Timing-Error Minimization of Optoelectronic Pulse Signals
advertisement

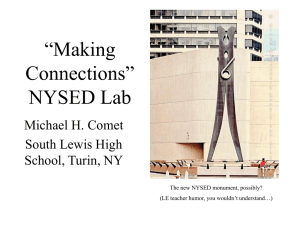
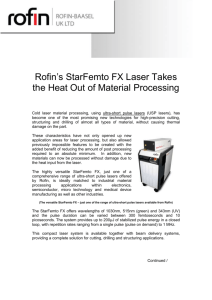
Timing-Error Minimization of Optoelectronic Pulse Signals Božidar Vojnović Laboratory for Stochastic Signals and Processes Research, Division of Electronics, Rudjer Bošković Institute, Bijenička 54, 10000 Zagreb, Croatia e-mail:vojnovic@irb.hr Abstract – In optical distance measurements, using time-of-flight techniques, associated time interval is defined by start and stop pulse signals. Measurement error depends strongly on timing-error of stop optoelectronic pulse signal. The pulse processing and pulse timing circuits, based both on charge-controlled properties of step-recovery diode properties were optimised in a way to achieve minimum timing-error. The system is very suitable to achieve picosecond resolution in timing pulses having longer rise-times. 1. INTRODUCTION In optical (laser) distance measurements, using time-of-flight techniques, associated time interval is defined by start and stop pulse signals. In the analysis it was supposed that the start signal is fully deterministic, very sharp and precisely defined in time. The stop signal in general case is stochastic, described by parameters; amplitude, rise-time and associated additive noise. The problem of high-resolution timing of stochastic pulses has been treated extensively in many scientific and technical areas: nuclear spectroscopy, radar ranging, optical (laser) distance/displacement measurements, laser altimetry, optical communications etc. [1,2,3,4,5]. These analysis were focused mostly on two main separate topics: (1) influence of the stochastic pulse parameters on pulse timing-error, assuming the ideal timing discriminator and (2) development of new timing-discriminator circuits and their optimisation depending on the application and desired time resolution. In this paper an attempt was made to optimise previously described method [6], which functionally integrate detecting and processing circuits with timing discrimination circuit. The analysis was made under the following presumptions: (1) Optical pulse signal is stochastic, but its arrival-time is considered jitter free; (2) Gaussian, white noise characterizes optical and electronic noise sources; (3) Signal processing circuits belong to the class of linear time-invariant filters; (4) System output pulse has to be bipolar, and time discrimination occurs at signal zero-crossing point; (5) Timing discriminator does not belong to the class of regenerative circuits, thus avoiding the effect of triggering charge (energy) sensitivity. 2. PULSE PROCESSING-DISCRIMINATION SYSTEM ANALYSIS 2.1. Criteria for timing-error minimization Pulse signal timing is a part of wider area of stochastic pulse arrival-time (timedelay) measurements, which belong to the class of stochastic signal parameters estimation problems. Different criteria were considered here to study estimation error minimization. (1) Maximum likelihood (ML) criterion was widely applied in stochastic signal amplitude and time-delay estimation [4, 8]. The idea was to use ML criterion to find out the impulse-response function h(τ) of the optimum filter (optimum estimator), which minimizes pulse timing-error. The problem was analysed for the case of signal accompanied with white, Gaussian noise, as well as for the case where the signal is non-stationary Poisson process. In both examples it was assumed the pulse width is mach shorter than the observation time. The minimum error was obtained at the time point, which maximizes signal output from the optimum filter. This method thus is not very applicable for nanoseconds pulse widths and required sub-nanosecond time resolution. (2) Minimum error-rate approach attempts to find out the filter that) minimizes the mean-number of zero-crossings of the noise component of the stochastic signal. This method could be interesting in the case when the “spike” noise is predominant. Theoretically white (current) noise contains the series of random positive and negative pulses qiδ(t1), where δ(t) is Dirac delta-function, qi and ti are stochastic variables (charge content and arrival-time of each pulse). The mean number of the noise zero-crossings is [11] is defined as: F h N 2 1 R 0 C 2 Ryy 0 yy h h d 0 h d (1) 2 0 where: c is a constant, h(τ) and h(τ) are the impulse response function of the noise filter and its second derivative, Ryy(τ) and Ryy(τ) are the auto-correlation function of the noise at the filter output and its second derivative respectively. Minimum of the functional F[h(τ)] gives us h(τ) that minimizes N , which is well known “cusp” shaped function. Because h(τ) is unipolar