Airborne remote sensing validation for the separation of the
advertisement

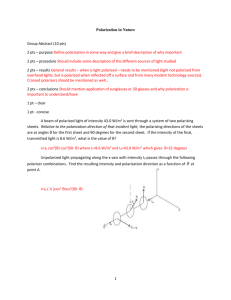
Airborne remote sensing validation for the separation of the polarized effects between objects and atmosphere based on atmosphere neutral point method YANG Shang-qiang1,2, GUAN gui-xia1, ZHAO Hai-meng2,YANG Bin2, ZHANG Wen-kai1,2, WU Tai-xia3, YAN Lei2, 1. College of Information Engineering, Capital Normal University, Beijing 100048; 2. Beijing Key Lab of Spatial Information Integration and 3S Applications, Peking University, Beijing 100871; 3. Institute of Remote Sensing and Digital Earth, Chinese Academy Of Sciences, Beijing 100101 Abstract Based on the object’s polarization effects, polarization remote sensing is a newly emerging method in the field of remote sensing. Both objects and atmosphere have polarization effects, however, the atmosphere’s polarization effects are much stronger than that of objects’. Consequently, atmosphere polarization effects will interfere or even cover objects’ when observing with sensors. How to maximally eliminate the polarized effects generated by the atmosphere is a crucial problem in polarization remote sensing. Atmospheric neutral point is an area where the degree of atmosphere polarization is next to zero; therefore, if sensors are set up in this area, atmosphere polarization would be greatly eliminated, which is the main content of separating the effects between objects and atmosphere by atmospheric neutral point method. In this paper, after processing and analyzing the experimental data got from the first polarization remote sensing flight experiment with atmosphere neutral point, the degree of polarization images captured in neutral and non-neutral point area were obtained, and it can be seen that the main value of polarized degree of images got in neutral point area was obviously smaller than that in non-neutral point area. The results showed that the theory mentioned above was logical and practical. An innovation in our study is that the requirements needed in polarization remote sensing flight with neutral point were clarified. In the meantime, a qualitative conclusion was drawn that observing with longer wavelength is more applicable to polarization 1 Foundation: National Natural Science Foundation of China ( 61174220) (41101328)and Project of Beijing Municipal Education Commission(KM201210028002) Author: YANG Shang-qiang, male, Master candidate, Engaged in polarization remote sensing and atmospheric neutral point. Telephone: 18810442532 E-mail: tinginsky@126.com Corresponding author: YAN Lei, Professor, Peking University. Telephone: 13910821927 E-mail: lyan@pku.edu.cn remote sensing. Key Words polarization remote sensing; atmospheric neutral point; separation the polarized effects between objects and atmosphere primary scattering will generate positive Introduction As one of the major characteristics of Electromagnetic Wave [1], polarization effects can occur when natural light reflects from objects [2,3,4] , and thus polarization remote sensing provides new potential information with this kind of feature. This made polarization remote sensing emerging and become a newly highly concerned observation method in recent years, which is applied to practice. However, the atmosphere also has polarization effects much stronger than the object’s polarization[5]; therefore, atmosphere polarization effects will interfere or cover objects’ when observed with sensors. Then how to eliminate the influence of atmosphere polarization on objects polarization is one of the crucial problems in polarization remote sensing[6]. When the sun light crosses through the atmosphere, it is scattered by atmospheric particles, and then becomes polarized light. Generally speaking, polarization scattering value, will polarization and multiple generate negative value; while in some particular area, which is the so-called atmospheric neutral point[7], the polarization value may turn to zero when the positive and negative polarization counteracted with each other. Consequently, if sensors are set up in the area to observe objects, atmosphere polarization effects will be eliminated, and more information of objects will be obtained, which is the main content of separating the effects between objects and atmosphere based on atmospheric neutral point theory [8] . In our study, the polarization remote sensing flight experiment firstly reported in China was carried out and requirements needed in polarization remote sensing flight with neutral point were clarified. A series of images both in neutral and non-neutral point area were obtained by making comparisons. The data showed that polarization degree of images obtained in neutral point area is smaller than that got in non-neutral point area, proving the rationality and Fig. 1.1 Positions of three neutral points Optical parameters of clear sky can practicability of the theory. be characterized by Rayleigh scattering. 