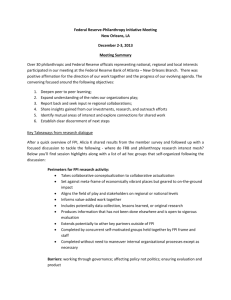
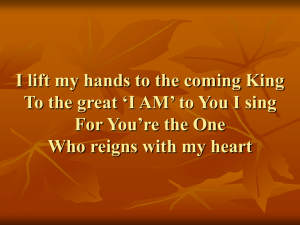
3. System Requirements
advertisement

SPICA FOCAL PLANE INSTRUMENT (FPI) INTERFRACE CONTROL SPECIFICATIONS (ICS) JAXA-SPICA-SYS-ICS-0002 January 8th, 2010 (draft) Japan Aerospace Exploration Agency DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :2 Document Change Record February 18, 2009 June 16, 2009 September 4, 2009 November 4, 2009 November 6, 2009 November 16,2009 November 16,2009 December 4-7, 2009 December 21, 2009 December 29, 2009 January 8, 2010 JAXA-SPICA-FPI0002 draft, First Edition ICS-FPI working draft ToC revised incl. AOCS requirement AOCS described by Mitani-san FPI-E resources updated MIR, SCI operation modes added FPI-E & thermal , optical resources are updated FPI-E resources are updated Release to pre-project team. Preliminary draft of AIV/T and model philosophy is added. FPI cold volume updated. Document ref. no. corrected. FPI-E tables (page 40-41) are corrected FPIA (FPI assembly) is now defined DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :3 List of Acronyms: AT Acceptance Test BLISS Background-Limited Infrared-Submillimeter Spectrograph CRYO Cryogenic Subsystem FPC Focal-Plane Camera for guider(-S), for science (-G) FPI Focal Plane Instruments IOB Instrument Optical Bench IOBA IOB assembly ( IOB & IOB bipods, pick-off mirror module & 6K shield ) FPIA FPI Assembly (=IOBA+FPI) MIRACLE Mid-InfRAred Camera w/o Lens MIRMES Mid-Infrared Medium-resolution Echelle Spectrometer MIRHES Md-infrared High-resolution Echelle Spectrometer QT Qualification Test SAFARI SPICA Far-infrared Instrument SCI SPICA Coronagraph Instrument SPICA Space Infrared Telescope for Cosmology and Astrophysics STA SPICA Telescope Assembly DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :4 Table of Contents 1. Scope ......................................................................................................................................................................................... 6 2.Applicable Documents & Reference Documents ......................................................................................... 6 3. System Requirements ................................................................................................................................................... 6 3.1 FPI Description .......................................................................................................................................................... 6 3.1.1 Intruduction ........................................................................................................................................................ 6 3.1.2 MIRACLE ............................................................................................................................................................. 7 3.1.3 MIRMES................................................................................................................................................................ 8 3.1.4 MIRHES ................................................................................................................................................................ 8 3.1.5 SCI............................................................................................................................................................................. 8 3.1.6 SAFARI .................................................................................................................................................................. 9 3.1.7 BLISS ...................................................................................................................................................................... 9 3.1.8 FPC ........................................................................................................................................................................... 9 3.2. Pointing Control .....................................................................................................................................................10 3.2.1 Definitions ..........................................................................................................................................................10 3.2.2 Aspect Angle Constraints ........................................................................................................................11 3.2.3 Pointing Control Modes .............................................................................................................................12 4.FPIA Mechanical Interface Requirements....................................................................................................20 4.1 Overview .....................................................................................................................................................................20 4.2 Coordinate system .................................................................................................................................................20 4.2.1 Spacecraft Coordinate System ..............................................................................................................20 4.2.2 Spacecraft Body Coordinate System .................................................................................................21 4.2.3 IOB Coordinate System.............................................................................................................................22 4.2.4 FPI Coordinate System .............................................................................................................................22 4.2.5 FPC-G Coordinate System ......................................................................................................................22 4.3 Cold Volume, Mass requirement from FPIs .........................................................................................22 4.3 Mass property ...........................................................................................................................................................23 4.4. FPIA configuration ...............................................................................................................................................24 4.5 Disturbance Management ................................................................................................................................25 4.6.1 Disturbance Source in FPIA ..................................................................................................................25 4.6.2 Disturbance Susceptibility ......................................................................................................................25 4.6 Mounting Conditions ..........................................................................................................................................25 4.7 Alignment ..................................................................................................................................................................25 4.8 Surface Treatment and Surface Roughness .........................................................................................25 4.9 FPI Handling, Installation .............................................................................................................................25 