the results are used to compute the averages, which
represent the computation of the TLMS and LMS algorithms for each number of samples. In
order to determine the performance of the TLMS and LMS algorithms, we have to find the errors
between the averaged results of both algorithms and compare those to the ideal solution for every
number of samples. The error can be computed by
Error 20 log H Average H Ideal
2
where || . ||2 is the Euclidean distance. At each SNR, the error of both LMS (- -) and TLMS (--)
algorithms are shown in semi-logarithm graphs in which the Y-axis represents the number of
samples, and the X-axis represents the errors in dB (see figure 5-9).
According to the error plots, we can see that the TLMS algorithm’s performance is better
than the LMS algorithm’s performance after being subjected to enough training sequences. In
this simulation, the enough training sequences are about 20,000 samples. Moreover, the errors
appear to convert after being subjected to 50,000 samples of training sequences for the TLMS
algorithm. However, after the errors were converted, the error plots of both the LMS and TLMS
algorithms still fluctuate. For the TLMS algorithm, the error plots appear to move back and forth
15
between the ranges of –10dB to -25 dB. For the LMS algorithm, the error plots appear to swing
around 0 to 5 dB
Error of TLMS Vs Error of LMS in Noise 10 db
10
Error LMS
Error TLMS
5
0
Error in dB
-5
-10
-15
-20
-25
-30
0
1
2
3
4
5
6
Number of samples
7
8
9
10
x 10
4
Figure 5: The error of TLMS and LMS algorithm
Vs the number of samples at SNR = 10 dB
16
Error of TLMS Vs Error of LMS in Noise 5 db
20
Error LMS
Error TLMS
15
10
Error in dB
5
0
-5
-10
-15
-20
-25
-30
0
1
2
3
4
5
6
Number of samples
7
8
9
10
4
x 10
Figure 6: The error of TLMS and LMS algorithm
Vs the number of samples at SNR = 5 dB
Error of TLMS Vs Error of LMS in Noise 2 db
15
Error LMS
Error TLMS
10
5
Error in dB
0
-5
-10
-15
-20
-25
0
1
2
3
4
5
6
Number of samples
7
8
9
10
4
x 10
Figure 7: The error of TLMS and LMS algorithm
Vs the number of samples at SNR = 2 dB
17
Error of TLMS Vs Error of LMS in Noise 0 db
20
Error LMS
Error TLMS
15
10
Error in dB
5
0
-5
-10
-15
-20
0
1
2
3
4
5
6
Number of samples
7
8
9
10
4
x 10
Figure 8: The error of TLMS and LMS algorithm
Vs the number of samples at SNR = 0 dB
Error of TLMS Vs Error of LMS in Noise -2 db
25
Error LMS
Error TLMS
20
15
Error in dB
10
5
0
-5
-10
-15
-20
0
1
2
3
4
5
6
Number of samples
7
8
9
10
4
x 10
Figure 9: The error of TLMS and LMS algorithm
Vs the number of samples at SNR = -2 dB
18
Part II
According to the 2nd simulation, I developed a method to compare the ability and the
stability of the TLMS algorithm and the LMS algorithm. The fixed numbers of input samples
are used. The simulations in part one show that the TLMS algorithm’s results have already been
converted after 50,000 samples are used. Thus, I used 50,000 samples in this simulation to
ensure the conversion of the TLMS algorithm. Like the first simulation, the last 100 converted
results are employed to compute the averages, which represent the results of the TLMS and LMS
algorithms. In order to find the true average and the variance of the computed results, I repeated
the simulation 50 times, and computed the average of those 50 averages and variances.
Afterwards, the whole process (see figure 3) is repeated for the different SNRs to determine the
averages and the variances. The results of each SNR are shown in the table 1.
According to table 1, the averages computed from the TLMS algorithm are much closer
to the ideal solution than the results computed from the LMS algorithm. When the SNR is equal
to 10 dB, the average weight computed from the LMS algorithm starts to deviate from the ideal
weight. For the rest of the SNRs, the results derived from the LMS algorithm continue to deviate
away from the ideal transfer function. However, the results of the TLMS algorithm, unlike the
LMS algorithm, were close to the ideal situation even at the low SNR. Furthermore, the
variances of the averages computed from both the TLMS and the LMS algorithm are
considerably small; most of the variances are less than 0.01. Meaning that for each algorithm the
computed averages are close to each other and to its mean.