1 Atmospheric neutral point and However, the actual sky polarization is very different from Rayleigh model, separation effects of between the polarized objects and Arago, a French astronomer, firstly discovered the phenomenon of sky polarization in 1809. Soon afterwards he found an area called Arago Neutral Point, in which the polarization was close to zero. Thirty years later, Babinet, a French meteorologist, discovered the second neutral point called Babinet Neutral Point. The third neutral point was found years later by Brewster, a named Brewster Neutral Point[9,10]. The positions of the three neutral points are shown in Fig 1.1. The height of three neutral points will simultaneously change according to the position of the sun. anisotropy, aerosol distribution and ground reflection. One 1.1 Atmospheric neutral point physicist, multiple scattering of aerosol particles, molecular atmosphere Holland called polarization defect caused by obvious character of the defect is the atmospheric neutral point [11]. Stokes vectors can be used to describe light intensity and polarization. Stokes vectors consist of four components, I, Q, U and V. I component indicates the total intensity of the light, Q component indicates the horizontal and vertical linear polarization, U component indicates the ±45°linear polarization, and V component indicates the laevorotatory and dextrorotatory circular polarization[12]. Being very small, V component is commonly ignored, so we can get all Stokes vectors just by solving three equations. When the light crosses through an ideal polarizer, its Miller matrix is: 1 1 cos 2 Mp 2 sin 2 0 cos 2 cos 2 2 cos 2 sin 2 sin 2 cos 2 sin 2 sin 2 2 0 0 0 0 0 0 (1.1) is the angle between the of multiple scattering, the neutral point polarizer and reference direction. Stokes components of scattered is a region in which the polarization is close to zero, rather than a separate point; light S out are: Sout two meanings: first, due to the presence Second, the neutral point in the sky is a I ' I Q ' Q Mp U ' U V ' V (1.2) circular cone(Fig. 1.2) in which the polarization is always zero at any height[8,13], rather than a fixed area. The intensity of scattered light is: 1 I out I ' ( I cos 2 Q sin 2 U ) (1.3) 2 Since V component is very small, we just calculate the DOLP (Degree Of Linear Polarization) of the object. If is set as 0°, 60° and 120°, respectively, three equations(1.4) Afterwards, observed are Stokes points obtained. components are obtained of and DOLP(1.5) can be calculated by using 2 I 3 ( I 0 I 60 I120 ) 2 Q (2 I 0 I 60 I120 ) 3 2 ( I 60 I120 ) U 3 1.2 the polarized effects between objects and atmosphere is: the observation sensors are put in the neutral point areas, then greatly eliminated. Finally, the information of objects polarization is (1.4) acquired as much as possible 2 Airborne authentication 2.1 Experimental instruments and Q2 U 2 I Separation The method used to separate the the atmosphere polarization effects are these Stokes components. DOLP Fig. 1.2 Neutral Point Area (1.5) flight requirements polarized Some requirements and experimental instruments must be met in effects between objects and atmosphere The atmospheric neutral point has remote sensing observation experiments, described as follows. 2.1.1 Experimental instruments The experimental instrument is independently contrived by Beijing Key Lab of Spatial Information Integration and 3S Applications, Peking University. It consists of three D200 digital cameras, Fig. 2.2 Three digital cameras one engineering control machine and one liquid-crystal display (LCD) (Fig. 2.1). The three digital cameras are fixed on a mechanical bracket which can rotate at specific angles (Fig. 2.2). In the front of each digital camera a customized polarizer is fixed. The angles between the light-transmissive axis and reference direction are 0°, 60° and 120° (Fig. 2.3), respectively. The cameras are controlled by the engineering control machine in order to shoot at the same time, after which images are transmitted into the engineering control machine and can be viewed through the LCD. Fig. 2.3 Angles of three polarizer 2.1.2 Neutral point selection There are three common neutral points in the sky: Arago Neutral Point, Brewster Neutral Point and Babinet Neutral Point. As the neutral point is distinctly affected by external conditions such as the sun’s location, atmospheric conditions, surface albedo and observation band, it is thereby necessary to select a suitable neutral point. All things considered, Babinet Neutral Point is chosen as the observation neutral point, which is always within the range of 20 ° in the vicinity of the sun, and coincides with the sun at noon. The relation between Babinet Neutral Point elevation angle and solar elevation angle Fig. 2.1 Experimental instrument is shown in formula 2.1. Solar elevation angle always nevertheless it changes can be in a day, calculated. Formula 2.2 illustrates how to calculate