MATLAB_Integrators
advertisement

MATLAB Handout:
Integrators in MATLAB
MATLAB has several pre-built integrators for our use. This handout will give you a basic idea of how to
work them to get the results that you need in ASEN 5070.
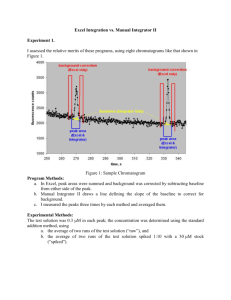
What are Integrators?
Integrators are algorithms that approximate a trajectory in a system based on initial conditions and
knowledge of the equations of motion for that system. The basic idea is that a trajectory may be
constructed by integrating its derivative, hence the name integrator.
Integrators may be as accurate as desired given perfect precision, arbitrarily large expansions, and
arbitrarily small time-steps. But there is a trade-off between an integrator’s performance and how long it
takes to perform the integration.
In general, integrators use a Taylor expansion to approximate the dynamics in the system. Euler’s Method
invokes a 1st-order expansion, which works swiftly but with generally poor accuracy. The midpoint
method invokes a 2nd-order expansion, which approximates the dynamics much better but still with
noticeable errors (i.e., the energy in the system tends to change when it shouldn’t). On the other hand, a
very high order expansion, e.g., 8th-order, works very well at approximating the dynamics for a very long
amount of time, but takes a long time to operate. The most popular compromise is the Runge-Kutta
integrator, which invokes a 4th-order expansion. It is the workhorse of many disciplines, including
astrodynamics.
Variable Time-Step Integrators
The dynamics in astrodynamical systems tend to include very interesting regions near massive bodies and
large slowly-changing regions between massive bodies. An integrator requires much smaller time-steps
near the massive bodies than elsewhere in order to accurately approximate the dynamics. But it would be
computationally wasteful to use such small time-steps far away from the planets. By implementing a
variable time-step integrator, the integrator will naturally decrease its time-steps near the planets in order to
retain the computational accuracy, but it will also increase its stride away from the planets and save large
amounts of computational time. Thus, one only needs to specify an overall tolerance and the integrator will
work to keep that tolerance despite the stride-lengths that it uses.
MATLAB’s Integrators
Solver
Problem Type
Order of
Accuracy
ode45
Nonstiff
Medium
ode23
Nonstiff
Low
ode113
Nonstiff
Low to high
ode15s
Stiff
Low to medium
ode23s
Stiff
Low
When to Use
Most of the time. This should be the first solver you
try.
For problems with crude error tolerances or for
solving moderately stiff problems.
For problems with stringent error tolerances or for
solving computationally intensive problems.
If ode45 is slow because the problem is stiff.
If using crude error tolerances to solve stiff systems
and the mass matrix is constant.
ode23t
Moderately Stiff
Low
ode23tb
Stiff
Low
For moderately stiff problems if you need a solution
without numerical damping.
If using crude error tolerances to solve stiff systems.
ode45.m
MATLAB’s pre-built ode45.m integrator is generally the best option for any astrodynamical application. If
more accuracy is required, we suggest doing a google search for an ode78 routine or something similar.
The basic command to call the ode45 integrator looks like this:
[t,State] = ode45('dState',time,ICs,options);
The integrator takes a vector of initial conditions (either a column or row vector) and integrates it using the
dynamics given in the 'dstate' function. It outputs the approximate trajectory at every time-point given
in the vector time. The outputs include t, the vector of time values that ode45 did integrate to (in general
the same vector as time), and State, which is an array containing the state at every point in time.
Summarized:
Inputs:
• 'dState':
• time:
• ICs:
• options:
Outputs:
• t:
• State:
The name of the file that contains the derivative functions (discussed in the next
section);
The vector of time values to integrate;
The vector of initial conditions for the system (either row or column);
An optional specification for the options given to the integrator (tolerance, etc.).
The vector of times that the integrator did produce (usually the same as time);
An array containing the values of the state at every time.
The 'dState' Function
The derivative function for most astrodynamical systems looks like this:
function dRV = dState(time,RV)
x
y
z
vx
vy
vz
=
=
=
=
=
=
RV(1);
RV(2);
RV(3);
RV(4);
RV(5);
RV(6);
constants = (declare what constants you are using)
ax = Some function of x,y,z,vx,vy,vz,time,constants
ay = Some function of x,y,z,vx,vy,vz,time,constants
az = Some function of x,y,z,vx,vy,vz,time,constants
% The function will return the following variables in a vector
dRV = [vx; vy; vz; ax; ay; az];
That’s all! The function must be named ‘dState.m’ (or whatever, so long as the first line of the function
reflects its name and the ode45 call has the right function name). It’s probably easiest to declare all the
constants in the function. If the constants change over the trajectory, you may need to declare the constants
global in both the main program and the derivative function. That way, they will change as needed.
The options object
There are various options that may be set in ode45. Type “help odeset” to see all of the available options.
In general we only care about setting the relative and absolute tolerance for the system. To do that, use the
following snippet of code:
% Tolerance
tolerance = 1e-12;
% Setting up ODE45
options = odeset('RelTol',tolerance,'AbsTol',tolerance);
An Example
…
% Set up the time vector
t0 = 0;
tf = 86400;
% 1 day later
dt = 20;
% 20-second intervals
time = [t0:dt:tf];
% Set up initial conditions
ICs = [x0,y0,z0,vx0,vy0,vz0];
% Tolerance
tolerance = 1e-12;
% Setting up ODE45
options = odeset('RelTol',tolerance,'AbsTol',tolerance);
% Integrating with a simple 2-body integrator
[time RV] = ode45('dR_2body', time, ICs, options);
% Integrating with 2-body plus the J2 effect
[time RV] = ode45('dR_2body_J2', time, ICs, options);
% Integrating with 2-body plus the J2 effect and drag
[time RV] = ode45('dR_2body_J2_drag', time, ICs, options);
% Recording all of the corresponding vectors for Position and Velocity
x = RV(:,1);
y = RV(:,2);
z = RV(:,3);
vx = RV(:,4);
vy = RV(:,5);
vz = RV(:,6);
…