function, as it is also pulse signal, zero-crossing timing is not possible and timing is amplitude sensitive. The optimal timing point is not explicitly defined and depends on the point where the noise-to-signal slope ratio has a minimum. (3) Minimum square-error criterion [10] leads to maximization of signal-tonoise ratio, which in the timing case means minimization of signal variation (noise)-to-signal slope ratio. This criterion is more appropriate approach if the signal variations (noise) are much slower than the signal rise-time. The analysis results in optimum (matched) filter that minimizes pulse timing-error against signal variations for assumed ideal timing discriminator circuit. To find optimum impulse response function h0(τ) the following expression should be minimized t2 s2 t 2 d S t dt t Tm (2) where Tm is a timing point and σs2 is the input signal variance which includes effects of statistical processes of optical signal generation, propagation and detection. The denominator in (2) represents squared average signal slope. From expression (2) a functional G=G[h(τ)] could be made and minimized, which gives us h0(τ) of the optimum timing filter. The general solution, which is of our interest, has the form d S t 1 h0 S t t T d m (3) where α is a factor indicating relative noise at the system input. 2.2. Theory of system operation The system will be analysed under the condition »S(Tm-τ), which is valid for larger optical distance measurements. In this case response of the filter has the form h0(τ) = S(Tm-τ). The same result [5] was obtained replacing signal variance by noise variance in equation (2). The timing measurement chain contains the following essential parts: (1) optical signal detector (sensor); (2) electronic pulse preamplifier; (3) signal pre-processing circuit and (4) filter-discriminator circuit. Optical detector and preamplifier have to convert optical signal into electronic one with minimal response time and timing-jitter as well as with maximum signal-to-noise ratio. As the preamplifier noise is usually “coloured”, the preprocessing filter is aimed to “whiten” this noise, making simpler synthesis of filter-discriminator circuit to achieve minimum timing-error of the output pulse. Impulse response function of the whole optimum filter is thus convolution of impulse response functions of all parts in the chain. Detector signal, containing charge Q, was considered as current impulse, i(t) = Qδ(t). The input noise has two components: voltage and current white noises, having power spectraldensities Ne/2 and Ni/2 respectively. We consider detector-preamplifier part as a low-pass, single-pole circuit, thus the whitening filter is pole-zero cancellation circuit. Output of the filter could be approximated by the signal v(t)=Q/C Te-t/c and white voltage noise with Ne/2, τc2=CT2Ne/Ni, where τc is the “noise-corner” time constant, CT is the total input capacitance of the detector-preamplifier circuit. The impulse response function of the system (optimum filter) is first derivative of “cusp” shaped function, having time constant τ and shifted in time by Tm [5,9]. The impulse response function hs(τ) of the proposed system (Fig.1) with step-recovery diode represents, under certain, realizable conditions, good linear approximation of the h0(τ) of the theoretical (unrealisable) optimum timing filter. Step-recovery diode circuit is based on switching properties of step-recovery diode, a P-I-N junction structure, that acts as a charge-controlled switch. Diode forward current, static or transient, injects the charge into the diode. When this charge is being removed by the reverse pulse current, the diode continues conducting (low impedance state) until all the charge is removed. At the point when the total amount of charge in the diode becomes zero, it stops conducting (high impedance state) very abruptly. In our system the input current signal injects the charge into unbiased diode. The same pulse inverted and amplified by a factor k, starts after well-defined delay-time td to remove the stored charge. At the moment Tm when the total charge becomes zero, we get the sharp edge pulse having rise-time less than 100 ps, which gives us the time reference relying very strongly on pulse arrival-time. In the analysis it is assumed that the diode is “ideal” current integrator and charge zero-crossing discriminator, because the following requirements are met: (1) Injected charge is completely removed during reverse recovery phase; (2) The leakage charge due to reverse diode capacitance is negligible; (3) The minority carrier life-time could be chosen long compared to diode conducting time; (4) The diode does not exhibit charge (energy) triggering sensitivity