elevation angle is complementary with solar elevation angle. In the formula, h camera deflection angle. indicates solar elevation angle, represents latitude and longitude, and solar declination angle checked out by the can be Astronomical Almanac. Fig. 2.5 Camera deflection angle 2.1.5 Route spacing y 0.9 x 18(0 x 30) y 0.75 x 22.5(30 x 90) Images (2.1) where x indicates solar elevation angle, y indicates neutral point elevation angle. sinh sin sin cos cos (2.2) in both neutral and non-neutral point area are needed to make a comparison. Supposing that we are observing in the neutral point area when the airplane flies from south to 2.1.3 Flight direction As shown in Fig. 2.4, flight direction should be perpendicular to the line between the sun and object, and the north is set as zero while defining solar north, images shot in non-neutral point area can be obtained when it returns. In order to observe the same objects, a distance limited by flight height H and camera deflection angle should be azimuth. made between the round-trip routes (Fig. 3.6). Rout e spaci ng = 2 t an H (2.3) Fig. 2.4 Flight direction 2.1.4 Camera deflection angle Fig. 2.6 Route spacing In order to make the observation area within the neutral point region, the cameras should deflect a certain angle. Fig. 2.5 demonstrates the camera deflection angle. The neutral point Neutral point elevation angle always changes along with the solar elevation angle, while the solar elevation angle changes over time. Flight direction and camera deflection angle are (Table 1), from which it can be seen that determined by both solar and neutral neutral point coincides with the sun at point elevation angle. All these factors noon; therefore, this period of time considered, a parameter lookup table should be avoided. was drawn for convenient research Table 1 Parameter lookup table Neutral Solar Solar Solar Time zenith Camera point elevation azimuth angle Flight Observing Camera Rout direction angle direction spacing(H=3km) 8.54 West 2219.76 8.19 West 1917.44 8 West 1623.70 8.04 West 1337.04 8.49 West 1056.07 9.76 West 780.33 13.16 West 509.37 25.36 West 249.11 23.42 West 113.90 -19.05 East 334.14 -11.61 East 599.67 -9.2 East 872.36 -8.27 East 1149.44 -7.99 East 1432.17 deflection elevation angle angle angle 10:30 27.07 81.46 62.93 69.6975 20.3025 10:45 23.63 81.81 66.37 72.2775 17.7225 11:00 20.19 82 69.81 74.8575 15.1425 11:15 16.75 81.96 73.25 77.4375 12.5625 11:30 13.31 81.51 76.69 80.0175 9.9825 11:45 9.88 80.24 80.12 82.59 7.41 12:00 6.47 76.84 83.53 85.1475 4.8525 12:15 3.17 64.64 86.83 87.6225 2.3775 12:30 1.45 336.58 88.55 88.9125 1.0875 12:45 4.25 289.05 85.75 86.8125 3.1875 13:00 7.61 281.61 82.39 84.2925 5.7075 13:15 11.03 279.2 78.97 81.7275 8.2725 13:30 14.46 278.27 75.54 79.155 10.845 13:45 17.9 277.99 72.1 76.575 13.425 north by west north by west north by west north by west north by west north by west north by west north by west north by west north by east north by east north by east north by east north by east 14:00 21.34 278.04 68.66 73.995 16.005 14:15 24.78 278.29 65.22 71.415 18.585 14:30 28.22 278.68 61.78 68.835 21.165 14:45 31.65 279.15 58.35 66.2625 23.7375 15:00 35.08 279.70 54.92 63.69 26.31 north by east north by east north by east north by east north by east -8.04 East 1721.04 -8.29 East 2017.47 -8.68 East 2323.03 -9.15 East 2638.50 -9.7 East 2966.68 2.2 Data analysis The experiment, which was carried 3.5km (Fig. 2.6), which was observing out in Zhuhai(113.4°E,22.1°N) on in non-neutral point area. The remaining June 18, 2012 when the sky was clear was free flight time. with few clouds, was the first polarized remote sensing experiment with Images captured in neutral point area are shown in Fig. 2.7, and Fig. 2.8 atmospheric neutral point in China. The shows the images flight height was 3km, the speed non-neutral point area. There are some 250km/h, the shooting interval 6s, and differences between images captured by the time 16:30pm~17:30pm. Camera three cameras, because the cameras’ deflection angle was 40.18°, facing the location fields of view are different, and east. The airplane flew from south to it is impossible to avoid image distortion. north first, and the angle between flight Therefore, it is necessary to register the direction and the north was 14.7 ° , images first. Using the software ENVI, which was observing in neutral point the registration images captured both in area. After 15 minutes’ flight, the neutral (Fig. 2.9) and non-neutral point airplanes returned with a distance of area (Fig. 2.10) were obtained. Fig. 2.7 Images captured in neutral point area captured in Fig. 2.8 Images captured in non-neutral point area Fig. 2.9 Registration images captured in neutral point area Fig. 2.10 Registration images captured in non-neutral point area Fig. 2.11 and Fig. 2.12 show non-neutral point area with a percent of polarization degree of images got in 5.17%, which proved that atmospheric neutral point