GRIDS
advertisement

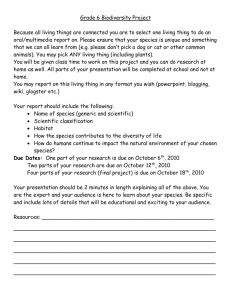
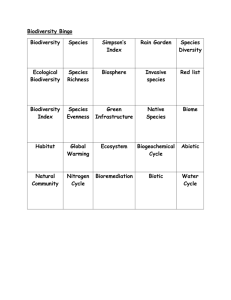
BIODIVERSITY FILTERS March 14, 2001 This document describes the biodiversity filters used for the UMass Biodiversity Assessment Project. Section I provides an overview of biodiversity filters. Section II summarizes input data used for the biodiversity filters. Sections III and IV describe each community and undeveloped block biodiversity filter. Appendix A [Algorithms.doc] is a technical description of the filter algorithms. Appendix B [GIS dictionary.doc] is a technical description of all data coverages used in the project. I. OVERVIEW Biodiversity conservation is the long-term maintenance of the diversity of life at all levels of organization from the gene to the landscape, and all the ecological and evolutionary processes and interconnections that support life. Here, we adopt a more pragmatic focus on the maintenance of viable populations of all native species (from carnivores to soil bacteria) and communities found in their natural places, distributed and functioning within their natural range of variability. The Housatonic Biodiversity Assessment Project is a community-based, coarse-filter approach—we assume that by conserving intact, biologically-defined natural communities, we can conserve most species and ecological processes. Our coarse filter is a first step in the process of targeting land for conservation. Field work will be required to verify predictions made by our broad-scale model, and a further, fine-filter approach will be necessary to include habitat for species of concern that slip through the cracks—this includes many threatened and endangered species. Our approach to biodiversity valuation involves applying one or more “biodiversity filters” to each point and patch in the landscape. Our landscape is a map of predicted natural communities modeled from satellite imagery and terrain data (which captures abiotic factors such as elevation, soil moisture, and solar radiation). We use “filters” as an analogy to camera filters—each biodiversity filter acts as a lens that allows you to see different aspects of the underlying natural community map. Each filter consists of a model that applies community-specific criteria to the content, context, spatial character, or condition of a point or patch in the landscape to arrive at an index of biodiversity value. A filter may, for example, take into account the size of a natural community patch, its proximity to streams and rivers, the diversity of soil types in the patch, or the intensity of roads in the vicinity. Each filter takes input parameters that are supplied separately for each community, and returns a value ranging from 0 (low value for biodiversity conservation) to 1 (high value). Typically, several filters are applied to the landscape and then integrated in a weighted linear combination. Weights are supplied by the user to reflect the relative importance of each filter for each community. This process results in a final “biodiversity value” for each point in the landscape. Intermediate results are saved to facilitate analysis—thus one can examine not only a map of the final biodiversity values, but maps of road intensity, natural community patch area, soil series diversity within forested areas, and so on. Hierarchical Community Levels Biodiversity value may be assessed at three hierarchical community levels (Table 1). At the lowest level are primary communities, which consist of some 60 natural communities as defined by the Massachusetts Natural Heritage and Endangered Species Program. These natural communities are aggregated into about twenty secondary communities based on wildlife habitat use. Finally, secondary communities are aggregated into three tertiary communities: Forests, Nonforested Uplands, and Wetlands and Aquatic Communities. Thus, each point on the landscape is a member of a primary community, a secondary community, and a tertiary community. Analysis may be done at any of these three levels. Filters do not apply to developed land—all cells corresponding to developed land cover types are given a 2 Biodiversity Filters biodiversity value of zero, even though we recognize that even developed land may contribute to the conservation of biodiversity. Undeveloped Blocks Finally, at each of the three community levels, biodiversity value is assessed for undeveloped blocks. Undeveloped blocks are conservation units of undeveloped land consisting of mixed communities surrounded by development and major roads. A separate set of block filters operates on these undeveloped blocks, primarily acting as summaries of the biodiversity values of their component primary, secondary, and tertiary communities. Filter Groups Filters are organized into four groups (Table 2): Composition filters evaluate the rarity, richness, or evenness of natural communities or abiotic values in the focal patch, without regard to the context of the patch. Spatial character filters evaluate the shape or configuration of a patch, without regard to its composition or context. Context filters evaluate the composition and configuration of the neighborhood surrounding each point in a community. Condition filters evaluate negative effects (usually anthropogenic disturbance) on the ecological integrity of each point in a community, based on the composition and configuration of the neighborhood. Several condition filters evaluate points in aquatic communities based on upstream effects, such as developed land cover within a point’s watershed. Point and Patch Filters Some filters are applied to a single point on the landscape; others apply to a community patch. Pointbased filters are applied one 15 m pixel at a time, based on the context and condition of each cell. Patchbased filters evaluate composition and spatial character of an entire patch (all contiguous pixels) of a community or block; thus all pixels in a patch are assigned the same biodiversity value. A patch is defined as a group of contiguous cells of the same community type (or in the same undeveloped block). Combining Biodiversity Values Results from biodiversity filters are integrated in weighted linear combinations. The user supplies weights to reflect the relative importance of each filter for each community. Biodiversity values within each group are multiplied by their weights and added together. These linear combinations are nested: first, all filters are combined within each group (composition, spatial character, context, and condition). Then, these four groups are combined to represent biodiversity value at the current community level. This biodiversity value is then combined with the context from higher community levels. Biodiversity values are combined in the nesting outlined in Table 2, resulting in six final values at each point: the community biodiversity value at each of the three community levels, and the undeveloped block value at each level. Community context The value of a higher-level patch influences the value of the lower-level patches it contains. Thus, a patch of hickory – hop hornbeam forest (at the primary level) will be of higher value for biodiversity if it is part of a high-valued patch of transitional hardwood forest (at the secondary level). This is reflected by including a community context value for primary communities (consisting of secondary and tertiary Biodiversity Filters 3 contexts) and for secondary communities (tertiary context). These context values consist of the biodiversity value from non-redundant filters at these higher levels. Linear Fragmenting Features For most natural communities, a small dirt road or a first-order stream probably doesn’t represent a patch boundary—individuals or populations of most species can easily cross such features. Thus a network of forest streams doesn’t fragment the forest in any meaningful sense. On the other hand, interstate highways and large rivers represent fragmenting features for most communities—a patch of forest on the north side of I-90 is not meaningfully contiguous with a patch on the south side. Patchbased filters are sensitive to the definition of a patch (e.g. patch area, which assigns a higher value to one large patch than to two small ones). The classes of roads and streams that are treated as fragmenting features may be set individually for each community and for undeveloped blocks at each of the three community levels. Stream communities are considered to be fragmented by all road classes. Scaling with Logistic Functions Several of the filters scale measures such as distance, area, or intensity with logistic functions. We chose logistic functions because (1) they return values between 0 and 1; (2) they are fairly intuitive and straightforward to parameterize; and (3) they provide a reasonable approximation of ecological processes. For instance, the effect of a two-lane road on surrounding land may be at a maximum for the first 30 meters or so, then fall off to zero around 100 meters (Fig. 1). Logistic functions are scaled by two parameters, the inflection point, which determines the horizontal position of the curve, and the scaling factor, which determines how steeply or shallowly the curve rises or falls (Fig. 2). By choosing appropriate parameters, logistic curves can approximate linear, exponential, and threshold relationships. high 1.0 Effect of road 0.8 0.6 0.4 0.2 none 0.0 0 20 40 60 80 100 120 Distance from road (m) Fig. 1. Logistic model of ecological effect of a road on surrounding land. 4 Biodiversity Filters a. b. Inflection point (d50) = 25 