Chapter 5, Control Volume Analysis
advertisement

Chapter 5, Control Volume Analysis
1. Conservation of Mass
i) Continuity Equation
Time rate of change of the mass in a system is zero
Dmsys/Dt = 0
From Reynolds Transport Theorem
B = m = mb
b= 1
Dmsys/Dt = D/Dt ∫ ρdV = ∂/∂t ∫ ρdV + ∫ ρV∙ndA
sys
CV
CS
Continuity
∂/∂t ∫ ρdV + ∫ ρV∙ndA = 0
CV
CS
Steady flow, ∂/∂t = 0
∫ ρV∙ndA = 0
CS
or
Σmout = Σmin
Since m = ρQ = ρVA = ∫ ρV∙ndA
Define average velocity
V = (1/ρA) ∫ ρV∙ndA = m/(ρA)
ii) Fixed, Non-deforming Control Volume
∂/∂t ∫ ρdV + ∫ ρV∙ndA = 0
CV
CS
Ex. 5.1 - 5.5
iii) Moving, Non-deforming Control Volume
Absolute velocity (Fluid velocity seen by an observer in a
V = Wr + VCV
fixed coordinate system):
where Wr is the relative(to the control volume) velocity
VCV is the velocity of the control volume
∂/∂t ∫ ρdV + ∫ ρ Wr ∙ndA = 0
CV
CS
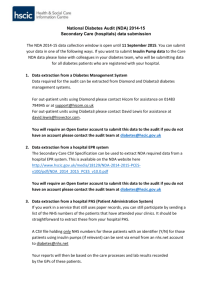
Ex. 5.6
Vplane = Wr1 = -VCV = 971 km/h
V2 = 1050 km/h (from the engine)
Wr2 = V2 - VCV = 1050 - (-971) = 2021 km/h
Steady state, conservation of mass
∫ ρ Wr ∙ndA = 0
CS
ρ2Wr2A2 - ρ1Wr1A1 - m fuel in = 0
Ex 5.7
VCV = -U = -Rω
V2 = Wr2 + VCV
Steady state, conservation of mass
∫ ρ Wr ∙ndA = 0
CS
Σmout - Σmin = 0
2ρWr2A2 - ρQ = 0
Wr2 = Q/(2A2)
iv) Deforming Control Volume
∂/∂t ∫ ρdV + ∫ ρ Wr ∙ndA = 0
CV
∂/∂t ∫ ρdV ≠ 0
CV
CS
V = Wr + VCS
where VCS is the velocity of the control surface seen by a fixed observer
Ex. 5.8 Syringe
∫ ρdV = ρ(ℓA1 + Vneedle)
CV
∂/∂t ∫ ρdV = ρA1(dℓ/dt)
CV
The plunger velocity, Vp = -dℓ/dt
Conservation of mass
∂/∂t ∫ ρdV + mout - min = 0
CV
mout = ρQ2 + ρQleak
min = 0
-ρA1Vp + ρQ2 + ρQleak = 0
Vp = (Q2 + Qleak)/A1
Ex. 5.9 Filling a bath tub
∂/∂t ∫ ρdV + ∫ ρ Wr ∙n dA = 0
CV
CS
C.V. Water in the tub
mout = 0
min = ρ(Vj + dh/dt)Aj
∂/∂t [ρhA] + 0 - ρ(Vj + dh/dt)Aj = 0
ρAdh/dt - ρ Aj dh/dt - ρVj Aj = 0
dh/dt = Vj Aj /(A - Aj ) = Q/(A - Aj )
2. