Rotational Equilibrium

name____________________ period _______ lab partners___________________________________
Rotational Equilibrium
Introduction
Whenever the sum of the torques is zero, the object will not change its state of rotational motion—i.e., it will not start rotating or stop rotating or change the direction that it is rotating. It is said to be in rotational equilibrium. If the sum of the forces acting on the object is also zero, the object is in translational equilibrium and will not change its state of translational motion— i.e., it will not speed up or slow down or change its direction of motion. Whenever both of these conditions are met, Σ τ = 0 and Σ F = 0, and the object is said to be in static equilibrium. In this lab we shall consider various objects or systems of objects with respect to rotational equilibrium. In some cases we will need to position an object or objects to achieve such an equilibrium. This will typically require balancing torques--so that the positive ones (those tending to produce counterclockwise rotations) = the negative ones (those tending to produce clockwise rotations). Recall torque = force x lever arm and gravitational force F grav
--commonly called weight--is related to mass through F grav
= m g.
Purpose:
To help the student better appreciate the balance of torques needed to achieve a rotational equilibrium situation, where such situations might be encountered, and how understanding the physics behind them can have practically useful outcomes.
MATERIALS
meter stick meter stick straight edge support w/ ring stand mass hangers to mount on meter stick assorted masses (including washers) top loading balance pulley /ring stand mount / clamp, string for it mass hanger / bucket attaches to pulley binder clips to attach mass to meter stick
Procedure:
Note: The figures go with Part A (Figure #1), Part C (Figure #2), and Part D (Figure #3) of procedure.
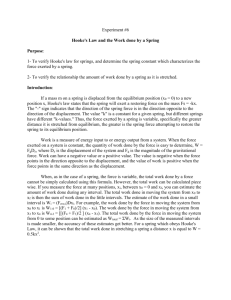
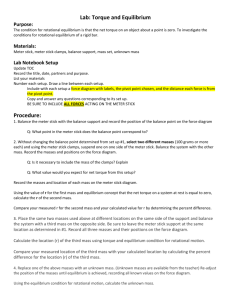
Figure #1 Figure #2
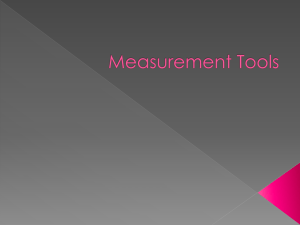
Figure #3: Modeling the Ending of "The Italian Job" -- a real cliffhanger of a movie!
preliminary: Use the top loading balance to find the mass of any small masses / clips available to attach masses whose mass is unknown. Record in the Data Table--preliminary.
A. Balancing Torques on a Meter Stick
1) Balance the meter stick on the support provided, placing its center of gravity on the support point. Record in Data Table, Part A-data the meter stick's center of gravity (the point at which the stick balances)--it should be very close to the 50.0 cm mark. This establishes the x = 0 origin of the co-ordinate system for part A.
3) Refer to Figure #1. At ~ 20-cm mark (distance x
1
= -30.0 cm to the left of the center of gravity) use a big binder clip to attach a 200 gram mass. (Note: this mass combination is m
1
). At ~ 65 cm mark (distance x
2
=
+15.0 cm to the right of the center of gravity) attach 150 grams mass using big binder clip (this combo is m
2
)
4) Do the calculations described below (put these in the Data Table, Part A-calculation)
Using the condition for rotational equilibrium (net torque equals zero), calculate the position x
3
at which the third mass combo m
3
= 100 gram + big binder clip must be placed to balance the meter stick. One possibility is the position x
3 shown in Figure #1. Since x
3 is unknown, it will be treated as a positive number--that is, the third mass is assumed to be positioned to the right of the center of gravity. Using Σ τ = 0 and
F grav
= m g ==>
m
1 g x
1
- m
2 g x
2
- m
3 g x
3
= 0.