Scaling factor (ds) = 5 1.0 1.0 0.8 0.8 0.6 Change in inflection point y 0.4 d50 0.6 Inflection point (d50) = 15 d50 y 0.4 ds 0.2 0.2 0.0 0.0 0 10 20 30 40 50 0 10 x 20 30 40 x Change in scaling factor c. d. Scaling factor (ds) = 2.5 1.0 Positive logistic function y 0.8 0.6 y x d50 0.4 ds 0.2 Negative logistic function y 0.0 0 10 20 x 30 40 50 x Fig. 2. Scaling logistic functions. (a) Logistic functions are scaled with two parameters: the inflection point and the scaling factor. (b) The inflection point (d50) is always the value of x at which y = 0.5; it determines the horizontal location of the curve. (c) The scaling factor (ds) is the distance along the x-axis from d50 to the point at which y = 0.75; it determines the steepness of the curve. (d) Positive logistic functions increase from 0 to 1 as x increases; negative logistic functions decrease from 1 to 0 as x increases. 50 Biodiversity Filters 5 Table 1. Targeted tertiary (underlined), secondary (boldface), and primary communities (bulleted). Mapped communities will be a subset of these; some primary communities may be combined. Terrestrial communities follow NHESP’s Natural Community Classification. Forested Communities Boreal forest High Elevation Spruce-Fir Forest Spruce-Fir-Northern Hardwoods Forest Northern hardwood Forest Northern Hardwoods-Hemlock-White Pine Forest [<75% coniferous] Rich Mesic Forest Forested Seep Calcareous Forested Seep Successional Northern Hardwoods Temperate conifer forest Northern Hardwoods - Hemlock - White Pine Forest [> 75% coniferous] Successional White Pine Oak - Hemlock - White Pine Forest [>75% coniferous] Hemlock Ravine Community Mixed transitional forest Red Oak - Sugar Maple Transition Forest Mixed Oak Forest Oak - Hickory Forest Dry, Rich Acidic Oak Forest Hickory - Hop Hornbeam Forest Yellow Oak Dry Calcareous Forest Oak - Hemlock - White Pine Forest [< 75% coniferous] White Pine - Oak Forest Pitch Pine - Oak Forest Mixed transitional woodland Ridgetop Chestnut Oak Forest / Woodland Black / Scarlet Oak Forest / Woodland Acidic Talus Forest / Woodland Circumneutral Talus Forest / Woodland Calcareous Talus Forest / Woodland Floodplain forest Transitional Floodplain Forest Small-River Floodplain Forest Major-River Floodplain Forest High-Terrace Floodplain Forest Cobble Bar Forest Forested wetland Red Maple Swamp Black Ash Swamp Hemlock - Hardwood Swamp Spruce - Fir Boreal Swamp Spruce - Tamarack Bog Black Ash - Red Maple - Tamarack Calcareous Seepage Swamp Nonforested Uplands Shrubland Scrub Oak Shrubland Pitch Pine / Scrub Oak Ridgetop Pitch Pine / Scrub Oak Powerline Shrubland Grassland Sandplain Grassland Cultural Grassland Cliffs Acidic Rock Cliff Circumneutral Rock Cliff Calcareous Rock Cliff Rocky Summits Acidic Rocky Summit / Rock Outcrop Circumneutral Rocky Summit / Rock Outcrop Calcareous Rocky Summit / Rock Outcrop Wetlands & Aquatic Communities Palustrine Shrub Swamp Circumneutral Shrub Swamp Level Bog Kettlehole Level Bog Acidic Shrub Fen Highbush Blueberry Thicket (Level Bog) Acidic Graminoid Fen Calcareous Seepage Marsh Calcareous Basin Fen Calcareous Sloping Fen Wet Meadow Kettlehole Wet Meadow Shallow Emergent Marsh Deep Emergent Marsh Pond Oxbow Backwater Vernal Pool (data not available in this version) Riverine High-gradient Headwater High-gradient 1st / 2nd order High-gradient 3rd order Medium-gradient Headwater Medium-gradient 1st / 2nd order Medium-gradient 3rd order Medium-gradient 4th order Low-gradient Headwater Low-gradient 1st / 2nd order Low-gradient 3rd order Low-gradient 4th order Low-gradient 5th order Lacustrine Lake 6 Biodiversity Filters Table 2. Biodiversity filters at three community levels. TERTIARY COMMUNITY Community biodiversity value Community model Composition Community rarity Community richness Community evenness Abiotic richness Abiotic evenness Land history Spatial Character Patch area Relative patch area Core area Relative core area Context Similarity Proximity Distance to water Streamflow distance to water Connectedness Condition Edge effects Road intensity Development intensity Watershed road intensity Watershed development intensity Point-source pollution Upstream road crossings Watershed impoundment Point impounded Undeveloped block Composition Community richness Abiotic richness Abiotic evenness Abiotic rarity Spatial Character Block area Block extent Condition Mean biodiversity value Median biodiversity value Maximum biodiversity value Biodiversity threshold SECONDARY COMMUNITY Community biodiversity value Community model Composition ... Spatial Character ... Context ... Condition ... Tertiary community context Undeveloped block Composition ... Condition ... Context ... PRIMARY COMMUNITY Community biodiversity value Community model Composition ... Spatial Character ... Context ... Condition ... Secondary community context Tertiary community context Undeveloped block Composition ... Condition ... Context ... 