Dispersion Curves for Infinite Plate Using FEM
advertisement

ASEN 5367
ADVANCED FINITE ELEMENT METHOD
Term Project
Dispersion Curves for Infinite Plate Using FEM
Presented For
:
Prof. Carlos A Felippa
Done By
:
Hussain AlQahtani (# 800552427)
2
Contents
1
Introduction
3
2
Problem Statement
5
3
Mathematical Formulations
7
3.1 Displacement
7
3.2 Strain
8
3.3 Element Energies
12
3.4 Hamilton Variational Principle
13
3.5 Assemblage
15
3.6 Fourier Transform
15
3.7 Final Form
15
Results and Discussions
16
4
5
4.1
Dispersion, frequency, and group velocity curves for Ni 17
Plate
4.2
Dispersion, frequency, and group velocity curves for Silicon 18
Nitride (Si3N4) Plate
4.3 Effects of Anisotropy
20
Conclusions and Possible Future Work
21
References
23
Appendix
24
3
Introduction
The effect of a sharply applied, localized disturbance in a medium soon transmits
or “spreads” to other parts of the medium. This simple fact forms a basis for study of
the fascinating subject known as wave propagation. This phenomenon is familiar to
everyone in forms such as the transmission of sound in air, the spreading of ripples on
a pond of water, the transmission of seismic tremors in the earth, or the transmission
of radio waves. These and many other examples could be cited to illustrate the
propagation of waves through gaseous, liquid, and solid media and free space.
The physical basis for the propagation of a disturbance ultimately lies in the
interaction of the discrete atoms of the solid. Investigations along such lines are more
attuned to physics than mechanic, however. In solid and fluid mechanics, the medium
is regarded as continuous, so that the properties such as density or elastic constants are
considered to be continuous functions representing averages of microscopic
quantities.
The practical applications of wave phenomena surely go back to the early
history of man. The shaping of stone implements, for example, consists of striking
4
sharp, carefully placed blows along the edges of a flint. Nowadays, the motivations
for the current high level of interest in the subject are the many practical applications
in science and industry. In the area of structures, for example the interest is mainly in
the response to impact or blast loads. Another area in the study of structures involving
wave phenomena is that of crack propagation or the interaction of dynamic stress
fields with existing cracks, voids, or inclusions in a material. The field of ultrasonics
represents another major area of application of wave phenomena. The general aspects
of this area involve introducing a very low energy level, high-frequency stress pulse
into a material and observing the subsequent propagation and reflection of this energy.
The general subject of waves in the earth covers many interesting propagation
phenomena. Earthquakes generate waves that may travel thousands of miles. Study of
the propagation of such waves artificially produced has provided the most knowledge
on the interior construction of the earth.
As stated above, the phenomenon of waves can exist in almost all applications.
In this project, however, a propagation of waves in plate is considered. More
precisely, the dispersion curves and frequency spectrum will be computed for infinite
plate.
In next section, the problem statement and assumptions will be introduced,
followed by the mathematical formulation in section 3. In section 4, numerical results
5
of dispersion and spectrum curves are introduced. The fifth, and last, section of this
projects concerns some concluding remarks and possible future work.
1 Problem Statement
In this project, an infinite, in x- and y-direction, plate is considered. The plate is
assumed to be homogeneous and elastic. Dispersion, frequency, and group velocity
curves are to be developed for such plate. Consequently, we consider time-harmonic
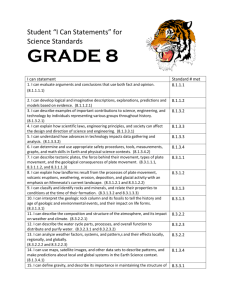
motion in infinite plate. As shown in Figure 1, the plate consists of N of parallel,
homogeneous, and anisotropic layer, which are perfectly bonded together along the
length of the plate. A global rectangular coordinate system (x, y, z) is adopted such
that x and y axes lie in the mid-plane of the plate, and z-axis parallel to the thickness
direction of the plate. The thickness of the plate is discretized using three nodes, each
of which has associated of it a displacement vector consisting of displacements in the
three main directions, namely, u along x-axis, v along y-axis, and w along the z-axis as
shown in Figure 1.