because it does not belong to the class of regenerative circuits. hs() 1 hD() w Tm 1/ 1 1 -1 1 2 1 Figure 1. Impulse response function of the system 2 1 w k-1 1 Figure 2. Impulse response function of DL-SRD circuit That is important especially for slower pulse discrimination, because there is no time-walk due to different signal slope at the point of discrimination; (5) The diode is true time zero-crossing discriminator, thus avoiding the problem of initial discrimination level adjustment and stability. The best ultra-fast, low noise preamplifiers have rise-time in the order of nanosecond, integrating time-constant could be some milliseconds and τc is usually in the range 10-100 nanoseconds. Under these conditions, the proposed system could be realized simply by combination of pulse amplifiers, delay lines (DL) and step-recovery diode (SRD) with minority carrier life-time constant τmc greater than 100 ns. As the diode acts as an integrator, the DL-SRD circuit has impulse response function as on Fig.2. If the relation τc»Tm is valid, the input of DL-SRD circuit sees the step voltage of the amplitude Vs= Q/CT and white voltage noise with Ne/2. The timing-error variance is, consequently t2 1 N C2 N w e 2 T w 2e 2k 1 Q Vs 2k 1 (4) 2.3. Discussion of results Calculation of timing-error with some realistic example of signal and circuits parameters (τw=20ns, N e =1nV/ Hz , Q=10pC, CT=100pF, k=5), gives us σT= 0.5ps. This result was obtained under the assumption of idealized circuits, as indicated before and without calculation of SRD noise contribution to timing error. Nevertheless, we can say that the proposed method is capable to achieve picosecond timing-resolution against the noise influence. Regarding the amplitude and rise-time variation as well as triggering charge sensitivity, we can conclude the following;(1) the method is insensitive to pulse amplitude variations;(2) For linear signal-rise at the DL-SRD timing circuit input, system is fairly insensitive to rise-time variations;(3) Timing discriminator does not exhibit triggering charge sensitivity, because SRD is non-regenerative discriminator circuit. The simplified version of DL-SRD circuit was tested in two types of measurements;(1) static, measuring time-walk ΔT against pulse amplitude and rise-time, and (2) dynamic, measuring statistical distribution of output pulse time-delay. Obtained results gave us ΔT =04ns, with amplitude and rise-time dynamics of 10:1, (20-200ns). Standard deviation of timing-error was calculated from measured time spectra (pdf of delay-times), and we got 120ps, 220ps and 300ps in three measurements with input pulse rise-times of 100ns, 220ns and 500ns respectively. The pulse amplitude dynamics was 10:1. 3. CONCLUSION The proposed DL-SRD timing circuit (charge balanced discriminator) is very suitable for applications in longer range optical distance measurements. Theoretical analysis and experimental results have shown that the method assures picosecond time-resolution even with wider pulse signals of several hundreds of nanoseconds, exhibiting significant insensitivity against signal amplitude and rise-time variations. REFERENCES [1.] E. Gatti, V. Svelto, “Optimum Filter for Timing Scintillation Pulses”, Nuclear Instruments and Methods, Vol. 39, pp. 309-313, 1966. [2.] J. Llacer, “Optimum Filter for Determination of the Position of an Arbitrary Waveform in the Presence of Noise”, IEEE Transactions On Nuclear Science, Vol. NS-28, No.1, pp. 630-633, 1981. [3.] E. Gatti, S. Donati, “Optimum Signal Processing for Distance Measurements with Laser”, Applied Optics, Vol. 10, No.11, pp. 2446-2451, 1971. [4.] G. Lee, G. Schroeder, “Optical Pulse Timing Resolution”, IEEE Transactions On Information Theory, pp. 114-118, 1976. [5.] B. Vojnović, “Resolution Improvement of Stochastic Pulse Arrival-Time Determination”, Ph.D. Dissertation, Faculty of Electrical Engineering, University of Zagreb, Zagreb 1973. [6.] B. Vojnović, “A Subnanosecond Timing Circuit Using Snap-off Diode”, Compte rendus du Colloque sur l'Electronique nucleaire, pp. 59-1 to 59-7, Versailles, 10-13 Sept. 1968., Paris [7.] B. Vojnović, Private communication [8.] R.N. Donough, A.D. Wahlen, “Detection of Signals in Noise”, 2nd Edition, Academic Press, New York 1995. [9.] M. Konrad, “Detector Pulse Shaping for High Resolution Nuclear Spectroscopy”, IEEE Transactions on Nuclear Science, NS-15, No.1, pp268, 1968. [10.] V. Radeka, N. Karlovac, “Least-Squared Error Amplitude Measurements of Pulse Signals in Presence of Noise”, Nuclear Instruments and Methods, Vol.52, pp.86-92, 1967. [11.] J.S. Bendat, A.G. Piersol, “ Random Data, Analysis and Maesurements Procedures”, 2nd Edition, John Wiley & Sons, New York, 1986.