19
Table 1: The TLMS and LMS average weights and their variances
SNR
Average Weight
10 dB
H1 = [-0.3003, -0.9016, 0.8091, -0.7046, 0.6180]
Var1 = [0.0020, 0.0035, 0.0028, 0.0028, 0.0026]
H2 = [-0.2270, -0.6757, 0.6033, -0.5262, 0.4583]
Var2 = [0.0038, 0.0023, 0.0025, 0.0032, 0.0023]
H1 = [-0.3054, -0.9014, 0.7969, -0.7044, 0.5966]
Var1 = [0.0024, 0.0032, 0.0044, 0.0030, 0.0033]
H2 = [-0.1977, -0.5550, 0.4932, -0.4351, 0.3714]
Var2 = [0.0053, 0.0039, 0.0037, 0.0049, 0.0049]
H1 = [-0.2924, -0.9080, 0.8053, -0.7016, 0.6054]
Var1 = [0.0038, 0.0049, 0.0052, 0.0055, 0.0041]
H2 = [-0.1538, -0.5097, 0.4336, -0.3777, 0.3291]
Var2 = [0.0051, 0.0054, 0.0046, 0.0055, 0.0050]
H1 = [-0.3148, -0.8988, 0.7875, -0.6937, 0.6152]
Var1 =[0.0030, 0.0043, 0.0049, 0.0048, 0.0039]
H2 = [-0.1678, -0.4230, 0.3912, -0.3481, 0.3209]
Var2 = [0.0050, 0.0043, 0.0069, 0.0059, 0.0039]
H1 = [-0.2983, -0.8934, 0.8041, -0.6942, 0.5920]
Var1 =[0.0051, 0.0057, 0.0050, 0.0046, 0.0047]
H2 = [-0.1384, -0.3882, 0.3428, -0.3088, 0.2382]
Var2 = [0.0090, 0.0085, 0.0080, 0.0095, 0.0065]
H1 = [-0.2966, -0.8950, 0.7934, -0.7026, 0.5984]
Var1 = [0.0039, 0.0099, 0.0069, 0.0056, 0.0044]
H2 = [-0.0869, -0.3227, 0.2699, -0.2470, 0.2173]
Var2 = [0.0105, 0.0106, 0.0102, 0.0097, 0.0072]
5 dB
2 dB
0 dB
-2 dB
-5 dB
Variance of average weight
Notes:
1. Ideal transfer function = [ -0.3, -0.9, 0.8, -0.7, 0.6 ]
2. Number of samples = 50,000
3. TLMS = 0.001
4. LMS = 0.001
5. H1 = TLMS average weight
6. H2 = LMS average weight
20
7. Var1 = Variance of TLMS weight
8. Var2 = Variance of LMS weight
21
V. DISCUSSION
According to the results shown in the previous section, the performance of the Total
Least Mean Squares (TLMS) algorithm is superior to the Least Mean Squares (LMS) algorithm.
From figure 5-9, the errors resulted from the TLMS algorithm are minimized after using 30,000
samples, where the LMS algorithm’s errors can not be minimized even though the larger
numbers of samples are used. Recall that in these simulations 100,000 samples are employed.
When the SNR is decreased, the errors of both the TLMS and LMS algorithms are
increased. Although, the errors of both methods are increased, only the errors of the TLMS
algorithm are eventually minimized to the acceptable value. The errors resulted from the TLMS
algorithm are averaged around –15dB which is considerably negligible, while the errors
computed from the LMS algorithm are averaged around 0 dB.
As shown in figure 5-9, the errors of the simulations fluctuate. This variation is due to
the nature of the Gaussian interference. To reduce this effect, more simulations are needed in
order to find the true average result. As a consequence, the simulation in part two were
developed. From part one, I learned that the errors of the TLMS algorithm are converted after
being subjected to 50,000 training samples. Therefore, we use 50,000 samples for the 2nd
simulation. In order to find the true averages of the results, the simulation needed to be repeated
50 times as mentioned in the methodology section.
22
In table 1, the results show that the averages computed from the TLMS algorithm are
closer to the ideal solution than the results computed from the LMS algorithm. The variances of
both algorithms are significantly small, which means the averages of both algorithms do not vary
much from each other and its mean. These small variances strengthen the stability of both
algorithms. However, the TLMS algorithm has smaller variances than the LMS algorithm, this
implies that the TLMS algorithm has more stability in computation over the LMS algorithm.