6
z
y
x
w3
3
v3
u3
2
1
Figure 1 Problem Description
7
2 Mathematical Formulations
2.1
Displacement
The displacement u( x, y, z, t ) {u, v, w}T at a point within an element is written as,
u( x, y, z, t ) N( z )u(e) ( x, y, t )
(1)
where N(z) are standard finite element shape functions:
0
0
N2 ( z)
0
0
N3 ( z )
0
0
N1 ( z )
N 0
N1 ( z )
0
0
N2 ( z)
0
0
N3 ( z )
0
0
0
N1 ( z )
0
0
N2 ( z)
0
0
N3 ( z )
1
N1 (1 )
2
N2 1 2
1
N3 (1 )
2
where
z
, and H is the thickness of the element.
H
The column vector u ( e ) is the nodal displacement:
(3)
(2)
8
u(e)
u1 ( x, y, t )
v ( x, y , t )
1
w1 ( x, y, t )
u 2 ( x, y , t )
v2 ( x, y, t )
w ( x, y , t )
2
u3 ( x, y, t )
v ( x, y , t )
3
w3 ( x, y, t )
(4)
and t denotes the time-dependence.
2.2
Strain
Using linear elasticity, the strain tensor is derived as follows:
x
exx 0
e
yy 0
ezz
e
yz 0
xz
xy
z
y
0
x
0
z
0
x
0
0
u
x
v
y w
x
0
(5)
9
The derivative matrix can be split into three parts according to derivation indices as
follows:
u
e D1 + D2 + D3 v
w
where the derivative matrices are given as follows:
0
x 0
0
0
0
0
0
0
D1 0
0
0
0
0
x
0
0
x
0
0
0
D2
0
0
y
and,
0
y
0
0
0
0
0
0
0
y
0
0
(6)
(7)
(8)
10
0
0
0
D3
0
z
0
0
0
z
0
0
0
0
0
0
z
0
0
(9)
Now, consider the firs term in Equation (6), and substitute for the displacement vector
from Equation (1),
u
D1 v = B1u,(xe )
w
(10)
where
N1
0
0
B1
0
0
0
and,
0
0
0
0
N2
0
0
0
0
0
N3
0
0
0
0
0
0
0
0
N1
0
0
0
0
0
0
0
0
N2
0
0
0
0
0
0
N1
0
0
N2
0
0
N3
0
0
0
0
N3
0
11
u (,ye )
u1, x ( x, y, t )
v ( x, y , t )
1, x
w1, x ( x, y, t )
u2, x ( x, y, t )
v2, x ( x, y, t )
w ( x, y , t )
2, x
u3, x ( x, y, t )
v ( x, y , t )
3, x
w3, x ( x, y, t )
In the preceding and following equations, the simplified notations will be used to
indicate derivatives, namely,
,x
,
x
,y
, and
y
,z
.
z
Similarly, the second term in Equation (6) is written as:
u
D2 v = B 2 u,y(e)
w
(11)
where
0
0
0
B2
0
0
N1
and
0
N1
0
0
0
0
0
N2
0
0
0
0
0
N3
0
0
0
0
N1
0
0
0
0
0
0
0
0
N2
0
0
0
0
0
0
0
0
0
N2
0
0
N3
0
0
0
0
N3
0
0
12
u (,ye )
u1, y ( x, y, t )
v ( x, y , t )
1, y
w1, y ( x, y, t )
u2, y ( x, y, t )
v2, y ( x, y, t )
w ( x, y , t )
2, y
u3, y ( x, y, t )
v ( x, y , t )
3, y
w3, y ( x, y, t )
The third term of Equation (6) is written as:
u
D3 v B 3u( e )
w
(12)
where,
N1, z
0
0
B3
0
0
0
0
0
0
0
0
0
0
0
N 2, z
0
0
0
0
0
0
0
0
0
0
0
N3, z
0
0
0
0
0
0
0
0
N1, z
N1, z
0
0
0
0
N 2, z
N 2, z
0
0
0
0
N3, z
N 3, z
0
0
0
0
0
Rewriting the strain in terms of B matrices, Equation (6) becomes:
e B1u,(xe) B2u,(ye) B3u( e)
2.3
Element Energies
The element strain energy is defined as:
(13)
13
h
U eT Ee dzdxdy
(14)
y x h
where h is the thickness of the element.