5.FPIA Thermal Interface ............................................................................................................................................26 5.1 Overview .....................................................................................................................................................................26 5.2 Heat generation and thermal lift requirements ..............................................................................27 5.3 Parasitic Heat from Harness ........................................................................................................................36 6. FPIA Optical Interface ............................................................................................................................................38 6.1 Definitions ...................................................................................................................................................................38 DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :5 6.2 Field-of-view(FOV) configuration ................................................................................................................38 6.3 Alignment Requirements ..................................................................................................................................38 6.4 Aspect angle Constraints ..................................................................................................................................38 7.Electrical Interface .......................................................................................................................................................39 7.1 Overview .....................................................................................................................................................................39 7.2 Interface Connectors, Wire Harness ........................................................................................................39 7.3 FPI control Electronics (Warm) ..................................................................................................................39 7.4. SCI-AOCS I/F ..........................................................................................................................................................43 8. Onboard Data Handling Interface ......................................................................................................................43 8.1 Definitions ...................................................................................................................................................................43 8.2 Command Interface...............................................................................................................................................43 8.3 Telemetry Interface...............................................................................................................................................43 9. Dynamical Interface .....................................................................................................................................................43 9.1 Definitions ...................................................................................................................................................................43 9.2 Flexibility Parameters ........................................................................................................................................43 10. FPIA Development and Verification ...............................................................................................................43 10.1 Overview ....................................................................................................................................................................43 10.2 Model philosophy .................................................................................................................................................44 10.3 Analyses .....................................................................................................................................................................44 10.4 Testing ........................................................................................................................................................................44 10.4.1 Overview ...........................................................................................................................................................44 10.4.2 Electrical Functional Test Requirements...................................................................................44 10.4.3 EMC Test Requirements .......................................................................................................................44 10.4.4 Structural Test Requirements for FPIA ......................................................................................44 11. Product Assurance ......................................................................................................................................................45 12. Programme Requirements.....................................................................................................................................46 Appendices................................................................................................................................................................................46 DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :6 1. Scope This document describes the interface conditions as well as the resource allocation for SPICA Focal Plane Instrument (FPI) assembly (hereafter FPIA), namely mechanical, optical and thermal I/Fs with the Cryogenic Subsystem (CRYO) and SPICA Telescope Assembly (STA), and also electrical I/F (including resources for FPI warm electronics, such as power consumption according to their operational modes) with the spacecraft bus system. 2.Applicable Documents & Reference Documents [AD-1] JAXA-SPICA-SYS-ICS-0003 SAFARI Interface Control Specification (ICS-SAFARI) [AD-2] ICS-BLISS [AD-3] ICS-FPC [AD-4] RSE-SP08001A SPICA Mission Requirement Document [AD-5] JAXA-SPICA-SYS-ICS-0001 INTERFACE CONDITIONS FOR SPICA TELESCOPE ASSEMBLY (STA) [RD-1] JAXA-SPICA-IF0002 SPICA ENVIRONMENTAL CONDITIONS FOR SPICA TELESCOPE ASSEMBLY (STA) [RD-2] SPICA-FPI-2008-001 Request for Input to SPICA Focal Plane Instruments Resource Allocation Study “Cycle-1” 2008/09/29 3. System Requirements 3.1 FPI Description 3.1.1 Intruduction The Focal Plane Instruments (FPI) onboard SPICA shall be attached to the STA via the Instrument Optical Bench (IOB, see Figure 4-1) which is thermally lifted at ~4.5K by a J-T cooler. The FPIs are consisted by following MIRACLE (Mid-InfRAred Camera w/o Lens) MIRMES (Mid-IR medium-resolution echelle spectrometer) MIRHES (Mid-IR high-resolution echelle spectrometer SCI (SPICA Coronagraph Instrument) SAFARI (SPICA Far-infrared Instrument) BLISS (Background-Limited Infrared-Submillimeter Spectrograph) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :7 FPC (Focal-plane finding camera) 3.1.2 MIRACLE 3.1.2.1 Instrument Hardware Overview 3.1.2.2 Operating Modes MIRACLE consists of two channels (MIR-S and MIR-L), which will be operated