7 Input Coverages II. INPUT COVERAGES Input coverages for biodiversity filters consist of several parallel grids that represent the entire watershed as a collection of 15 meter cells. Land cover grids at the primary, secondary, and tertiary levels are the principal input data used by most filters. Undeveloped areas are classified into natural communities, based on classification of satellite and other remotely-sensed data, terrain analysis, and extensive ground-truthing. Natural communities are classified at three hierarchical levels: primary (ca. 60 natural communities), secondary (ca. 20 communities), and tertiary communities (forested, nonforested uplands, and wetlands/aquatic). Terrestrial and wetland communities follow NHESP’s Natural Community Classification. Lentic waterbodies are classified as ponds or lakes based on size and trophic status. Lotic waterbodies are delimited by stream link (run between stream junctions, lentic waterbodies, or dams), and classified by the order and gradient of each stream link Developed land is from UMass Resource Mapping Project’s 1985/1999 Land Use layer, classified into five land use intensities (high-intensity urban, low-intensity urban, high-density residential, lowdensity residential, and agricultural). Railroads and five classes of roads are also included. Abiotic layers represent aspects of each point in the landscape not explicitly represented in the Land Cover grids. They include: SLU (soil landform unit), elevation, slope, aspect, lithology, soil depth, soil drainage, soil texture, and soil pH. These abiotic grids are available in both classified derived forms (e.g., soil depth, drainage, texture, and pH) and in original raw forms (e.g., soil series). These abiotic grids may be used in the rarity, richness, and evenness filters. Flow grids representing the flow of streams and surface flow throughout the watershed are used by several filters for aquatic communities. Other layers represent dams, impoundments, point-sources of water pollution, forest land use history and old-growth stands. These coverages are described with the filters that use them. III. COMMUNITY FILTERS Composition Community rarity – Rarity measures how rare (and presumably imperiled or important to biodiversity) a community type is. At the primary community level, rarity is measured at two scales: State rarity (based on Natural Heritage state rarity ranks, S1-S5) and Local rarity, which is calculated empirically, based on the maximum of area- and frequency-based rarity. Area-based rarity is the proportion of the cells of the primary community grid in each community type. Frequency-based rarity is the proportion of patches in each community type. State and local rarity are combined based on user-supplied weights to give a final weighted rarity metric. At the primary level, the rarity filter is calculated similarly to other filters; however, instead of being combined with other filters in a weighted linear combination, primary rarity is used to weight each community in generating the map of biodiversity value. At the secondary and tertiary community levels, the rarity metric returns the maximum primary rarity value for the patch. 8 Community Filters Community richness – Community richness measures the number of different lower-level communities present in a higher-level patch (e.g., primary communities in a secondary patch). A weight may be assigned to each community within a patch to represent that community’s contribution to biodiversity value, thus allowing particularly important communities to be given more weight. By default all communities are weighted equally. Weighed richness is computed as the sum of weights of the communities present within the patch. At the secondary community level, community richness is applied to primary communities within each secondary patch. At the tertiary level, community richness is applied to secondary communities within each tertiary patch. Community richness is not available at the primary community level. Community richness is a relative metric—it is always rescaled from 0 to 1 within each community. Community evenness – Evenness measures the equitability in area among the component communities, without consideration of their configuration. Simpson’s evenness index is applied to component communities in each patch of each community at the current level. At the secondary community level, community evenness is applied to primary communities within each secondary patch. At the tertiary level, community evenness is applied to secondary communities. Community evenness is not available at the primary community level. Community evenness is a relative