While the kinetic energy of an element is defined as:
h
T u(e) u(e) dzdxdy
T
(15)
x y h
2.4
Hamilton Variational Principle
Hamilton’s principle is an integral principle, which means that it considers the
entire motion of a system between t1 and t2. This principle maybe stated as follows:
Among all motions that will carry a conservative system from a given
configuration at time t1 to a second given configuration at time t2, that which
actually occurs provides a stationary value of the integral.
Mathematically, the principle may be written as,
t2
T U dt 0
(16)
t1
Using Equations (14) and (15) in Equation (16), the principle is written as
follows:
h
1
eT Ee u(e) T u(e) dzdydxdt 0
2 t x y h
(17)
The preceding equation is equivalent to
t
1 2
2 t1
h
B u
1
y
x
(e)
,x
+ B 2 u,(ye ) + B 3 u ( e ) E B1u ,(xe ) + B 2 u ,(ye ) + B 3 u ( e )
T
h
u
(e) T
u(e)
dzdxdydt 0
(18)
14
By performing the integration over the element thickness, the final form of the
Hamilton’s principle becomes:
t
1 2
2 t1
(e)
u, x
T
y
(e) (e)
(e) (e)
( e) ( e)
K11
u, x u,(xe ) K12
u, y u,(xe ) K13
u
T
T
x
u
u
(e) T
,y
K (21e ) u,(xe ) u,(ye ) K (22e ) u,(ye ) u,(ye ) K (23e ) u ( e )
(e) T
(e) (e)
(e) (e)
( e) ( e)
K 31
u, x u ( e ) K 32
u, y u ( e ) K 33
u
T
T
T
(19)
T
u(e) M ( e ) u(e)
T
dzdxdydt 0
Where the stiffness and mass matrices are:
h
B
(e)
K 11
T
1
EB1 dz
h
(e)
K 12
K (21e )
T
h
B
T
1
EB 2 dz
h
(e)
(e)
K 13
K 31
T
h
B
T
1
EB1 dz
h
h
B
K (21e )
T
2
EB1 dz
T
2
EB 2 dz
h
h
B
K (22e )
h
K (23e ) K (23e )
T
h
B
T
2
EB 3 dz
h
h
(e)
K 33
B
T
3
EB 3 dz
h
M (e)
h
N
T
N dz
h
The above integrals are calculated numerically using Gaussian integration rule.
15
2.5
Assemblage
Next, we assemble the element stiffness and mass matrices into global in the
standard manner, and then apply variation to yield the equations of motion:
K11u, xx K 22 u, yy (K12 K 21 )u, xy (K13 K 31 )u, x
(20)
(K 23 K 32 )u, y K 33u Mu 0
where Kij, M, u are the assembled stiffness matrices, the assembled mass matrix, and
the column vectors of assembled nodal displacements, respectively.
2.6
Fourier Transform
For a wave propagating in the xy-plane, we take the Fourier transform of the
displacement as,
uˆ (k x , k y , )
u( x, y, t )e
i ( k x x k y y t )
dxdydt
(21)
Applying this transformation to Equation (20) leads to the following expression,
k x2 K11 k x2 K11 k x k y (K11 K11 ) ik x (K13 K 31 )
ik y (K 23 K 32 ) K 33
uˆ = 2 M uˆ
(22)
where kx and ky are the wavenumbers in the x and y directions, and is the circular
frequency.
