ANN based Models for Path Loss Prediction
advertisement

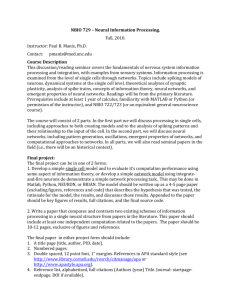
ANN based Models for Path Loss Prediction I. Popescu1, I. Nafornita2, P. Constantinou1 1 Mobile Radiocommunications Laboratory, National Technical University of Athens, Athens, Greece Tel: +30 210 7723849, Fax: +30 210 7723851, E-mail: ileana@mobile.ntua.gr; fkonst@mobile.ntua.gr 2 Faculty of Electronics and Communications Engineering, “Politehnica” University of Timisoara, Timisoara, Romania E-mail: ioan-naf@etc.utt.ro 1. Introduction Indoor radio propagation is a very complex and difficult radio propagation environment because the shortest direct path between transmit and receive locations is usually blocked by walls, ceilings or other objects. Signals propagate along the corridors and other open areas, depending on the structure of the building. In modeling indoor propagation the following parameters must be considered: construction materials (reinforced concrete, brick, metal, glass, etc.), types of interiors (rooms with or without windows, hallways with or without door, etc.), locations within a building (ground floor, nth floor, basement, etc.) and the location of transmitter and receiver antennas (on the same floor, on different floors, etc.) [1]. An alternative approach to the field strength prediction in indoor environment is given by prediction models based on artificial neural networks [2] - [6]. The problem of predicting propagation loss between two points may be seen as a function of several inputs and a single output. The inputs contain information about the transmitter and receiver locations, surrounding buildings, frequency, etc while the output gives the propagation loss for those inputs. From this point of view, research in propagation loss modeling consists in finding both the inputs and the function that best approximate the propagation loss. Given that ANN’s are capable of function approximation, they are useful for the propagation loss modeling. The feedforward neural networks are very well suited for prediction purposes because do not allow any feedback from the output (field strength or path loss) to the input (topographical and morphographical data). The presented studies develops a number of Multilayer Perceptron Neural Networks (MLP-NN) and Generalized Radial Basis Function Neural Networks (RBF-NN) based models trained on extended data set of propagation path loss measurements taken in an indoor environment. The performance of the neural network based models is evaluated by comparing their prediction error (µ), standard deviation (σ) and root mean square error (RMS) between their predicted values and measurements data. Also a comparison with the results obtained by applying an empirical model is done. 2. The measurements The measurements used to build the neural network based model were performed in the 1890 MHz frequency band, at the Hellenic Telecommunication Organization premises following different scenarios. A detailed description of the measurement procedure can be found in [8]. Each floor of the building consists of a circular sector of 60 m in circumference located at the center of each floor and 3 branches departing from the circular sector, where at each branch there are one main long corridor, two short front corridors departing from the circular sector and another two short back corridors. The offices are flanked on both sides of the main corridor and of the two short back corridors, as shown in Figure 1 [8]. The presented study includes the single floor scenario and the procedure used to select the measurement data is described below. Figure 1. The building topology and the transmitter positions In order to train the neural network the measurements collected from two branches have been used: one branch where the transmitter was always located and only one of the branches adjacent to it. The fast fading was eliminated, in the case of longitudinal measurements (along the corridors), by averaging the measured received power using a 2λ windowing technique [9]. In the case of static measurements, the average values of the recorded samples in every position of the receiver inside the offices were computed. Two values for the received power in each office (with closed doors and with open doors, respectively) were obtained for different combination of the position, height and gain of the transmitter antenna [12]. Following the filtering process of the measured data, more than 1400 measurement locations corresponding to the non-line-of-sight (NLOS) case were obtained. The performance of the neural network model is evaluated by making a comparison between predicted and measured values based on the absolute mean error, standard deviation and root mean square error. 3. The ANN Overview 3.1 Multilayer Perceptron Neural Network (MLP-NN) Figure 2 shows the configuration of a multilayer perceptron with one hidden layers and one output layer. The network shown here is fully interconnected. This means that each neuron of a layer is connected to each neuron of the next layer so that only forward transmission through the network is possible, from the input layer to the output layer through the hidden layers. Two kinds of signals are identified in this network: wji φ 1 (x) woj x1 x0 1 w1 x1 y x2 φ k (x) k wk y i ... ... ... wK xm φ K (x) xn-1 Input Layer Hidden Layer Output Layer xM K Input layer Figure 2. Configuration of the MLP H idden layer O utput layer Figure 3. RBF-NN architecture The function signals (also called input signals) that come in at the input of the network, propagate forward (neuron by neuron) through the network and reach the output end of the network as output signals; The error signals that originate at the output neuron of the network and propagate backward (layer by layer) through the network. The output of the neural network is described by the following equation: M N y F0 w 0 j Fh w ji x i j 0 i 0 (1) where: woj represents the synaptic weights from neuron j in the hidden layer