Matthew Hemmerle
Experiment 8
Introduction:
This lab is conducted in order to gain familiarity with the center of gravity concept as well as test the
conditions of rotational equilibrium.
Theory:
A key concept in this lab is the center of gravity which is the point of an object that a single support can
hold up that object or “can be modeled to act from this position”. This concept is explained by the
equation, R= m1r1/ m1 where r is distance m is mass. If there is no net force on an object there will
not be any translational velocity. As a result of this the equation for translational equilibrium isF=0. If
the forces are unequal there will be a rotation which is identified as a torque. The magnitude of torque
involves distance x force. This distance is known as the level arm or moment arm. The tangential force
which acts straight down is what causes the motion. The direction of change is caused by the tangential
direction component of force. A stable object does not have a changing rotational state of motion
around any axis, the sum of torques which can be shown as =0 where is torque. Due to this the
condition of rotational equilibrium can be applied to any point which means if the net torque is zero the
sum of the external torques can be applied at any point on an object. To find the support force the
equation Fs = mg + M1g where F is force m is mass of meter stick, g is gravity M is additional mass.
Another pertinent equation will be to find the sum of torques which is, = mg xcm – Fs xs + M1g x1 = 0,
where Fs is the support force and x is the distance from where the torques are summed about, M is the
mass and g is gravity.
Procedures/Methods:
We first balanced the meter stick about its support clamp to find the center of gravity. Next we
found the mass of the meter stick, support clamps and hooks. Then we added approximately 100g to an
arbitrary point followed by moving the support clamp to find the new center of gravity. We also drew a
free body diagram to show the sum of torques.
For the next portion of the lab we attached approximately 200g to an arbitrary point leaving the
100g mass where it was. To create equilibrium we moved the support clamp. To aid in the analysis we
drew a free body diagram.
Finally, we checked the center of gravity of the meter stick with no extra masses to ensure it has
not changed and compared it to our original found center of gravity. Then we attached the 100g mass at
an arbitrary point leaving the support clamp where it was. To create equilibrium we found the point at
which we could attach the 200g mass to the meter stick that would not shift the equilibrium. To
enhance understanding of the concept we drew a free body diagram to be utilized as a visual aid.
Discussion of Results:
Analysis A:
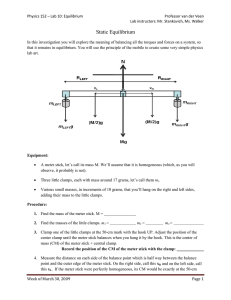
The distance to the added mass is .900 +/-.001 m at a mass of .103 +/-.001 kg. The distance to the
adjusted center of gravity is .656 +/-.001 m and the weight of the meter stick is .146 +/-.01kg and the
center of gravity is .5 +/- .001m. To find the sum of torques when equilibrium is found with a .103 kg
mass at a location of .9 m from 0 we used the sum of torques equation to find the support force which is
24.7+/-.2 N. The free body diagram allows us visualize the addition of the force of the added weights
and the meter stick weight which should be equal to the support force. We inserted the support force
into the equation and solved for the sum of torques which yielded an answer of .03 +/-.01 which is three
sigma from the theoretical value of zero so we can accept this value.
N
Weight Meter
Added Weights
Stick
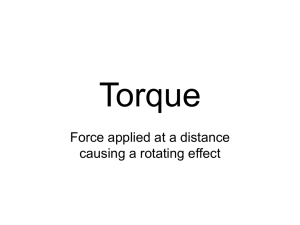
When summing the torques around the support force the same equation is used. The sum of the
torques should be zero as it is in equilibrium. The calculated value is .242 =+/-.2N which when factoring
in our uncertainty of .2 allows us to accept this value within 2 sigma.
N
Weight Meter
Stick
Added Weights
These two examples show that the condition of rotational equilibrium can be applied at any arbitrary
point because they both had a sum of torques equal to zero. However, when the torques were summed
around the support there are only two forces to calculate making it faster and easier to complete the
math.
Analysis B:
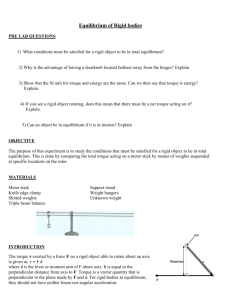
We then added a mass of .201 +/-.001 kg at a distance of .3 +/- .001m from zero. The meter stick
remains .146 kg for these calculations. With the masses at their previously mentioned distances the
center of gravity is at .502 +/- .001m. The sum of torque equation is completed just as above to first find
the support force (N) which is 4.4N. This is then plugged back into the equation to yield an answer of .01
+/-.04N. This means the calculated value is with one sigma of the theoretical value of zero.
N
Added Weight
.103 kg
Weight Meter
Stick
Added Weight
.201 kg
Analysis C:
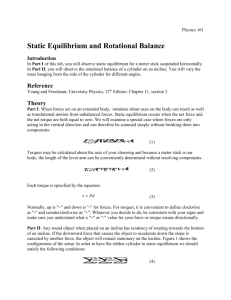
We then removed the extra masses and found the center of gravity of the meter stick to be .500 +/-.001
which is precisely the same that we found earlier. We then reattached the .103kg weight at a distance of
.85 +/- .001m from zero and attached the .201 kg weight at a place to create equilibrium. We found that
to create equilibrium the .201kg weight must be placed .320 +/-.001 m from zero. The calculated torque
is .003 +/-.004 which puts us one sigma from the theoretical value of zero. Since the support force and
the weight of the meter stick pass through the same point we are summing the forces about they will
result in no torque creating fewer calculations to be done. This same concept is used in a balance scale,
as the mass on one side should be equal to the mass on the other side if it is at equilibrium.
N
Added Weight
.103 kg
Weight Meter
Stick
Added Weight
.201 kg
 0
0