simultaneously (tbd).CPUs controlling MIRACLE may also handle MIRMES and MIRHES (tbd). Here we tentatively describe the operation modes commonly defined for MIRCLE, MIRMES, and MIRHES. MODE: POWER-OFF Primary power is shut-down, nothing are working in this mode. MODE: STANDBY-1 Primary power is ON, instruments are not powered (waiting for power-ON), thus CPUs are in HALT state. Command handling and HK data generation is in MINIMUM level. MODE: STANDBY-2 CPU is running, instruments except for detectors are powered. Heat dissipation from detector arrays to cold stages is SMALL (less than 10% of the FULL (see below). Command handling is possible, HK data are FULLy generated. Electronics power is also FULLy required (4W per detector array) MODE: ON-1 Detectors are also powered, and operated normally. High-speed science data are not generated, and no command requests for AOCS are generated. Heat dissipation to cold stage is FULL (1mW per detector array). MODE: ON-2 Mode for science observations. High-speed data are generated, and command requests for AOCS are generated. Heat dissipation to cold stage is FULL (1mW per detector array) MODE: ANNEAL Detectors are heated to ~20K in very short time in order to recover the bad pixels due to the cosmic ray hit. The ammont of heat generation(OVER-FULL), dissipation time-constant for the cold-stages are tbd. Table 3.1-1 describes the change of the status of the Warm Electronics Power, Heat Dissipation at Cold Stage, Command & HK data generation, and Science Data Generation, according to the operation modes. Table. 3.1-1 The status changes according to the MIRACLE operation modes Mode Warm Electronics Power Heat Dissipation at Cold Stage Command & HK data generation Science Data Generation POWER-OFF OFF OFF OFF OFF DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :8 STANDBY-1 small (tbd) OFF MINIMUM OFF STANDBY-2 FULL SMALL FULL OFF ON-1 FULL FULL FULL OFF ON-2 FULL FULL FULL ON ANNEAL FULL Over-FULL FULL OFF In any MIRACLE observations, the operation mode is “ON-2”, while, other observation is under-way, MIRACLE is in stand-by with “ON-1” operation mode. 3.1.2.3 Observing Modes Imaging-Mode Spectroscopic-Mode(MIR-S) Spectroscopic-Mode(MIR-L) 3.1.3 MIRMES 3.1.3.1 Instrument Hardware Overview 3.1.3.2 Operating Modes Same as 3.1.2.2 3.1.3.3 Observing Modes Spectroscopic-Mode (MIRMES Arm-Short) Spectroscopic-Mode (MIRMES Arm-Long) 3.1.4 MIRHES 3.1.4.1 Instrument Hardware Overview 3.1.4.2 Operating Modes Same as 3.1.2.2 3.1.4.3 Observing Modes Spectroscopic-Mode (MIRHES S-mode) Spectroscopic-Mode (MIRHES L-mode) 3.1.5 SCI 3.1.5.1 Instrument Hardware Overview DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :9 3.1.5.1.1 SCI 3.1.5.1.2 C-FPC C-FPC (Coronagraph Focal Plane Camera) is a special guide sensor for coronagraph observation. The C-FPC detects a target star through the C-TTM and output an error angle for pointing correction including C-TTM control error. Prior to initiating C-TTM control, C-FPC output is feed forward to AOCS in order for the C-TTM to acquire the target star within the C-TTM actuation range. After activating the C-TTM control, C-FPC needs to detect both alignment error (low freq.) and mechanical disturbance (high freq.). It is expected that the C-FPC can detect the mechanical disturbance in high frequency, because it detects relatively bright stars for coronagraph observation. 3.1.5.1.3 C-TTM C-TTM (Coronagraph Tip-Tilt Mirror) is a pointing control device dedicated for coronagraph observation. The C-TTM can realize high pointing accuracy and high pointing stability that cannot be achieved solely by a conventional AOCS. The C-TTM is controlled by the error angle (including mechanical disturbance) detected by the C-FPC. 3.1.5.2 Operating Modes Mostly the same as 3.1.2.2., specific operating mode for SCI is under consideration. 3.1.5.3 Observing Modes imaging-Mode Spectroscopic-Mode 3.1.6 SAFARI SAFARI’s instrument overview, operation & observation modes are described in [AD-1]. 3.1.7 BLISS BLISS’s instrument overview, operation & observation modes are described in [AD-2]. 3.1.8 FPC FPC’s instrument overview, operation & observation modes are described in [AD-3]. FPC-G (Focal Plane Camera for Guidance) is a guide sensor on board to the IOB (Instrument Optical Bench), and it is commonly applied to all observations for improving pointing accuracy and pointing stability. The FPC-G detects guide stars whose relative DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :10 position to an target star is already known, and output the error angle by which target star should be located in the center of a FPI sensor. The FPC-G is not capable of high frequency output because it must detect faint stars, and hard to detect internal mechanical disturbance due to such as cryogenic and starling coolers. More detail information are described in [AD-3]. 3.2. Pointing Control 3.2.1 Definitions 3.2.1.1 Definition of pointing performance The required pointing performance are defined as follows. The coordinate system used as reference is defined in section 4.2. Figure 3.2-1 illustrates relationship among the pointing control accuracy, the pointing stability, and the pointing determination accuracy in time domain. • • • The Pointing Control Accuracy is the angular separation between the true pointing angle and the desired direction of the reference coordinate frame. The Pointing Stability is the change of the angular separation between the true pointing angle and the desired direction of the reference coordinate frame over a given period of time. The Pointing Determination Accuracy is the angular separation between the a true pointing angle and the reconstructed direction (posteriori) of the reference coordinate frame. Fig.3.2-1 Time Domain Definitions 3.2.1.1 Definition of pointing settling time in step mode DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :11 Pointing Settling Time in step mode is defined as the durarion time from the beginning of step mode until the time when the condition to start the next pointing mode is satisfied. poinitin settling time depends on step angle magnitude. The condition to start the next pointing mode follows; • The condition in which pointing control error/pointing stability is within the specified value continues more than thespecified time duration. - In the case of sending attitude stability notification based on on-board judgment, the condition is judged by on-board attitude determination values. - The angle tolerance could be specified regardless of the pointing accuracy and pointing stability requirement. Pointing settling time Angle Time for settling judgment Angle Tolerance Time Fig.3.2-1 Definition of pointing settling time in step mode 3.2.2 Aspect Angle Constraints 3.2.2.1 Sun angle constraints During the nominal mission, one constraint is the roll angle defined as the rotation around the Xs-axis being zero when the sun is in the Ys-Zs plane. This roll angle shall be limited to +5 deg (no margin) (+Zs direction, towards the sun) and –30 deg (-Zs direction, away from the sun), (TBD) (Fig. 3.2-2). A second constraint is the yaw angle defined as the rotation around the Zs-axis being zero when the sun is in the Xs-Ys plane. This roll angle shall be limited to +/- 2 deg, (TBD). Any additional (temporary) constraints, e.g., spacecraft-moon angles, are TBD. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :12 Zs 5 deg (no margin) Xs Ys 30 deg Permissible sun direction *1 *1 Angle between the sun direction and Ys-axis along Zs-axis should be within +-2 deg. Fig.3.2-2 Aspect Angle Constraints (TBD) 3.2.2.2 FPC-G’s FOV constraints Constraints for step angle are 3’x3’about Xs, Ys-axis based on FOV of FPC-G. And for the same reason, other poiniting performance shall be specified if the angle which equals scan speed times scan duration time is over FOV of FPC-G. 3.2.3 Pointing Control Modes [Assumption Conditions] (1) More than two FPI operations are not performed at the same time. (2) Observation duration of each FPI is from a few days to a week. (3) Observation operation is fundamentally an on-board automatic operation based on the operation plan uploaded from the ground, we do not perform real time operations from the ground. 3.2.3.1 Definitions of Modes Definition of operation mode in each observation mode are described in Table 3.2-1. And AOCS operation mode and mode transition are shown in Fig. 3.2-3. Table 3.2-1 Definition of operation mode in each observation mode Operation Mode Pointing Mode Step Mode Definition This is a mode to observe fixed stars against the inertial frame. It is achieved by pointing the telescope boresight toward the apparent star. This is a mode for moving from an arbitrary pointing direction to the next adjacent direction. We do not perform observations while moving the pointing direction. After Remarks This mode requires aberration correction about the direction of apparent star. This mode is designed for attitude maneuvers up to a few arcmin. This sequence of motion is repeated as many times as DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :13 attitude maneuvering and attitude settling, the next pointing observation starts. This is a mode to observe a comet. It is achieved by pointing the telescope direction to the apparent star. This is a mode to observe a star by scanning the pointing direction with constant speed and direction against the inertial frame. It is achieved by pointing the telescope direction to time varying apparent target direction. This is a mode to change the pointing direction. We do not observe through attitude maneuvers. We adjust the mission system and spacecraft system for the preparation of the subsequent pointing observation. This is a mode to downlink data to ground systems by attitude maneuver and pointing HGA to the ground, in case of breakdown of the driver system of X band HGA. We do not observe in this mode. This is a mode to adjust the focus in the focal plane by driving the telescope’s secondary mirror. This mode is operating in the initial checkout phase. This is a mode for searching a target stars by raster scanning the FOV. This mode corrects relatively large alignment error in the initial checkout phase, in case unexpected alignment shift occurs. Non-sidereal Tracking Mode Slow-scan Mode Attitude Maneuver Mode Down-link Operation of Observation Data Telescope Focus Adjustment Mode Raster Scan Mode (TBD) Separation necessary. This mode requires correction of parallax and aberration about the direction of apparent star. This mode requires aberration correction about the direction of apparent star. Attitude Maneuver Safe Attitude (Canonical Attitude) rate damping Sun Acquisition of Y-axis direction RCS unloading Anomaly 2 Initial attitude acquisition Normal Attitude Control Orbit Control AOCS Pointing Attitude acquisition about the Y-axis FPC-G Pointing Coronagraph Pointing Deployment of Solar Array Paddle Pointing PR Attitude ReAcquisition Anomaly 1 Step Sun Acquisition of Y-axis direction Pointing Non-sidereal Tracking Slow-scan Attitude acquisition about Y-axis Run-up of RW Event Thruster Control Mode RW Control Mode Non-sidereal Tracking DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :14 Fig.3.2-3 AOCS operation mode and mode transition 3.2.3.2 Pointing Mode Requirements Pointing accuracy requirements in each observation mode are described in Table. 3.2-2. Table 3.2-2 Pointing accuracy requirements in each observation mode Observation mode MIR camera (Ch1) imaging-mode MIR camera (Ch2) imaging-mode MIR camera (Ch3) imaging-mode MIR camera (Ch4) imaging-mode MIR camera (Ch1) spectroscopic-mode MIR camera (Ch2) spectroscopic-mode MIR camera (Ch3) spectroscopic-mode MIR camera (Ch4) spectroscopic-mode MIR spectrometer (HIRES S-mode) MIR spectrometer (HIRES L-mode) MIR spectrometer (LWS Arm-Short) MIR spectrometer (LWS Arm-Long) SAFARI (SPECObserve Mode) SAFARI(PHTObserve Mode) BLISS dispersion Absolute pointing control accuracy [arcsec] Axis of rotation X, Y Z 18 (3σ) 18 (3σ) 18 (3σ) 18 (3σ) 18 (3σ) 18 (3σ) 18 (3σ) 18 (3σ) Pointing stability [arcsec](0-P) /time Axis of rotation X, Y Z 0.075 / 200[sec] 0.075 / 200[sec] 0.12 / 200[sec] 0.12 / 200[sec] 0.21 / 200[sec] 0.21 / 200[sec] 0.39 / 60[sec] 0.39 / 60[sec] 0.135 (3σ) 0.135 (3σ) 0.135 / 200[sec] 0.135 / 200[sec] 0.22 (3σ) 0.22 (3σ) 0.225 / 200[sec] 0.225 / 200[sec] 0.405 (3σ) 0.405 (3σ) 0.405 / 200[sec] 0.405 / 200[sec] 0.57 (3σ) 0.57 (3σ) 0.57 / 200[sec] 0.57 / 200[sec] 0.72 (3σ) 0.72 (3σ) 0.18 / 1000[sec] 0.18 / 1000[sec] 1.20 (3σ) 1.20 (3σ) 0.30 / 1000[sec] 0.30 / 1000[sec] 1.11 (3σ) 1.11 (3σ) 0.28 / 1000[sec] 0.28 / 1000[sec] 2.28 (3σ) 2.28 (3σ) 0.57 / 1000[sec] 0.57 / 1000[sec] described in [AD-1]. described in [AD-1]. described in [AD-2]. Pointing accuracy requirements in pointing mode are described in Table. 3.2-3. Pointin control accuracy is specified based on MIR camera (Ch1) spectroscopic-mode. And pointing stability is specified based on MIR camera (Ch1) imaging-mode. Table 3.2-3 Pointing accuracy requirements in pointing mode Requirements Pointing control accuracy Pointing stability Performance Axis of rotation X, Y Z 0.135[arcsec] 0.135[arcsec] (3σ) (3σ) 0.075[arcsec] 0.075[arcsec] (0-P)/200sec (0-P)/200sec Remarks Dispersion requirement from MIR camera Imaging requirement from MIR camera DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :15 3.2.3.3 Step Mode Requirements Pointing requirements in step mode are described in Table. 3.2-4. The settling time determines as described in section 3.2.1.1. Step mode direction is about Xs-axis, Ys-axis or combination with Xs and Ys-axis. step mode direction about Zs-axis shall not be operated because of the aspect angle constraints described in section 3.2.2. Step mode operation shall be planned considering the sun angle constraints. Table 3.2-4 Pointing accuracy requirements in step mode Observation mode MIR camera (Ch1)imaging-mode MIR camera (Ch2)imaging-mode MIR camera (Ch3)imaging-mode MIR camera (Ch4)imaging-mode MIR camera (Ch1)spectroscopic-mode MIR camera (Ch2)spectroscopic-mode MIR camera (Ch3)spectroscopic-mode MIR camera (Ch4)spectroscopic-mode MIR spectrometer (HIRES S-mode) MIR spectrometer (HIRES L-mode) MIR spectrometer (LWS Arm-Short) MIR spectrometer (LWS Arm-Long) SAFARI(SPECObserve Mode) SAFARI(PHTObserve Mode) BLISS Step angle [arcsec] Step angle accuracy [arcsec] Step direction (Defined as 2 dof about FOV direction) Pointing settling time after Step within [sec] 0.075-5.4 0.075 arbitrarily 100 0.12-9.0 0.12 arbitrarily 100 0.21-16.2 0.21 arbitrarily 100 0.39-22.8 0.39 arbitrarily 30 0.135-0.27 0.135 arbitrarily 100 0.225-0.45 0.225 arbitrarily 100 0.405-0.81 0.405 arbitrarily 100 0.57-1.14 0.57 arbitrarily 100 0.18-1.75 0.18 arbitrarily 500 0.30-3.0 0.3 arbitrarily 500 0.28-2.75 0.28 arbitrarily 500 0.57-5.4 0.57 arbitrarily 500 described in [AD-1]. described in [AD-1]. described in [AD-2]. 