Although the LMS algorithm gives a small value of variances, the average results still
significantly deviate away from the desired value. As mentioned in the introduction section, the
nature of the LMS algorithm is used to extract information from the input signals. However, due
to the heavy noise corruption in the signals, the LMS algorithm cannot extract the information
since the algorithm extracts the noise effects from the signal instead of the original information
(input signals). Therefore, the LMS algorithm results in poor performance.
On the other hand, the TLMS algorithm provides even a smaller value of variances and
its average results are very much closer to the ideal solution. Because the TLMS algorithm,
unlike the LMS algorithm, extracts only the minor features from the signals, the TLMS
algorithm shows a better performance over the LMS algorithm in both the ability and the
stability aspects. Consequently, the TLMS algorithm is recommended for applying in the system
identification applications in most situations.
In general, when no interference is involved, both the TLMS and LMS algorithms can be
used to achieve the global optimal solution. However, the LMS algorithm’s computation time is
23
slightly faster than the TLMS algorithm. On the contrary, when the interference is presented,
only the TLMS algorithm shows the desired results, whereas the LMS algorithm offers
unacceptable solutions (see table 1).
One of the difficulties in using the TLMS algorithm is how to choose the appropriate
value of the learning rate, . If the selected is too small, the TLMS algorithm needs a
substantial number of samples to make the algorithm convert. However, if the value is too
large, the algorithm will fail to convert. For that reason, we need to trade off between the value
of the learning rate, , or the number of samples used in the simulation. As a result, I
recommend in a further study that search should be conducted to discover the best way to select
the appropriated learning rate in order to utilize the efficiency of the TLMS algorithm.
24
VI. CONCLUSION
The Total Least Mean Squares (TLMS) Algorithm is the unsupervised learning adaptive
linear combiner based on the total least mean squares or the minimum Raleigh quotient, which is
used to extract minor features from training sequences. This algorithm can be best used in
situations when there is interference presented in both the input and output signals of the system.
According to the simulations in this study, I found that the TLMS algorithm provides better
ability and stability and a more accurate way to identify the transfer function of the unknown
system than the LMS algorithm does. In addition, the TLMS algorithm’s computation time, 4N
per iteration, is also faster than the TLS algorithm’s, 6N3 per iteration. However, one of the
problems of using the TLMS algorithm is the difficulty of selecting the suitable learning rate, .
In conclusion, the advantages of using the TLMS algorithm are its ability to perform in a system,
which is heavily corrupted with noise, and the stability of its results.
25
VII. REFERENCES
1. Abatzoglou, T.J., Mendel, J.M., and Harada G.A. (1991), The Constrained Total Least
Squares Technique and its Application to Harmonic Supersolution, IEEE Transactions on
Signal Processing, vol. 39, pp. 1053-1086.
2. Feng, D.Z., Bao, Z., and Jiao, L.C. (1998) Total Least Mean Squares Algorithm, IEEE
Transactions on Signal Processing, vol. 46, pp. 2122-2130.
3. Mendel, J.M. (1995). Lessons in Estimation Theory for Signal Processing, Communications,
and Control. Englewood Cliffs, NJ: Prentice-Hall.
4. Proakis, J.G., Rader, C.M., Ling F., and Nikias, C.L. (1992). Advanced Digital Signal
Processing. Macmillan, NY: Macmillan.
5. Widrow, B. and Stearns, S.D. (1985). Adaptive signal processing. Upper Saddle River, NJ:
Prentice-Hall.
26
APPENDIX A
Part1: The simulation in Methodology part1
This program uses the TLMS and LMS algorithms to identify the system (Hi), which is
corrupted with noise at SNR equals to s. This program simulates from 1,000 data to
maximum data. The results are transfer function computed by the TLMS and LMS
algorithms including their errors, and also a plot shows the relation between errors and
number of samples at selected SNR.
Input
Hi : Transfer function used in the simulation.
s : Signal to Noise Ratio.
maxnum : Maximum number in the simulation.
u_tlms : The learning rate of the TLMS algorithm.
u_lms : The learning rate of the LMS algorithm.
Output
h1 : Transfer function computed from the TLMS algorithm.
h2 : Transfer function computed from the LMS algorithm.
e1 : Error in dB of the TLMS algorithm's results.
e2 : Error in dB of the LMS algorithm's results.