2.7
Final Form
For a wave propagating in an arbitrary direction in the xy plane making an
angle θ with the x-axis, we can decompose the wavenumbers as,
16
k x k cos
(23)
k y k sin
Consequently, Equation (22) can be written as,
k 2 K11 cos 2 K 22 sin 2 (K12 K 21 ) cos sin
ik (K13 K 31 ) cos (K 23 K 32 )sin K 33
uˆ = 2 M uˆ
(24)
Equation (24) is an eigenvalue problem. Solving this problem will determine the
dispersion relation for guided waves in infinite plate.
4 Results and Discussions
The above derivation is valid for any anisotropic plate. Two materials; isotropic
and anisotropic are considered here; namely, Ni and Si3N4, respectively. Spectrum,
dispersion and group velocity curves will be computed and plotted for these two
materials.
Spectrum curves are the plot of the nondimensional frequencies (F or W=2 F)
versus the nondimesional wavenubmers (K), while dispersion curves are the plot of
nondimensional wave speed (C) versus either wavenumbers or frequencies.
Group velocity is the velocity of energy propagation, which is defined as
Cg
dW
. Group velocity curves are the plots of Cg versus either K or W. Again,
dK
these curves will be computed and plotted for both materials.
17
4.1
Dispersion, frequency, and group velocity curves for Ni
A Ni plate will be considered first. Table 1 gives the nonzero physical
properties of Ni.
Table 1 Nonzero Properties for Ni
(kg/m3)
8910
C11
(N/m3)
C12
(N/m3)
C13
(N/m3)
C22
(N/m3)
C23
(N/m3)
C33
(N/m3)
C44
(N/m3)
C55
(N/m3)
C66
(N/m3)
299109
130109
130109
299109
130109
299109
85109
85109
85109
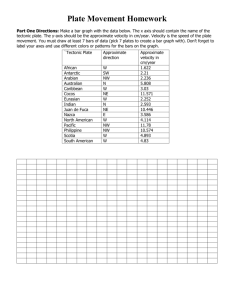
Figure 2 shows spectrum and dispersion curves, respectively, for waveguide
modes in the infinite homogenous isotropic Nickel plate. The wave propagation
direction is chosen such that is equal to zero. The plots are W vs. K and C vs. W for
spectrum and dispersion curves, respectively. Note that the lowest modes propagate
modes propagate at all frequencies, but the higher order modes have cutoff
frequencies below which they are evanescent (nonpropagating).
2.5
12
2
10
1.5
C
W
8
6
1
4
0.5
2
0
0
0
2
4
6
K
Figure 2
8
10
12
0
0.5
1
W
Spectrum and dispersion curves for Ni plate for = 0 o
1.5
2
18
Figure 3 shows group velocity curves for the Ni plate. The two plots are for group
1.5
1.5
1.25
1.25
1
Cg
Cg
velocity versus frequencies and wavenumbers, respectively.
0.75
1
0.75
0.5
0.5
0.25
0.25
0
0
0.5
1
1.5
2
2.5
3
3.5
4
1
2
K
Figure 3
4.2
3
4
5
6
W
Group velocity curves for Ni plate for = 0 o
Dispersion, frequency, and group velocity curves for Silicon Nitride
(Si3N4)
Similar plots are developed for Si3N4 homogenous plate. Silicon nitride is a
hexagonal material widely used MEMS applications. Nonzero physical properties are
given in Table 2.
Table 2 Nonzero Properties of Si3N4
(kg/m3)
3200
C11
(N/m3)
C12
(N/m3)
C13
(N/m3)
C22
(N/m3)
C23
(N/m3)
C33
(N/m3)
C44
(N/m3)
C55
(N/m3)
C66
(N/m3)
574109
127109
127109
433109
195109
433109
108109
119109
108109
19
Spectrum and dispersion curves for Silicon Nitride are shown in Figure 4.