metric— it is always rescaled from 0 to 1 within each community. Abiotic richness – A weight may be assigned to each class of each abiotic layer within a patch to represent the contribution of that class to biodiversity value. By default all classes are weighted equally. Weighed richness is computed as the sum of weights of the components present within the patch. Each class of each abiotic layer may be weighted individually for each community. Each component of abiotic richness is a relative metric—each abiotic richness metric is rescaled from 0 to 1 within each community. After rescaling, all abiotic richness metrics are integrated in a weighted linear combination. Abiotic evenness – For each abiotic layer, Simpson’s evenness index is applied to abiotic classes in each patch of each community at the current level. Each component of abiotic evenness is a relative metric—each abiotic evenness metric is rescaled from 0 to 1 within each community. After rescaling, all abiotic evenness metrics are integrated in a weighted linear combination. Land history – Land History measures the value given to a patch by primary or old growth forest. A weight is assigned to each land history class (second growth, primary, or old growth); this metric returns the weighted proportion of the patch in each class. Land history is a relative metric—it is always rescaled from 0 to 1 within each community. Spatial Character Patch area – Patch area measures the absolute size of a functional patch. The area of each patch (in hectares) is scaled by a community-specific logistic function. Relative patch area – Relative patch area is the size of a patch relative to the largest and smallest patches of that community in the watershed. This metric ranges from 0 (for the smallest patch in each community in the watershed) to 1 (for the largest). Core area – Core area refers to the interior area of a patch that is free of edge-effects. Core area is simply the area of a patch minus the area within the specified distance of each unique patch edge. Community Filters 9 Edge distances are based on the 75th percentile of the logistic functions supplied for each community in the Edge Effects filter. Core area is scaled by a community-specific logistic function. Relative core area – Relative core area is the relative version of core area; it is calculated the same as core area, but rather than being scaled with a logistic function, it is scaled relatively within each community. This metric ranges from 0 (for the patch with the smallest core area in each community in the watershed) to 1 (for the largest). Context Similarity – Similarity is a measure of the amount of contrast between the community type at the focal cell and those of its neighborhood. Contrast is defined for each pair of community types based on differences in floristics, vegetation structure, naturalness, etc. Presumably, points of a particular community that are surrounded by similar communities act as larger patches for many component species, whereas points surrounded by high-contrast communities act as islands. Similarity is computed as the complement of the mean contrast between the community type at the focal cell and the communities at neighboring cells, weighted by a logistic function of distance. At each level, the contrast between each pair of communities is computed empirically based on the Mahalanobis distance among abiotic and spectral layers. Similarity is a relative metric—it is rescaled from 0 to 1 within each community. Proximity – Proximity is a measure of the proximity of selected nearby communities that increase the value of the focal community. For each focal community, cells of other nearby communities are weighted individually and scaled by a logistic function of distance from the focal cell. Distance to water – Many terrestrial organisms depend on streams, ponds, and wetlands; thus cells near water may have a higher value for biodiversity than those far from water. Distance to water is treated separately from proximity to other land cover types because hydrologic features are especially important, and because streams, as linear features, do not occupy (much) area in the land cover map, and thus are underrepresented in the area-based Proximity metric. The distance to a waterbody of each class (lotic, lentic, and wetlands, either seasonal or permanent) is calculated for the focal cell. This distance is scaled separately for each hydrological class using a negative logistic function. The result is the maximum logistic-scaled value. Streamflow distance to water – This metric is used for temporary or seasonal streams as well as for wetlands that are likely to be connected to permanent streams via intermittent streams. It is similar to the distance to water filter, but it measures distance downstream along the flow grid rather than using Euclidean distance. The hydrological distance to a permanent waterbody of each class (lotic, lentic, and wetlands) is calculated for the focal cell. This distance is scaled separately for each hydrological class using a negative logistic function. The result is the maximum logistic-scaled value. Connectedness – Connectedness measures the connectivity between each focal cell and surrounding cells. A hypothetical organism in a highly connected cell can reach a large area with minimal crossing of “hostile” cells. This filter uses a least-cost path algorithm to determine the area that can be reached from each focal cell. The focal cell gets a community-specific “bank account,” which represents the distance a hypothetical organism could move through the focal community type. Each land cover class (including the focal community) is assigned a travel cost, based on the contrast matrix. The algorithm then creates a least-cost hull around the focal cell, representing the maximum distance that can be moved from the cell until the “bank account” is depleted. The total area in this least-cost hull is then scaled relatively within the watershed for each community, such that the cell 10 Community Filters that can reach the least area has a connectedness of zero, and the cell that can reach the most area has a connectedness of one. Condition Edge effects – Edge effects represent the adverse effects of certain edges on the integrity of patch interiors; that is, factors that negatively intrude on the patch from its surroundings, such as changes in microclimate, access to nest predators, or sources of invasive exotics. Edge effects on an individual cell are indexed by the distance from the focal cell to the nearest edge weighted by the type of edge. For each community, all other community types, developed land classes, and road classes may be assigned to one of five edge effect classes. The distance to the nearest edge of each class is calculated for the focal cell. This distance is scaled separately for each edge class using a negative logistic function. The edge effects metric is then calculated as the minimum of the logistic-scaled distances. Note that the edge effect classes and distances defined for this metric are used to derive edge distances for the Core Area and Relative Core Area filters as well. Road intensity – Roads can have a number of negative effects on the integrity of a patch, including road kills, pollution from vehicles, salt runoff, and increased human access. The road intensity index is based on the proportion of the neighborhood (based on a logistic function of distance) in each road class. The index is weighted by road class, combined in a linear function, and scaled by a logistic function. Development intensity – Agriculture, residential development, and urban development have many detrimental effects, including pesticides, human-commensal predators, sources of invasive exotics, increased human presence, and high vehicle density. The development intensity index is based on the proportion of the neighborhood (based on a logistic function of distance) in each development class. The index is weighted by development class, combined in a linear function, and scaled by a logistic function. Watershed road intensity – The intensity of roads in the watershed of an aquatic community is an index of water quality, hydrological disruption, and disturbance. Watershed road intensity is similar to the road intensity filter, but it is calculated for the watershed above an aquatic point, rather than in a circular window. The “window” for this metric is all cells that are upflow in the flow grid. Note that this metric is not explicitly scaled by distance, but is implicitly scaled by the dilution factor introduced as the number of cells in the watershed increases. Watershed road intensity is based on the proportion of the window in each road class, combined in a linear function weighted by road class, and scaled by a logistic function. Watershed development intensity – As with watershed road intensity, watershed development intensity is similar to development intensity, but is based on cells in the watershed of the focal cell. Watershed development intensity is based on the proportion of the watershed in each development class, combined in a linear function weighted by development class, and scaled by a logistic function. Point-source pollution – This metric measures the intensity of actual or potential point sources of pollution in the watershed above an aquatic point, as well as past toxic spills. For actual current discharge points, the point-source pollution metric is based on NPDES-permitted million gallons per day (MGD) discharge into streams per 100 km2 watershed area. Discharge rates are parameterized separately for municipal sewage and industrial sources. For potential sources, the metric is based on the number of underground storage tanks per 100 km2 in the watershed above the focal point. Historical toxic spills are based directly on pollution concentration mapped at the focal cell (in the Housatonic watershed, this data represents General Electric’s PCB discharges into the Housatonic Community Filters 11 River, based on a smoothed map of PCB concentration measured in sediments in the river and floodplain). Intensity of pollution sources is scaled for each of the four classes (municipal discharge, industrial discharge, underground tanks, and toxic spills) with negative logistic functions, and the complement of the maximum value is taken. Upstream road crossings – Upstream road crossings can have a significant effect on the hydrology of a stream. This metric counts the number of upstream road crossings per kilometer below any upstream dams. Crossings are counted only in stream beds (using the stream flow grid), not in the watershed. Each road class is weighted separately, and the number of crossings per kilometer is scaled by a logistic function. Watershed impoundment – This metric is based on the proportion of the watershed above the focal point that is impounded by dams. Point impounded – This metric simply measures whether a point is part of an impoundment maintained by a downstream dam. IV. UNDEVELOPED BLOCK FILTERS Undeveloped block filters are applied to each road and development-bounded undeveloped block. These filters are all patch-based. The act primarily as summaries of biodiversity value at each community level. The biodiversity value for each undeveloped block is a weighted combination of composition, spatial character, and condition. Composition Community richness – This metric gives the richness of communities in the undeveloped block, weighted by the maximum biodiversity value for each community in the block. Block community richness is scaled by the observed richness among all blocks across the watershed. Abiotic richness – This metric gives richness of classes of any of the abiotic layers within the undeveloped block. Each class of each abiotic layer may be assigned a weight to indicate its relative importance to biodiversity. Block abiotic richness is scaled by the observed richness within each abiotic layer among all blocks across the watershed. After rescaling, relative richness for each abiotic layer are combined in a weighted linear function to produce an overall abiotic richness metric. Abiotic evenness – Simpson’s evenness index is computed for classes of any of the abiotic layers in each undeveloped block, giving a measure of the evenness of class representation. Block abiotic evenness is scaled by the observed evenness within each abiotic layer among all blocks across the watershed. After rescaling, relative evenness for each abiotic layer are combined in a weighted linear function to produce an overall abiotic evenness metric. Abiotic rarity – Each class of any abiotic layer may be assigned a value based on the empirical rarity of that class throughout the watershed. The rarity indices for all selected abiotic layers are integrated in a weighted linear combination. 12 Undeveloped Block Filters Spatial Character Block area – The size of an undeveloped block is a partial determinant of the integrity and function of the communities within it. Block area is calculated as the size of the block in hectares and is scaled with a logistic function. Block extent – Block extent refers to the spatial extent of a block unrelated to how convoluted it is. Block extent is based on the radius of gyration, which is the mean distance from each cell to the patch centroid. A compact patch has a small radius of gyration, and an elongated patch of the same area has a larger radius of gyration. For patches of the same shape, a larger area will result in a larger radius of gyration. Block extent thus measures how far across the landscape a block extends. Block extent can be useful as a measure of connectivity because a large radius of gyration implies that organisms can travel a greater distance across the landscape without crossing roads or developed land. Condition Mean biodiversity value – The mean biodiversity value for all cells in the undeveloped block. Median biodiversity value – The median biodiversity value for all cells in the undeveloped block. Maximum biodiversity value – The maximum biodiversity value of cells in the undeveloped block. This metric can be used to pick out blocks that contain land of high value, regardless of the overall value of the block. Biodiversity threshold – Proportion of cells in the block with biodiversity value greater than a userspecified threshold.