27
function [h1,h2,e1,e2] = part1(Hi,s,maxnum,u_tlms,u_lms)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Part1 : The simulation in Methodology part1
%
Find the error of the TLMS and LMS algorithms Vs
%
the number of samples at the different SNRs.
%
% Input
%
Hi : Transfer function used in the simulation.
%
s : Signal to Noise Ratio.
%
maxnum : Maximum number in the simulation.
%
u_tlms : The learning rate of the TLMS algorithm.
%
u_lms : The learning rate of the LMS algorithm.
%
% Output
%
h1 : Transfer function computed from the TLMS algorithm.
%
h2 : Transfer function computed from the LMS algorithm.
%
e1 : Error in dB of the TLMS algorithm's results.
%
e2 : Error in dB of the LMS algorithm's results.
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Ideal System
H_Ideal = Hi;
% Signal to Noise ratio
SNR = s
% Maximum number of the simulation
MaxNumber = maxnum
% Learning rate for TLMS and LMS algorithms
mu_tlms = u_tlms
mu_lms = u_lms
% Number of sample using in the simulation
num1 = 1000:1000:9000;
num2 = 10000:2000:MaxNumber;
Number = [num1, num2];
t = length(Number);
Taps = length(H_Ideal);
PP = 1;
Last = 50;
AA = eye(Taps);
AA = [AA, zeros(Taps,1)];
H_TLMS = [];
H_LMS = [];
Error_TLMS = [];
Error_LMS = [];
for i = 1:length(SNR),
28
for j = 1:t,
Signal = PP*randn(1,Number(j));
% Find the Power of the Signal
Power = 0;
for k = 1:Number(j),
Power = Power + Signal(k)^2;
end
Power = Power/Number(j);
% Noise
% SNR = 20 log(Px/No)
% No = Px*10^(-SNR/20)
No = Power* 10.^(-SNR/10);
% Ideal Signal come out of the system
DesireSignal = conv(H_Ideal,Signal);
Signal = Signal + No*randn(1,Number(j));
DesireSignal = DesireSignal +
No*norm(H_Ideal)^2*(randn(1,length(DesireSignal)));
% Beginning the weight with random number
h_tlms = zeros(Number(j)-Taps+1,Taps+1);
h_tlms = [randn(1,Taps+1)/10; h_tlms];
h_lms = zeros(Number(j),Taps);
for k = 1:Number(j)-Taps+1,
X = [];
for q = 1:Taps,
X = [X; Signal(k+Taps-q)];
end
Z = [X; DesireSignal(k+Taps-1)];
Y = Z'*h_tlms(k,:)';
h_tlms(k+1,:) = h_tlms(k,:) + mu_tlms*(h_tlms(k,:) norm(h_tlms(k,:))*Y*Z');
Error = DesireSignal(k+Taps-1) - h_lms(k,:)*X;
h_lms(k+1,:) = h_lms(k,:) + mu_lms*Error*X';
end
W1 = zeros(Taps+1,1);
for k = 1:Taps+1,
for q = Number(j)-Last-Taps:Number(j)-Taps,
W1(k) = W1(k) + h_tlms(q,k);
end
end
H1 = W1/Last;
H1 = H1/(-H1(6));
H1 = AA*H1;
H_TLMS = [H_TLMS H1];
E1 = norm(H_Ideal - H1);
Error_TLMS = [Error_TLMS, E1];
29
W2 = zeros(Taps,1);
for k = 1:Taps,
for q = Number(j)-Last:Number(j),
W2(k) = W2(k) + h_lms(q,k);
end
end
H2 = W2/Last;
H_LMS = [H_LMS H2];
E2 = norm(H_Ideal - H2);
Error_LMS = [Error_LMS, E2];
end
end
h1
h2
e1
e2
=
=
=
=
H_TLMS
H_LMS
20*log10(Error_TLMS)
20*log10(Error_LMS)
figure;
plot(Number,e1,'-',Number,e2,'-.');
title('TLMS Vs LMS Algorithm at SNR = 0');
xlabel('Number of samples');
ylabel('Error in Db');
legend('Error TLMS','Error LMS');
30
APPENDIX B
Part2: The simulation in Methodology part2
This program uses the TLMS and LMS algorithms to identify the transfer function of
system (Hi), which is corrupted with noise at SNR equals to “s” by using fixed number of
samples (num). This program repeats the simulation for T times. The results are average
transfer function computed by the TLMS and LMS algorithms including their variances
at selected SNR.