area and non-neutral point neutral point can be used to eliminate area respectively, along with its atmosphere polarization effects in histogram. By comparison, it can be polarized remote sensing in order to get seen that most values of polarization more information of objects. degree are smaller than 0.4 in neutral Fig. 2.13 shows R-band, G-band point area, while most are bigger than and B-band polarization degree of 0.5 in non-neutral point area. Besides, images got in neutral point area. It can the object details in neutral point area be observed that the polarization degree are much more than those in non-neutral of R-band and G-band is smaller than point area. Based on the statistics, the that of B-band, and more details are value of polarization degree is smaller obtained in the first two bands. For than 0.4 in neutral point area and the example, the building in upper left is percent is 84.45%, whereas the value of missing in B-band polarization degree polarization degree is smaller than 0.4 in image, and there is more information in R-band than G-band image. Fig. 2.14 acquired while being observed with shows R-band, G-band and B-band longer band. What’s more, longer polarization degree of images got in wavelength band is conducive to non-neutral point area. The same eliminating atmosphere polarization conclusion as neutral point area effects. Further research on the mentioned above can be drawn. relationship between observation band Therefore, it can be concluded that and the amount of image information is qualitatively more information can be needed in the future. Fig. 2.11 Polarization degree of images got in neutral point area (left) and its histogram (right) Fig. 2.12 Polarization degree of images got in non-neutral point area (left) and its histogram (right) Fig. 2.13 R-band (left), G-band (middle) and B-band (right) polarization degree of images got in neutral point area Fig. 2.14 R-band (left), G-band (middle) and B-band (right) polarization degree of images got in non-neutral point area Although the height and brightness get images of the very same objects in of the sun always changed during the the round-trip flight. However, as the flight, the flight time was so short that effect of eliminating atmosphere the influence on the results can be polarization effects with neutral point ignored. We can only get images of was very obvious, the experiment was objects nearby, for it was too difficult to reliable. 3 Conclusions Based on the analysis above, the sensing. information of objects in neutral point References area is much more than that in [1] Schott J R. Fundamentals of non-neutral point area and longer Polarimetric Remote Sensing. wavelength band is conducive to Bellingham, Washington: Society of eliminating atmosphere polarization Photo Optical, 2009. effects, proving it effective to eliminate [2] Wu Taixia, Zhao Yunsheng. The atmosphere polarization effects with bidirectional polarized reflectance neutral atmospheric point. The model of soil. IEEE Transactions on innovation in our study is that the Geoscience and Remote Sensing, requirements needed were proposed in 2005, 43(12): 2854-2859. polarization remote sensing flight with [3] Talmage D A, Curran P J. Remote neutral point. At last, a qualitative sensing using partially polarized conclusion was drawn that observing light. International Journal of with longer wavelength is more Remote Sensing. 1986, 7(1): 47-64 applicable to polarization remote [4] Tianhai Cheng, Xingfa Gu, etc. Surface bidirectional reflectance compase calibration in migratory analysis of space-based vector songbirds. Science, 2006, 313(5788): image of the radiation detection. 837-839. ACTA PHYSICA SINICA, 2009, 58(10): 7368-7375. [5] Lee R L. Digital imaging of clear sky polarization. Appl Opt, 1998, 37:1465-1476. [6] Nadal F, Breon F M. [11] Coulson K L. Polarization and intensity of light in the atmosphere. Hampton, Va, USA: A. Deepak Pub, 1988: 596 [12] Guixia Guan, Lei Yan, Jiabin Chen. Analyzing Dynamic Property Of Parameterization of surface Skylight Polarization Pattern Graph. polarized reflectance derived from Computer applications and software. POLDER spaceborne measurements. 2009, 26(12):179-181 IEEE Transactions on Geoscience [13] Lei yan, Guixia Guan, Jiabin Chen, and Remote Sensing. 1999, etc. The Bionic Orientation 37(3):1709-1718 Mechanism in the Skylight [7] Peixuan Sheng, Jietai Mao, Jianguo Polarization Pattern. Acta Li. Atmospheric Physics. Beijing: Scientiarum Naturalium Peking University Press, 2003. Universitais Pekinensis (ASNUP), [8] Taixia Wu. Study on the land objects characteristics and the separation method for the effect between objects and atmosphere in polarization remote sensing. Ph.D. thesis, Peking University. 2010. [9] Berry M V, Dennis M R, Lee R L. Polarization singularities in the clear sky. New Journal of Physics. 2004,6. [10] Muhem R, Phillips J B, Akesson S. Polarized light cues underlie 2009 45(4):616-620