3.2.3.4 Non-sidereal Tracking Mode Requirements Pointing requirements in non-sidereal tracking mode are described in Table. 3.2-5. These pointing requirements are bascally equivalent to those in pointing mode except for observation mode has not non-sidereal tracking mode. And additional required pointing performance about this mode are described in Table 3.2-6. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :16 Table 3.2-5 Pointing accuracy requirements in non-sidereal tracking mode Observation mode MIR spectrometer (HIRES S-mode) MIR spectrometer (HIRES L-mode) MIR spectrometer (LWS Arm-Short) MIR spectrometer (LWS Arm-Long) MIR camera (Ch1) imaging MIR camera (Ch2) imaging MIR camera (Ch3) imaging MIR camera (Ch4) imaging MIR camera (Ch1) dispersion MIR camera (Ch2) dispersion MIR camera (Ch3) dispersion MIR camera (Ch4) dispersion SAFARI (SPECObserve Mode) SAFARI(PHTObserve Mode) BLISS Absolute pointing control accuracy [arcsec] Pointing stability [arcsec](0-P) /time 0.72 (3σ) 0.18 / 1000[sec] 1.20 (3σ) 0.30 / 1000[sec] 1.11 (3σ) 0.28 / 1000[sec] 2.28 (3σ) 0.57 / 1000[sec] 18 (3σ) 18 (3σ) 18 (3σ) 18 (3σ) 0.135 (3σ) 0.22 (3σ) 0.405 (3σ) 0.57 (3σ) 0.075 / 200[sec] 0.12 / 200[sec] 0.21 / 200[sec] 0.39 / 200[sec] 0.135 / 200[sec] 0.225 / 200[sec] 0.405 / 200[sec] 0.57 / 200[sec] described in [AD-1]. described in [AD-1]. described in [AD-2]. Table 3.2-6 Tracking performance requirements in non-sidereal tracking mode Observation mode MIR camera (Ch1) imaging MIR camera (Ch2) imaging MIR camera (Ch3) imaging MIR camera (Ch4) imaging MIR camera (Ch1) dispersion MIR camera (Ch2) dispersion MIR camera (Ch3) dispersion MIR camera (Ch4) dispersion MIR spectrometer (HIRES S-mode) MIR spectrometer (HIRES L-mode) MIR spectrometer (LWS Arm-Short) MIR spectrometer (LWS Arm-Long) SAFARI (SPECObserve Mode) SAFARI(PHTObserve Mode) BLISS Tracking speed range [arcsec/sec] 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) Tracking duration [sec] 1200[sec] 1200[sec] 1200[sec] 1200[sec] 1200[sec] 1200[sec] 1200[sec] 1200[sec] 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 0.1667(=10[arcsec/min]) 1200[sec] 1200[sec] 1200[sec] 1200[sec] described in [AD-1]. described in [AD-1]. described in [AD-2]. Remark: The pointing accuracy requirement similar to pointing mode are stringent because of following reason; DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :17 - target direction model error - mosaic error which is induced when guide star is moving in FOV of FPC-G Therefore pointing accuracy requirements need to be reconsidered with total pointing performance including such a FPC-G error factors under the operational conditions. 3.2.3.5 Slow Scan Mode Requirements Pointing requirements in slow-scan mode are described in Table. 3.2-7. If the angle which equals scan speed times scan duration time is over FOV of FPC-G, other poiniting performance shall be specified as described in section 3.2.2.2. Table 3.2-7 Pointing accuracy requirements in slow scan mode Observation mode MIR camera (Ch1) imaging MIR camera (Ch2) imaging MIR camera (Ch3) imaging MIR camera (Ch4) imaging MIR camera (Ch1) dispersion MIR camera (Ch2) dispersion MIR camera (Ch3) dispersion MIR camera (Ch4) dispersion MIR spectrometer (HIRES S-mode) MIR spectrometer (HIRES L-mode) MIR spectrometer (LWS Arm-Short) MIR spectrometer (LWS Arm-Long) SAFARI (SPECObserve Mode) SAFARI(PHTObserve Mode) BLISS Scan speed range [arcsec/sec] Scan speed accuracy [arcsec/sec] N/A N/A N/A N/A N/A N/A N/A N/A 0.054-0.54 0.005-0.054 5-50 or more 0.09-0.90 0.009-0.09 5-50 or more 0.162-1.62 0.0162-0.162 5-50 or more 0.228-2.28 0.0228-0.228 5-50 or more TBD TBD TBD TBD described in [AD-1]. described in [AD-1]. described in [AD-2]. 3.2.3.6 Coronagraph Mode Requirements 3.2.3.6.1 Pointing Mode Requirements Scan duration [sec] DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :18 Pointing accuracy requirements in coronagraph pointing mode (using C-FPC/C-TTM) are described in Table. 3.2-8. Table 3.2-8 Pointing accuracy requirements in coronagraph pointing mode Requirements Pointing control accuracy Pointing stability Performance 0.03 [arcsec](3σ) 0.03 [arcsec](0-P)/20min Remarks 3.2.3.6.2 Step Mode requirements Pointing accuracy requirements in coronagraph step mode (using C-FPC/C-TTM) are described in Table. 3.2-9. The settling time determines as described in section 3.2.1.1. Step mode direction is about Xs-axis, Ys-axis or combination with Xs and Ys-axis. step mode direction about Zs-axis shall not be operated because of the aspect angle constraints described in section 3.2.2. Step mode operation shall be planned considering the sun angle constraints. Table 3.2-9 Pointing accuracy requirements in coronagraph step mode Observation mode Step angle [arcsec] Step angle accuracy [arcsec] Step direction (Defined as 2 dof about FOV direction) Pointing settling time after Step within [sec] N/A N/A N/A N/A Coronagraph observation instruments 3.2.3.6.3 Non-sidereal Tracking Mode requirements Pointing accuracy requirements in coronagraph non-sidereal tracking mode (using C-FPC/C-TTM) are described in Table. 3.2-10. And additional required pointing performance about this mode are described in Table 3.2-11. Table 3.2-10 Pointing accuracy requirements in coronagraph non-sidereal tracking mode Observation mode Coronagraph observation instruments Absolute pointing control accuracy [arcsec] Pointing stability [arcsec](0-P) /time N/A N/A Table 3.2-11 Tracking performance requirements in coronagraph non-sidereal tracking mode Observation mode Coronagraph observation instruments Tracking speed range [arcsec/sec] N/A 3.2.3.6.4 Slow Scan Mode requirements Tracking duration [sec] DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :19 Tracking performance requirements in coronagraph slow scan mode are described in Table. 3.2-12. If the angle which equals scan speed times scan duration time is over FOV of FPC-G, other poiniting performance shall be specified as described in section 3.2.2.2. Table 3.2-12 Pointing accuracy requirements in coronagraph slow scan mode Observation mode Scan speed range [arcsec/sec] Scan speed accuracy [arcsec/sec] Coronagraph observation instruments N/A N/A Scan duration [sec] DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :20 4.FPIA Mechanical Interface Requirements 4.1 Overview FPIs shall have mechanical interface at the Instrument Optical Bench (IOB) attached to STA through three kinetic mounts. IOB is the basic mechanical structural component of FPIA, made of (tentatively) aluminum. Here we define IOBA (IOB assembly) consisting of the IOB, a common pick of module (PoM) for providing telescope optical beams to the FPI entrance apertures, kinetic mounts (bipods) supporting FPIA, electric connector port, and the 6K shield protecting FPIs from stray light. The volume occupied by all FPIs is strictly limited to within a column of 2.3m diameter, 0.40m in height. The total mass of the whole FPIA must be within 200kg with 20% margin. Fig.4-1 IOB and the FPI volume 4.2 Coordinate system 4.2.1 Spacecraft Coordinate System The spacecraft coordinate system (shown in Fig. 4.2-1 ) is a right-handed, orthogonal coordinate system, defined as follows: • The origin, Os, is located at the center of the satellite/launch-vehicle separation plane (TBC). • The Xs axis completes the right-handed, orthogonal coordinate system. • The Ys axis coincides with the line pointing positively towards the sun. • The Zs axis is aligned with the launch vehicle thrust axis, pointing positively from the interface plane towards the spacecraft. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :21 Fig. 4.2-1 The spacecraft coordinate system 4.2.2 Spacecraft Body Coordinate System The spacecraft coordinate system (shown in Fig. 4.2-2 ) is a right-handed, orthogonal coordinate system, defined as follows: • The origin, OB, is located at the center of gravity. • The XB axis is parallel to Xs axis. • The YB axis is parallel to Ys axis. • The ZB axis is parallel to Zs axis. Fig. 4.2-2 The spacecraft body coordinate system DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :22 4.2.3 IOB Coordinate System The IOB coordinate system is a right-handed, orthogonal coordinate system, defined as follows: • The origin, OIOB, is located at the IOB geometric center. • The XIOB axis completes the right-handed, orthogonal coordinate system.. • The YB axis is in IOB plane and projection of nominal YB -axis to IOB plane. • The ZB axis is perpendicular to IOB plane. 4.2.4 FPI Coordinate System (Each FPI coordinate system shall be described.) 4.2.5 FPC-G Coordinate System The FPC-G coordinate system (or called reference frame) is identical to the Satellite body coordinate system when the AOCS sensors alignment error are assumed to be zero. 4.3 Cold Volume, Mass requirement from FPIs FPI Weight (kg) comment MIRACLE MIRMES 60.0 MIRHES with 20% margin SCI 30.0 FPC 10.0 SAFARI 50.0 BLISS 30.0 (optional FPI) IOB, FPI cover 50.0 with 20% margin Total 200 excluding BLISS Table 4.2-1 Cold instrument mass requested DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :23 Cold instrumental volume, and their mass requested from FPIs are summarized in Table 4.2-1 & 4.2-2. FPI Volume(cm3) MIRACLE (Ch 1, 3) 200000 MIRACLE (Ch 2, 4) 200000 MIR moderate resolution Spectrometer (ARM-L) 200000 MIR moderate resolution Spectrometer (ARM-S) 200000 MIR High-dispersion Spectrometer (LW) 24500 MIR High-dispersion Spectrometer (SW) 24500 MIR Coronagraph FPC 552233 39000 SAFARI BLISS IOB, FPI cover Total (above IOB) comment each 35x35x20 each 90% of r=125, 30x26x50 174138 93x51.3x36.5 70000 50x35x40 219800 IOB : 200cm dia. 7cm thick 1684370 86% Table 4.2-2. Cold instrumental volume requirement. 4.3 Mass property The total mass of FPIA (including the IOB) shall not exceed 200 kg (with 20% margin). The 1st lateral eigenfrequency requirement is >50Hz in any axis. IOB is tentatively considered as 200cm diameter, 7cm thick ribbed plate made of Aluminum (other material is also considered). The estimated eigenfrequencies are summarized in Table 4.3-1 (the definition of axis is given in JAXA-SPICA-IF0001). FPI center of gravity, moment of inertia shall be shown in Table 4.3-2 and 4.3-3. Table 4.3-1 FPI(incl. IOB) 1st eigen frequencies (Tentative) Instrument Mass X Y Z (kg) IOB alone 50 DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :24 Whole FPI + IOB X TBD < 200 Table 4.3-2 FPI Center of gravity Y Z TBD TBD Table 4.3-3 FPI Mass property MOI (kg・mm2) MOP (kg・mm2) Ixx Iyy Izz Jxy Jyz Jzx TBD TBD TBD TBD TBD TBD 4.4. FPIA configuration Configuration of the FPIA (cold-hardware of FPIs on IOB) in the allowed FPI volume (Fig.4-1) is shown in Fig. 4-2. . Fig.4-2 FPI configuration viewed from “Top (telescope side)” DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :25 4.5 Disturbance Management 4.6.1 Disturbance Source in FPIA 4.6.2 Disturbance Susceptibility 4.6 Mounting Conditions TBD. 4.7 Alignment Attaching surface of the FPIs on the IOB shall be the reference surface for alignment of each FPI. Details are TBD. FPI and the FPC-G reference frame shall be co-aligned. The misalignment, i.e., the angle between the optical axes of FPI and the FPC-G reference frame, shall be very small compared to the FoV of the instrument. 4.8 Surface Treatment and Surface Roughness TBD 4.9 FPI Handling, Installation Tbd, responsibility, access point etc. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :26 5.FPIA Thermal Interface 5.1 Overview Thermal conductive interface between the FPI assembly and CRYO shall be defined by the temperature of the heat strap attached to the cold finger of one of mechanical coolers of the CRYO as shown in Figure 5.1-1. Fig.5.1-1 Thermal connections in SPICA FPI is radiatively coupled with the baffle and the bottom part of telescope shell. The schematic diagram of the thermal interface between FPI and CRYO is shown in Figure 5.1-2. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :27 FPI is required to equip heat switches to disconnect itself from the cooling chain to avoid thermal short in case of unexpected failure of FPI or coolers at each connecting point to heat strap from coolers.(TBD) Fig.5.1-2 The schematic diagram of the thermal interface between FPI and CRYO 5.2 Heat generation and thermal lift requirements Total maximum heat dissipation in FPI assembly shall be less than 15mW @ 4.5K stage and 5mW @1.7K stage. Temporary maximum heat dissipation shall be less than TBD mW x TBD minutes. Heat dissipation / thermal lift requirements are summarized in Table 5.2-1~5.2-4. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :28 Total Maximum load@1.7K obs. Mode MIRACLE MIRMES MIRHES SCI FPC-S SAFARI BLISS MIRACLE 2.28 0.28 0.28 0.28 0.28 0.28 0.28 MIRMES 0.14 1 0.14 0.14 0.14 0.14 0.14 includes all loads from all the FPIs. load from each FPI MIRHES SCI FPC-S FPC-G 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 SAFARI 2 2 2 2 2 5.7 2 unit : mW BLISS 2.1 2.1 2.1 2.1 2.1 2.1 2.7 Total Average load@1.7K obs. Mode MIRACLE MIRMES MIRHES SCI FPC-S SAFARI BLISS MIRACLE 2.28 0.28 0.28 0.28 0.28 0.28 0.28 MIRMES 0.14 1 0.14 0.14 0.14 0.14 0.14 total 6.52 5.38 4.52 4.52 4.52 8.22 5.12 unit : mW load from each FPI MIRHES SCI FPC-S FPC-G 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 SAFARI 2 2 2 2 2 3.9 2 BLISS 2.1 2.1 2.1 2.1 2.1 2.1 2.5 total 6.52 5.38 4.52 4.52 4.52 6.42 4.92 Table 5.2-1 Total maximum load (top) / average load (bottom) at 1.7K stage unit : mW Total Maximum load@4.5K obs. Mode MIRACLE MIRMES MIRHES SCI FPC-S SAFARI BLISS MIRACLE 2.28 0.28 0.28 0.28 0.28 0.28 0.28 MIRMES 0.14 1 0.14 0.14 0.14 0.14 0.14 load from each FPI MIRHES SCI FPC-S 0.28 0.56 0.1 0.28 0.56 0.1 2 0.56 0.1 0.28 10.56 0.1 0.28 0.56 2 0.28 0.56 0.1 0.28 0.56 0.1 FPC-G 2 2 2 2 2 2 2 SAFARI 3 3 3 3 3 13 3 BLISS 0 0 0 0 0 0 0 MIRACLE MIRMES MIRHES SCI FPC-S SAFARI BLISS MIRACLE 2.28 0.28 0.28 0.28 0.28 0.28 0.28 MIRMES 0.14 1 0.14 0.14 0.14 0.14 0.14 8.36 7.22 8.08 16.36 8.26 16.36 6.36 unit : mW Total Average load@4.5K obs. Mode total load from each FPI MIRHES SCI FPC-S 0.28 0.56 0.1 0.28 0.56 0.1 2 0.56 0.1 0.28 10.56 0.1 0.28 0.56 2 0.28 0.56 0.1 0.28 0.56 0.1 FPC-G 2 2 2 2 2 2 2 SAFARI 3 3 3 3 3 9.7 3 BLISS 0 0 0 0 0 0 0 Table 5.2-2 Total maximum load (top) / average load (bottom) at 4.5K stage total 8.36 7.22 8.08 16.36 8.26 13.06 6.36 DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :29 MIRACLE unit Requirement Parasitic Active Total Remarks 1.7K J-T stage 1.7 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW <3 100 