Input
Hi : Transfer function used in the simulation.
s : Signal to Noise Ratio.
num : Number of samples using in the simulation.
u_tlms : The learning rate of the TLMS algorithm.
u_lms : The learning rate of the LMS algorithm.
T : Number of repetitions.
Output
h1 : Average transfer function computed from the TLMS algorithm.
h2 : Average transfer function computed from the LMS algorithm.
v1 : Variance of the transfer function computed by the TLMS algorithm
v2 : Variance of the transfer function computed by the LMS algorithm
31
function [h1,h2,v1,v2] = part2(Hi,s,num,u_tlms,u_lms,T)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Part2 : The simulation in Methodology part2
%
Find the average transfer function of the TLMS and LMS
%
algorithm and their variances.
%
% Input
%
Hi : Transfer function used in the simulation.
%
s : Signal to Noise Ratio.
%
num : Number of samples using in the simulation.
%
u_tlms : The learning rate of the TLMS algorithm.
%
u_lms : The learning rate of the LMS algorithm.
%
the average.
%
T : Number of repetitions.
%
% Output
%
h1 : Average transfer function computed from the TLMS algorithm.
%
h2 : Average transfer function computed from the LMS algorithm.
%
v1 : Variance of the transfer function computed by the TLMS alg.
%
v2 : Variance of the transfer function computed by the LMS alg.
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Ideal System
H_Ideal = Hi
% Signal to Noise ratio
SNR = s
% Number of sample using in the simulation
Number = num
% Learning rate for TLMS and LMS algorithms
mu_tlms = u_tlms
mu_lms = u_lms
time = T;
Last = 50;
Taps = length(H_Ideal);
PP = 1;
AA = eye(Taps);
AA = [AA, zeros(Taps,1)];
H_T = [];
H_L = [];
E_T = [];
E_L = [];
mu_tlms = 0.001;
mu_lms = 0.001;
for i = 1:length(SNR),
32
for iteration = 1:time,
Signal = PP*randn(1,Number);
% Find the Power of the Signal
Power = 0;
for k = 1:Number,
Power = Power + Signal(k)^2;
end
Power = Power/Number;
% Noise
% SNR = 20 log(Px/No)
% No = Px*10^(-SNR/20)
No = Power* 10.^(-SNR/20);
% Ideal Signal come out of the system
DesireSignal = conv(H_Ideal,Signal);
Signal = Signal + sqrt(No)*randn(1,Number);
DesireSignal = DesireSignal + sqrt(No)*randn(1,length(DesireSignal));
h_tlms = zeros(Number-Taps+1,Taps+1);
h_tlms = [randn(1,Taps+1)/10; h_tlms];
h_lms = zeros(Number,Taps);
for k = 1:Number-Taps+1,
X = [];
for q = 1:Taps,
X = [X; Signal(k+Taps-q)];
end
Z = [X; DesireSignal(k+Taps-1)];
Y = Z'*h_tlms(k,:)';
h_tlms(k+1,:) = h_tlms(k,:) + mu_tlms*(h_tlms(k,:) norm(h_tlms(k,:))*Y*Z');
Error = DesireSignal(k+Taps-1) - h_lms(k,:)*X;
h_lms(k+1,:) = h_lms(k,:) + mu_lms*Error*X';
end
W1 = zeros(Taps+1,1);
for k = 1:Taps+1,
for q = Number-Last-Taps:Number-Taps,
W1(k) = W1(k) + h_tlms(q,k);
end
end
H1 = W1/Last;
H1 = H1/(-H1(6));
H1 = AA*H1;
H_T = [H_T, H1];
E1 = norm(H_Ideal - H1);
E_T = [E_T, E1];
W2 = zeros(Taps,1);
33
for k = 1:Taps,
for q = Number-Last:Number,
W2(k) = W2(k) + h_lms(q,k);
end
end
H2 = W2/Last;
H_L = [H_L, H2];
E2 = norm(H_Ideal - H2);
E_L = [E_L, E2];
end
end
h1 = sum(H_T')/time
h2 = sum(H_L')/time
v1 = var(H_T')
v2 = var(H_L')
34