Similar to Ni plate, the propagation direction is chosen to be along the x-axis, i.e. is
equal to zero.
15
3
12.5
2.5
2
C
W
10
7.5
1.5
5
1
2.5
0.5
0
0
2
4
6
8
10
0
0.5
1
K
Figure 4
1.5
2
W
Spectrum and Dispersion Curves for Si3N4 plate for = 0 o
Group velocity curves for Silicon Nitride plate are shown in Figure 5. Similar
to Ni plate, group velocities will be plotted versus K and W, respectively.
1.5
1.5
1.25
1.25
1
Cg
Cg
1
0.75
0.75
0.5
0.5
0.25
0.25
0
0
1
2
3
4
5
6
1
2
K
Figure 5
Group velocity curves for Si3N4 plate for = 0 o
3
W
4
5
6
20
4.3
Effects of Anisotropy
To see the effect of anisotropy in an infinite homogenous plate, spectrum
curves are computed and compared along different directions. For this purpose, these
curves are first computed and plotted for the isotropic Ni plate. The first plot in Figure
6 shows spectrum curves when the propagation direction is along the x-axis (=0),
while the second plot shows them when the propagation direction makes a 30o angle
with the x-axis. Since Ni is an isotropic material the two plots are identical as
12
12
10
10
8
8
W
W
expected. See Figure 6.
6
4
4
=0 o
2
6
=30 o
2
0
0
0
2
4
6
K
8
10
12
0
2
4
6
8
K
Figure 6 Spectrum curves for Ni plate for = 0 o and = 30 o, respectively
10
12
21
Same curves are computed for the Si3N4 plate as illustrated in Figure 7. In this
case, the effect of anisotropy is clear. Spectrum curves are noticeably different along
the two propagation directions. This is expected since the Silicon Nitride is a
hexagonal material.
14
12
10
10
8
8
W
W
12
6
6
4
4
=0
2
0
2
4
6
8
=30 o
2
o
0
10
0
2
K
Figure 7
4
6
8
10
K
Spectrum curves for Si3N4 for = 0 o and = 30 o, respectively
5 Conclusions and Possible Future Work
Spectrum and dispersion curves are computed for infinite homogenous plates
using FEM. Two types of infinite plates were considered, namely Nickel and Silicon
Nitride plates. As we have seen, FEM is a powerful tool for constructing dispersion
and spectrum curves. Powerfully, FEM can deal with anisotropy very easily, all what
we need to do is to modify the elastic stiffness matrix. The method presented here is
22
quite general and can be used to compute curves for other types of plates. For
example, curves for multilayered, inhomogeneous, finite width plates can be
constructed using this analysis.
As an extension of this work, thermoelasticity will be considered next. This
analysis should be modified to account for the thermal effect on dispersion and
spectrum curves.
23
References:
1. Daniel Royer and Eugène Dieulesaint, Elastic Waves in Solids I Free and
Guided Propagation, Springer-Verlag: Berlin (2000).
2. James F. Doyle, Wave Propagation in Structures, Springer-Verlag: Berlin
(1997).
3. Karl F. Graff, Wave Motion in Elastic Solids, Oxford University Press. (1991).
4. O. M. Mukdadi, S. K. Datta, and M. L. Dunn, “Elastic Guided Waves in a
Layered Plate With a Rectangular Cross Section,” Journal of Pressure Vessel
Technology, 124, pp. 319-325, 2002.
5. O. M. Mukdadi, Y. M, S. K. Datta, A. H. Shah, and A. J. Niklasson, “Elastic
Guided Waves in a Layered Plate With a Rectangular Cross Section,” J.
Acoust. Soc. Am., 112(5), pp. 1766-1779, Nov. 2002.
24
APPENDIX
25
PROJECT CODE
26
27
28
29
30