Dividing through by g simplifies this equation. After doing that, solve it for x
3
, using known mass values and positions. (Note: x
3
<0 means assumption that it lies to the right of the center of gravity needs revising!)
Finally, determine the position x
3 of mass m
3 experimentally. (See Data Handling / Questions #1)
5) Make the drawing described below (put this in the Data Table, Part A-drawing)
Using the figure in the Data Table, Part A, insert forces (F
1
, F
2
, F
3
) associated with the gravitational force on each mass, identifying corresponding lever arms (r
1
, r
2
, r
3
) and directions of the corresponding torques.
B. Finding the Mass of a Meter Stick
1) Here you will create an equilibrium condition with the meter stick's 25.0 cm mark (not its center of gravity) on the support point. This establishes the x = 0 origin of the co-ordinate system for part B.
2). Using a big binder clip, attach a 200gram mass to the meter stick in a location that creates an equilibrium condition. Measure the position of this mass combination (we'll call it m
1
) and determine its x
1 co-ordinate.
Record in the Data Table, Part B-data.
3) Do the calculations described below (put these in the Data Table, Part B-calculation). With designations m
2 and x
2
denoting the mass and position co-ordinate for the meter stick, use the condition for rotational equilibrium (net torque equals zero), calculate the mass of the meter stick (m
2
). In doing this, realize the gravitational force associated with the meter stick's weight effectively acts through its center of gravity.
4) Make the drawing described below (put this in the Data Table, Part B-drawing)
Using the figure in the Data Table, Part B, insert forces (F
1
, F
2
) associated with the gravitational force on each mass, identifying corresponding lever arms (r
1
, r
2
) and directions of the corresponding torques.
5) Weigh the meter stick to get its mass. Record in the Data Table, Part B-data.
C. Determining an Unknown Mass
1) Position the center of gravity of the meter stick over the support pivot. Using big binder clips, attach a 50gram mass (part of m
1
) at the 70-cm mark and a 200-gram mass (part of m
2
) at the 20-cm mark. Tie the free end of the string (whose other end is attached to a mass hanger / bucket) around the 1-cm mark and hang it over the pulley as shown in Figure #2 . Add small masses to the hanger / bucket until the stick balances
(becomes horizontal). Find the mass of the mass hanger / bucket + added masses (this combo is m
3
) using the balance. Record in the Data Table, Part C-data
2) Calculate m
3
using the condition of rotational equilibrium. (Put in the Data Table, Part C-calculation)..
3) Make the drawing described below (put this in the Data Table, Part C-drawing)
Using the figure in the Data Table, Part C, insert forces (F
1
, F
2
, F
3
) associated with each mass, identifying corresponding lever arms (r
1
, r
2
, r
3
) and directions of the corresponding torques.
D. Modeling a Real Life Situation
1) (optional) Watch the two minute long "Italian Job Cliffhanger" video as directed by your instructor.
2) Using a highly simplified diagram (Figure #3) of the situation at the end of the 1969 movie The Italian
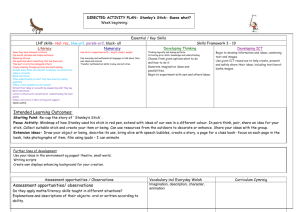
Job , prepare to model the situation with your meter stick, mass hangers, assorted masses setup. Preliminary to constructing your engineering modeling read what follows (Figure #4).
Figure #4: Modeling Preliminaries
For simplicity, we'll assume 1) The bus is 100 feet long and each cm of our meter stick represents one foot. 2) The fixed mass of the bus itself is uniformly distributed and its center of gravity rests on the point of balance (a section of damaged wall in the movie) located 50 feet from each end of the bus. 3) Each man has a mass of 75 kilograms; each bar of gold has a mass of 12.5 kg; each rock has a mass of 12.5 kg. 4) Besides the men, gold, and rocks, the only potentially significant moveable mass on the bus is its fuel. Assume the tank is full and holds 200 liters total capacity, each liter has a mass of .75 kg. Figure #3 shows the "after" equilibrium situation. You should start with the "before" equilibrium situation: A window has been smashed, the tires disabled so the bus has leveled out. There are 11 men at the front (End A) of the bus--their center of mass is in the center of the bus, 10 feet from that end. Down at the other end--the back of the bus (End B) are 55 gold bars, their center of mass is in the center of the bus,
6.75 feet from that end. Also toward the back of the bus is the centrally located fuel tank--with center of mass 30 feet from End B.
3) Using setup of Part A, employ three masses--mass 1 for men, mass 2 for gold, mass 3 for fuel--and construct a model representing the "before" equilibrium situation. Suggestion: divide real life mass by 10,000 in modeling--i.e. model 800 kilograms with 80 grams. Check (Table, Part D-data) that it works /add notes.
4) Provide a calculation that quantitatively shows the condition of rotational equilibrium. (Put in the Data
Table, Part D-calculation "before").
5) Make the drawing described below (put this in the Data Table, Part D-drawing "before")
Using the figure in the Data Table, Part D, insert forces (F
1
, F
2
, F
3
) associated with the gravitational force on each mass, identifying corresponding lever arms (r
1
, r
2
, r
3
) and directions of the corresponding torques.
6) Assume the fuel tank is drained. Redo your calculation (in 4) above) showing a new condition of rotational equilibrium can be achieved with the fuel gone and one man removed from the bus at its front.
(Put in the Data Table, Part D-calculation--"in between").
7) Model this "in between" equilibrium situation. Check (Part D-data) that it works / add notes if needed.
8) Assume the man who gets off gathers six rocks and puts them inside the bus where he had been (10 feet from End A). He then goes down to End B and stands with the gold as pictured in Figure #3.
9) Provide a calculation that quantitatively shows this "after" state of rotational equilibrium. (Put in the Data
Table, Part D-calculation--"after").
10) Make the drawing described below (put in Data Table, Part D-drawing "after") Using the figure in the
Data Table, Part D, insert forces (F
1
, F
2
) associated with the gravitational force on men / rocks at End A and man / gold at End B identifying corresponding lever arms (r
1
, r
2
) and directions of the corresponding torques.
11) Construct a model for this "after" equilibrium situation. Check (Part D-data) that it works / add notes.
Data Table
-preliminary: washer mass=___grams; big binder clip=____grams; big binder clip=____grams
A. data meter stick, c.g.
= ___cm calculation drawing
B. data x
1 coord =
____cm meter stick mass =
_______ calculation
drawing
C. data mass of hanger / bucket and contents=
_______ calculation drawing
D. data model works___ notes: calculation--before drawing--before model works___ notes: calculation--in between model works___ notes: calculation--after drawing--after
Data Handling /Questions:
Do on separate sheet . Follow final answers/discussion with your conclusion.
1) Part A: compare the two x
3
positions for m
3
(theoretical and experimental) by computing % error
2) Part B: compare measured mass of meter stick w/ theoretically calculated value by computing a % error.
3) Part C: compare the two values of m
3
--experimental and theoretical--by computing % difference.
4) Part D: Discuss (based on calculations) which of the three moments-- "before," "in between," or "after"-- is the most dangerous? (Hint: For which is the balance most precarious in terms of there being almost enough torque to send everything falling over the cliff?) Provide a quantitative comparison of the danger.
5) Part D: Conceivably, what might the mass of the meter stick in our model represent in real life?
6) Part D: How would our simple model / calculations change if a) the center of gravity of the bus was not located at the damaged wall support? b) the bus was not horizontal but tilted at a slight angle?
7) Part D: Could (thieves leader) Charlie Croker's decision-making have benefited from use of our model?
.
http://www.cnn.com/video/#/video/showbiz/2009/01/24/pkg.itn.italian.job.itn http://prospect.rsc.org/blogs/rsc/italianjobentries/winner.pdf.