A6221_Balloon_Ground_Launch
advertisement

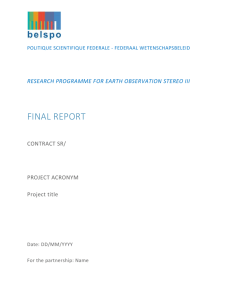
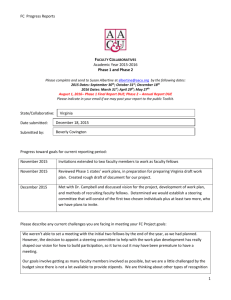
AAE 450 Project Bellerophon A.6.2.2.1 Balloon and Ground Launch p.g.1 A.6.2.2.1 Balloon and Ground Launch The steering law is one of the most crucial problems in our project. A slight change in the steering law affects the ∆Vdrag, ∆Vgravity and the eccentricity of the orbit; therefore, the rocket will not be able to be in an acceptable orbit without a good sub-optimal steering law even if its propulsion provides with enough ∆V. Although we eventually incorporate the spherical Earth model, the aerodynamic drag due to the atmosphere, and the gravity field as a function of altitude, the starting point of the construction of the steering law was to consider the flat Earth problem without drag. This simplified problem is a well-defined two point boundary value problem, which is analytically solvable by forming Hamiltonian and applying Euler-Lagrange equations, Transversality condition and Weierstrass condition. The optimal solution obtained is the Linear Tangent Steering Law1: tan at b (A.6.2.2.1.1) where is the steering angle, t is time, and a and b are the coefficients. The Linear Tangent Steering Law is the optimal steering law for the flat Earth when there is no atmosphere, that is, what we call “the flat Moon”. As the steering laws that private companies and the governmental space agencies actually use are not published in public, we decide to apply the Linear Tangent Steering Law for our ground and balloon launches. We recognize that it is not the optimal steering law any more when we apply it to the spherical Earth model with atmosphere; however, we also assume that the difference is small enough to treat the Linear Tangent Steering Law as a good sub-optimal steering law. We implement the steering law in our ordinary-differential-equations-solvers and numerically integrate our equations of motion for each stage. Also, our rocket flies vertically without any steering for the first ten seconds of the first stage, so we do not need to implement the steering law for the very first part of the flight. Figure A.6.2.2.1.1 shows how we measure the steering angles and depict the final steering angles of each stage, which numerically define our steering law. Figure A.6.2.2.1.2 shows the steering law versus time when the final steering angles at first, second and third stages are 40°, -20° and Author: Junichi Kanehara AAE 450 Project Bellerophon A.6.2.2.1 Balloon and Ground Launch p.g.2 -50° respectively. We should note that the initial steering angle is 88° rather than 90° since the tangent function is undefined at 90°. Fig. A.6.2.2.1.1: Schematic of the steering angle at the end of each stage. (Amanda Briden) Fig. A.6.2.2.1.2: Sample of the plot of steering law versus time. (Amanda Briden) Author: Junichi Kanehara AAE 450 Project Bellerophon A.6.2.2.1 Balloon and Ground Launch p.g.3 By changing the final steering angles at each stage degree by degree, we are able to find the suboptimal steering law that makes it possible to attain the theoretical orbit with the eccentricity of as small as 0.0055. In the section A.6.2.3 Optimization, we will discuss how we actually deal with the computationally expensive process, which requires running the entire trajectory code once for each set of the final steering angles, by using a normal PC in the year 2008 rather than an expensive super computer. In the process of choosing the launch type, ground launch or balloon launch, we needed to compare the corresponding ∆Vdrag and ∆Vtotal. We had not had the final structural configurations yet when we did the analysis on the week 5 of the project, and we did not have a sub-optimized trajectory for each case either. However, the following results are still valid since the trend never changes for our launch vehicles regardless of the modifications since the week 5. Table A.6.2.2.1.1 Delta V Comparison Payload [kg] 0.2 1.0 5.0 0.2 1.0 5.0 Launch type Balloon Balloon Balloon Ground Ground Ground ∆Vdrag 21 21 20 2,904 2,899 2,875 ∆Vtotal 10,027 10,011 9,932 14,033 13,978 13,711 Units m/s m/s m/s m/s m/s m/s Table A.6.2.2.1.1 shows ∆Vdrag of the ground launch is bigger than that of the balloon launch by the factor of 150, and ∆Vtotal of the ground launch is significantly bigger since ∆Vdrag is the major source of ∆Vtotal. Although, the accuracy in the numerical values is not perfect, as we use the preliminary analysis on the week 5, it is obvious that the balloon launch has a very big advantage in reducing ∆Vdrag. Our final configurations of small, medium and big launch vehicle, whose payloads are 0.2 [kg], 1 [kg] and 5 [kg], for the balloon launch need ∆Vdrag of 6 [m/s], 6 [m/s] and 4 [m/s] respectively, and they need ∆Vtotal of 9,313 [m/s], 9,379 [m/s] and 9,354 [m/s]. This result validates that our preliminary analysis on the week 5 are numerically close enough to our final results; therefore, Author: Junichi Kanehara AAE 450 Project Bellerophon A.6.2.2.1 Balloon and Ground Launch p.g.4 we confidently conclude that the balloon launch is better than the ground launch in terms of ∆Vtotal, which exponentially affects the total cost of our launch vehicles. References: 1 Longuski, J.M. “AAE 508 Optimization in Aerospace Engineering Lectures,” Purdue University, West Lafayette, IN, January 2008. Author: Junichi Kanehara