to the single output neuron, xi represents the ith element of the input vector, Fh and F0 are the activation function of the neurons from the hidden layer and output layer, respectively, wji are the connection weights between the neurons of the hidden layer and the inputs. The learning phase of the network proceeds by adaptively adjusting the free parameters of the system based on the mean squared error E, described by equation (2), between predicted and measured path loss for a set of appropriately selected training examples: E 1 m 2 yi d i 2 i 1 (2) where yi is the output value calculated by the network and d i represents the expected output. When the error between network output and the desired output is minimized, the learning process is terminated and the network can be used in a testing phase with test vectors. At this stage, the neural network is described by the optimal weight configuration, which means that theoretically ensures the output error minimization. 3.2 Generalized Radial Basis Function Neural Network (RBF-NN) The Generalized Radial Basis Function Neural Network (RBF-NN) is a neural network architecture that can solve any function approximation problem. The learning process is equivalent to finding a surface in a multidimensional space that provides a best fit to the training data, with the criterion for the “best fit” being measured in some statistical sense. The generalization is equivalent to the use of this multidimensional surface to interpolate the test data. As it can be seen from Figure 3, the Generalized Radial Basis Function Neural Network (RBF–NN) consists of three layers of nodes with entirely different roles: The input layer, where the inputs are applied, The hidden layer, where a nonlinear transformation is applied on the data from the input space to the hidden space; in most applications the hidden space is of high dimensionality. The linear output layer, where the outputs are produced The most popular choice for the function is a multivariate Gaussian function with an appropriate mean and autocovariance matrix. The outputs of the hidden layer units are of the form k x exp x v kx x v 2 T x k 2 (3) vx vy when k are the corresponding clusters for the inputs and k are the corresponding clusters for the outputs obtained by applying a clustering technique of the input/output data that produces K cluster centres [9]. v ky is defined as vky y p cluster k y p (4) Nk is the number of input data in the cluster centre k, and d x, v kx x v kx x v T x k (5) With vkx x p cluster k x p (6) The outputs of the hidden layer nodes are multiplied with appropriate interconnection weights to produce the output of the GRNN. The weight for the hidden node k (i.e., wk) is equal to wk v ky d x, v x K k N k exp 2 2 k 1 2 (7) 4. Models’ Implementation The goal of the prediction is not only to produce small errors for the set of training examples but also to be able to perform well with examples not used in the training process. This generalization property is very important in practical prediction situation where the intention is to use the propagation prediction model to determine the coverage area of potential transmitter locations for which no or limited measured data are available. The selection of the set of training examples is very important in order to achieve good generalization properties [7], [10], [11]. The set of all available data is separated in two disjoint sets that are training set and test set. The test set is not involved in the learning phase of the networks and it is used to evaluate the performance of the neural model. An important problem that occurs during the neural network training is the overadaptation that is the network memorizes the training examples and it does not learn to generalize the new situations. In order to avoid overadaptation and to achieve good generalization performances, the training set is separated in the actual training subset and the validation subset, typically 10-20% of the full training set [7]. In order to make the neural network training process more efficient, the input and desired output values are normalized so that they will have zero mean and unity standard deviation. In order to establish the optimum configuration of the MLP neural network, networks with different architectures and different training algorithms were investigated. The results presented here refer to the optimum MLP-NN for each propagation prediction case. Since the purpose is to train the neural networks to perform well for all the routes, we should build the training set including points from the entire set of measurements data. For training and test purpose we have used the same number of patterns as in the prediction models, for both cases, urban and suburban environment. The inputs of the neural network are as follows: 1. Influence of the transmitter site Position of the transmitter (the transmitter antenna was located always in the same sector, in two different positions), Gain of the transmitter antenna Height of the base station antenna 2. Receiver site The sector where the receiver antenna is located Type of interior (corridor, room) where the receiver is located 3. Distances Distance between transmitter and starting point of measurements Distance covered by the mobile unit; 4. Penetration parameters Number of walls penetrated by the direct ray between transmitter and receiver Number of windows penetrated by the direct ray between transmitter and receiver Accumulated losses of walls and windows penetrated by the direct ray. The input parameters that describe the transmitter and receiver site are quantized so the effect of each parameter is more obvious for the neural network. For example, in order to describe the type of interior where the receiver is located, parameters like size of the corridors are quantized as follows: 1 for the large corridor and 0.3 for the medium corridor. TABLE I MLP - NN RBF - NN µ [dB] 2.77 1.49 σ [dB] 2.31 1.71 RMS [dB] 3.61 2.27 µ [dB] 3.05 3.09 σ [dB] 3.15 2.88 RMS [dB] 4.38 4.23 TRAINING TEST The attenuation factors for different types of walls intervening between transmitter and receiver, as well as the loss for glasses were used as reported in [12] for this particular type of building. All parameters are normalized to the range [-1, +1]. The output layer of the Artificial Neural Network consists of one neuron that provides the received power. A data set of 289 patterns, that represents 20% from all available patterns, was used for training purpose. A set of 1155 patterns was used to test the model. In Table I are represented the absolute mean error, the standard deviation and the root mean square error obtained for the training and the test set, respectively by the proposed Multilayer Perceptron Neural Network (MLP-NN) and the Generalized Regression Neural Network. In Figure 4 is shown a comparison between predicted and measured values of the received power, in case of a particular route: the receiver being located in a different sector (from the transmitter), along the main corridor. An empirical model corresponding to the NLOS situation, when the transmitter and the receiver antenna are on the same floor, is: L L0 10n log d K w Lw where: (8) -84 -88 Received power [dBm] -92 -96 -100 -104 -108 -112 -116 -120 0 2 4 6 8 10 12 14 16 18 20 Covered distance [m ] 22 24 26 28 Measurements 30 32 34 RBF NN 36 MLP Figure 4. Neural Networks prediction and measurements (received power) L = the path loss in dB, L0 = the path loss at 1 meter distance from the transmitter, n = the path loss depending on the environment outside the wall, Kw = number of penetrated walls Lw = the penetration loss due to the wall -62 -66 -70 Path Loss [dB] -74 -78 -82 -86 -90 -94 -98 -102 -106 -110 0 2 4 6 8 Covered distance [m ] 10 12 14 16 18 Measurements 20 22 24 26 RBF NN 28 MLP 30 32 34 36 Empirical Model Figure 5. Predicted and measured values The parameter Lw depends on the type of the wall construction between the transmitter and the receiver and the angle of incidence of the transmitted wave. In the case where more than one wall exists between the transmitter and the receiver, a detailed analysis is required to calculate the total loss (ΣLw). Applying the above-mentioned model to the particular route under investigation, as it can be seen from Figure 5, the prediction made by the neural network model is more accurate, the improvement obtained on the RMS value being 4.37 dB. Making a comparison between the two types of neural networks used to build the propagation prediction models, it is noticed a slight improvement obtained by the Generalized Regression Network over the Multilayer Perceptron model, about 0.15 dB in the RMS sense. 5. Conclusions Propagation measurement results collected in the 1890 MHz band for indoor environment were used to design neural network based models. In order to examine the validity of the neural models, the predicted path loss by them is compared to the measured values and to the path loss obtained by applying an empirical model. The performances of the NN model in indoor environment presented in this work are shown in Table 1. The designed model was trained on data measurements collected in the 1890 MHz band. In contrast to well-known empirical models high accuracy can be obtained, because the NN is trained with measurements inside buildings and thus include realistic propagation effects and also consider parameters, which are difficult to include in analytic equations. It is difficult to make a comparison between the NN based models proposed in this work and the models proposed by the other authors due to differences in building structure. Acknowledgements We would like to thank to all the team that has conducted the measurements and delivered us the measured data in order to investigate the neural networks applicability to the propagation path loss prediction for the environment under discussion. References [1] P. Constantinou, Properties of wireless channels, Wireless LAN systems, Addison Wesley, 1986. [2] G. Wolfle, and F. M. Landstorfer, “A recursive model for the field strength prediction with neural networks”, IEE 10th Conference on Antennas and Propagation (ICAP) 1997, Edingburgh. [3] G. Wolfle, F. M. Landstorfer, R. Gahleitner, and E. Bonek, “Extensions to the field strength prediction technique based on dominant paths between transmitter and recveiver in indoor wireless communications”, EPMCC, September 1997 [4] G. Wolfle, and F. M. Landstorfer, “Prediction of the field strength inside buildings with empirical, neural and ray-optical models”, COST 259, 1999. [5] G. Wolfle, F. M. Landstorfer, “Field strength prediction in indoor environments with neural networks” IEEE 47th Vehicular Technology Conference (VTC), May 1997, Phoenix, Arizona [6] A. Neskovic, N. Neskovic, D. Paunovic, “Indoor electric field level prediction model based on the artificial neural networks”, IEEE Communications Letters, vol. 4, no. 6, June 2000, pp. 190-192 [7] S. Haykin, Neural Networks: A Comprehensive Foundation, IEEE Press, McMillan College Publishing Co., 1994. [8] N. Papadakis, A. G. Kanatas, E. Angelou, N. Moraitis, and P. Constantinou, “Indoor Mobile Radio Channel Measurements and Characterization for DECT Picocells”, Third IEEE Symposium on Computers and Communications, Athens, Greece, 30 June-2 July, ISCC ’98. [9] W. Honcharenko, H. L. Bertoni, J. L. Dailing, J. Qian, and H. D. Yee, “Mechanisms Governing UHF Propagation on Single Floors in Modern Office Buildings”, IEEE Trans. on Vehicular Technology, vol. 43, No. 4, November 1992 [10] C. Christodoulou, and M. Georgiopoulos, Applications of Neural Networks in Electromagnetics, Artech House, 2001 [11] H. Demuth, and M. Beale, Neural Network Toolbox For Use with MATLAB. User’s Guide, Version 3.0 [12] A. Kanatas, N. Moraitis, E. Angelou, and P. Constantinou, “Measurements and Channel Characterization at 1.89 GHz in Modern Office Buildings”, European Transactions on Telecommunications, Vol. 14, pp. 177-192, 2003.