0.28 0.28 2 2 2.28 2.28 4.5K J-T stage 4.5 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW <6 100 0.28 0.28 2 2 2.28 2.28 Si:Sb x2, assume 1 m to 12K stage with 7 core CMN (Manganin) wiring Si:As x 2, assume 1 m to 12 K stage with 7 core CMN peak = average(neglecting filter wheel) 18K 2ST stage 18K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW 6.6 <20 1 11.2 17.8 Lift required at shield 1-3(45-95K) 45 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW 65 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW temperature stability requirement Average lift Peak lift description of thermal event/profile during the FPI operation (in free format) parasitic : instrument off active : ON, excl. parasitic 95 K temperature of stage temperature range requirement Buffer for Si:Sb x 2 + Si:As x 2, assume 10 m to 300 K stage with 7 core CMN Dissipation from filter wheel mortion is neglected Dissipation in the annealing mode is TBD K K mW mW put link information for the figure Table 5.2-3 Heat dissipation / lift requirements (MIRACLE) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :30 SCI unit 1.7K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift 4.5K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift 18K 2ST stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift Lift required at shield 1-3(45-95K) temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift description of thermal event/profile during the FPI operation (in free format) Requirement Parasitic Active Total Remarks 1.7 K K mK mW mW not applicable 4.5 K K mK mW mW 0.56 0.56 10 10 10.56 10.56 parasitic assumes 1/2 of SHI 1000 wire-harness 18K K K mW mW not applicable? 45 K K K mW mW K K mW mW K K mW mW 110.0 110.0 65 K 0.0 0.0 110.0 110.0 parasitic assumes 1/2 of SHI 1000 wire-harness 237 237 95 K 0 0 237 237 225 225 0 0 225 225 put link information for the figure Table 5.2-4 Heat dissipation / lift requirements (SCI) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :31 SAFARI unit Requirement parasitic Active Total Remarks 1.7K J-T stage K mK mW mW 1.7 K TBD TBD 2 1.9 2 3.7 3.9 5.7 K mK mW mW 4.5 K TBD TBD 3 6.7 3 10 9.7 13 temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift NEED reconsideration for NO 2.5K stage design 4.5K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift "active": 8mW w/o margin 12K 2ST stage 12K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW 0.0 0.0 13.3 30.0 13.3 30 originally estimated for 20K stage, so the worst case Lift required at shield 1-3(45-95K) 45 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW 65 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW 95 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift description of thermal event/profile during the FPI operation (in free format) K K mW mW parasitic : instrument off active : ON, excl. parasitic See Fig. 5.2-9 Table 5.2-5 Hear generation / lift requirements (SAFARI) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :32 BLISS unit Requirement parasitic Active Total Remarks 1.7K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW 1.7 K 1.6-1.8 K 100 mK 2.1 0.4 2.1 0.6 for the BLISS ADR. not a strong constraint 2.5 2.7 4.5K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW 4.5 K 1.6-1.8 K 100 mK 1.1mW Parasitic from ADR wires only for Housing modest very small 12K 2ST stage 12K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW 3.8 3.8 <14 1K 5.9 5.9 9.7 9.7 Lift required at shield 1-3(45-95K) temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K K mW mW temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift description of thermal event/profile during the FPI operation (in free format) K K mW mW 45 K 40-50 2 (0-p) per hour 3.7 1.3 5.0 3.7 1.3 5.0 65 K 60-70 K 3 (0-p) per hour 19.7 53.3 73 19.7 217 236.7 95 K 90-100 K 4 (0-p) per hour 69.7 226 295.7 69.7 835 904.7 We are assuming heat sinking at all intercept points, since this minimizes the total heat load to lower temperatures. Thermal system not sensitive to this temp. Numbers do not include any margin. A conservative margin to apply would be 50% See Fig. 5.2-10 Table 5.2-6 Hear generation / lift requirements (BLISS) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :33 MIRMES 1.7K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift 4.5K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift 12K 2ST stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift MIRHES 1.7K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift 4.5K J-T stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift 12K 2ST stage temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift unit Requirement parasitic Active Total parasitic : instrument off active : ON, incl. parasitic 1.7 K K mK mW mW 0.0 0.0 K mK mW mW 4.5 K 5.0K 100mK 0.0 1.0 0.0 1.0 3K 100mK 1.0 1.0 1.0 1.0 1.0 1.0 unit Requirement parasitic Active Total 1.7 K not applicable 4.5 K 5.0K 100mK 0.0 2.0 0.0 2.0 12K K K mW mW Remarks parasitic : instrument off active : ON, incl. parasitic K mK mW mW K mK mW mW Si:As 1kX1K x 1 Low temp to reduce dark Heat sink for wire Pre-Amp at low temp. stage 20K 1K 50.0 50.0 1.0 1.0 Temp. at detector Si:Sb 1kX1K x 1 Low temp to reduce dark Temp. at detector 12K K K mW mW Remarks 1.0 1.0 20K 1K 50.0 50.0 Temp. at detector 2.0 2.0 Si:As 1kX1K x 2 Low temp to reduce dark Heat sink for wire Pre-Amp at low temp. stage Table 5.2-7 Hear generation / lift requirements (MIRMES/MIRHES) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :34 FPC-G unit Requirement Parasitic Active Total Remarks 1.7K J-T stage 1.7 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW not applicable 4.5K J-T stage 4.5 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift FPC-S K mK mW mW unit NA NA 0 0 2 2 2 2 Requirement Parasitic Active Total based on AKARI/NIR, parasitic should be taken from MIRACLE? Remarks 1.7K J-T stage 1.7 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW not applicable 4.5K J-T stage 4.5 K temperature of stage temperature range requirement temperature stability requirement Average lift Peak lift K mK mW mW NA NA 0 0 2 2 2 2 Table 5.2-8 Hear generation / lift requirements (FPC-S/FPC-G) DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :35 Fig. 5.2-9 estimated profile of the heat loads during SAFARI cooler cycle DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :36 Fig. 5.2-10 thermal profile of BLISS cooler in operation 5.3 Parasitic Heat from Harness Harness for FPI shall be per table 5.3-1. (same as Table ????? in [AD-5] ) Table 5.3-1 FPI harness Type of wire Material Diameter (mm) Length (m) Twisted pair for general signal Shielded line for general signal Single wire for general signal Twisted pair for power line Twisted pair for motor power line Shield Manganin SUS 0.1 0.1 0.1 0.2x2 0.5x2 Aluminize d Polyester N/A 6 6 6 6 6 6 1,000 0 0 0 0 0 Mangani Manganin Manganin n Number Tota l DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :37 DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :38 6. FPIA Optical Interface 6.1 Definitions 6.2 Field-of-view(FOV) configuration Fig.6.1-1 Field-of-view sharing 6.3 Alignment Requirements 6.4 Aspect angle Constraints TBD DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :39 7.Electrical Interface 7.1 Overview Harness from STA interface connector to the electronics box shall be prepared by CRYO team. Electrical interface between the STA and the CRYO shall be STA interface connector. Conceptual drawing of the electrical interface is shown in figure 7.1-1. 7.2 Interface Connectors, Wire Harness Location and dimensions of FPI interface connectors are shown in figure TBD. CRYO FPI Control Electronics S/C’s scope FPI’s scope FPI CRYO’s scope FPI’s scope Fig. 7.1-1 Conceptual drawing of the electrical interface between CRYO and FPI 7.3 FPI control Electronics (Warm) 1) Volume, Mass Mass with 20% margin of the warm electronics (excluding the harness) are listed in Table 7.3-1. their weights. The volumes are tentatively scaled from AKARI FPI electronics, by DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :40 Function Component FPI MIRACLE MIRMES MIRHES SCI FPC SAFARI BLISS #. Pcs. Focal-Plane Array 4 Filter wheel 2 Grism wheel 2 Slit-mask changer 2 Focal-Plane Array 2 Cold Shutter 2 Focal-Plane Array 2 Cold Shutter 2 Focal -Plane Array (incl. T-T sensor) 4 Deformable mirror driver 1 tip-tilt driver (Note1) 1 Mask changer 2 Focal-Plane Array 3 Filter wheel 1 Focal-Plane Array 3 3+4He & ADR 1 Filter wheel 2 Fourier-Transform Mechanism 1 Focal-plane linear array 5 ADR 1 cold chopper 1 Total Weight (kg) Weight (kg) with 20% margin Volume [mm3] 11.3 13.6 400x300x280 6 7.2 400x300x150 6 7.2 400x300x150 21 25 400x500x200 8 10 400x300x200 24 29 ICU W380xL330xH270 DCU W380xL330xH270 23.7 28 400x600x300 100 120 --- Table 7.3-1 Mass & volume requirement of FPI warm electronics 2) Power, Heat-dissipation Power consumption of the warm electronics and the power dissipation to the spacecraft bus module are summarized in Table 7.3-2 and 7.3-3. The dissipation is assumed to be 100% of the power consumption. Note that the total power varies according to the observation mode : the observations will be executed by using a single FPI except for the focal-plane finding camera, FPC-G. FPI Function Component #. Pcs. Power (W) Power Dissipation Power (W) Power Dissipation DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :41 [ Observing ] MIRACLE MIRMES MIRHES SCI FPC SAFARI (Note 3) BLISS Focal-Plane Array 4 Filter wheel 2 Grism wheel 2 Slit-mask changer 2 Focal-Plane Array 2 Cold Shutter 2 Focal-Plane Array 2 Cold Shutter 2 Focal -Plane Array (incl. T-T sensors) Deformable mirror driver tip-tilt driver (Note1) 17 17 17 17 9 9 9 9 9 9 9 9 60 60 16 16 12 12 12 12 120 120 17 17 61 61 16 16 4 1 1 Mask changer 2 Focal-Plane Array 3 Filter wheel 1 Focal-Plane Array 3 3+4He & ADR 1 Filter wheel 2 Fourier-Transform Mechanism 1 Focal-plane linear array 5 ADR 1 cold chopper 1 Total [ Standby ] Note 2 Table 7.3-2 Electric power & heat dissipation requirement of FPI warm electronics Note 1: high-vol. (400V) is necessary for Piezo drives. Note 2 : Powers(& dissipations) are the target values, no margin is included. Also note that only a single FPI (except for FPC-G) will be used for observation. Note 3: SAFARI warm electronics consists of two units: ICU and DCU. DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :42 Obs. (Ave.) Obs.(Max.) Standby MIRACLE 17 17 17 MIRMES 9 9 9 "Standby" is defined to be the mode during the observation by other FPI. Assume MAX=average (update unit : W later) MIRHES SCI FPC-S FPC-G SAFARI BLISS 9 60 4 8 120 61 9 60 4 8 120 61 9 16 4 8 17 16 summary of total Power obs. Mode MIRACLE MIRMES MIRHES SCI FPC-S SAFARI BLISS MIRACLE 17 17 17 17 17 17 17 MIRMES 9 9 9 9 9 9 9 unit : W Power required for each FPI MIRHES SCI FPC-S FPC-G 9 16 4 8 9 16 4 8 9 16 4 8 9 60 4 8 9 16 4 8 9 16 4 8 9 16 4 8 SAFARI 17 17 17 17 17 120 17 BLISS 16 16 16 16 16 16 61 total 96 96 96 140 96 199 141 Table 7.3-3 FPI Electronics power variation according to the observation mode DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :43 7.4. SCI-AOCS I/F TBD. 8. Onboard Data Handling Interface 8.1 Definitions 8.2 Command Interface 8.3 Telemetry Interface 9. Dynamical Interface 9.1 Definitions 9.2 Flexibility Parameters 10. FPIA Development and Verification 10.1 Overview FPIA development and verification plan can be divided to the individual FPI level and the system level. In the individual FPI level, following tests shall be defined and addressed in each FPI development and test plan: (1) Item 1 (2) Item 2 (3) etc etc… The system-level test plan should take account of the critical issues as below: (a) FPI is cooled to <5K with J-T coolers under extremely careful Spacecraft thermal design. (b) disturbance and interference from J-T coolers and AOCS (such as RW, gyro) in order to assure high-sensitivity (low-noise) in orbit (c) Co-operation with FPC-G to establish the pointing stability: interferences? alignment? (d) Co-focus among FPIs (especially MIR’s) since STA 2ry cannot be adjusted so frequently in orbit By taking account of the above issues, following tests shall be defined in the system level: (a) With STM: Measure disturbance at FPI from J-T/AOCS under Spacecraft MTM test in 2014 (b) With CQM: Cooling test with J-T (PM) (in PLM (PM)) Evaluate effect of mechanical disturbances from J-T/AOCS simulator, electrical interferences among FPIs, J-T, AOCS in the latter half of FY2015 (c) With FM FPI evaluation at cold (optical & electrical) STA optical performance test at cold PLM thermal test DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :44 10.2 Model philosophy Minimum number of Models required for the system level test (in the previous page) is: FM (Flight Model) (& its spare) STM : structure thermal model CQM : cold qualification model STM : Structure Thermal Model Description: Mechanical I/F specifications (including disturbance sources) is equivalent to that of FM Required Function Same mechanical I/F specifications to FM Nearly the same thermal I/F (TBD, for spacecraft(PM) thermal test) Equipped with thermometers, acceleration sensors for measurement of I/F environmental condition Simulate mechanical disturbance according to the system operation modes CQM :Cold Qualification Model Description Nearly equivalent to FM incorporating with detectors operable at low-temperature expected in orbit Required Function Same thermal, mechanical, electrical I/F specifications to FM Equipped with detectors operable at low-temperature, with the same noise performance as that of FM Simulate heat-dissipation (load to J-Ts), mechanical disturbance according to the system operation modes 10.3 Analyses 10.4 Testing 10.4.1 Overview 10.4.2 Electrical Functional Test Requirements 10.4.3 EMC Test Requirements 10.4.4 Structural Test Requirements for FPIA (1) Stiffness >100Hz (2) Quasi-static load 25G each axis (3) Sinusoidal vibration condition 5~100Hz (4) Random Vibration 20G each axis DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :45 20~ 80Hz +6dB/oct 80~270Hz 0.7G2/Hz 270~413Hz -6dB/oct 413~800Hz 0.3G2/Hz 800~2000Hz -8dB/oct Overall 21.1Grms duration 60sec (5) Shock test level 100~1500Hz +8dB/oct 1500~4000Hz 500Gsrs Q=10 (6) Acoustic test level 1/1 Octave Sound pressure level Center frequency (Hz) (dB) Tolerance (dB) Duration (sec) 0dB=2 x 10-5 Pa 31.5 128 +3/-10*1 63 129.5 +/- 3 125 134 +/- 3 250 136 +/- 3 500 131.5 +/- 3 1000 128 +/- 3 2000 123 +/- 3 4000 118 +3/-6 8000 116 +/- 6*1 Overall 140.5 +/- 2 *1: Depends on the capacity of the test facility *2: QT level = AT level + 3 dB, Duration = 80 sec 11. Product Assurance 40 DOC. No. : JAXA-SPICA-SYS-ICS-0002 REV. : draft PAGE :46 12. Programme Requirements Appendices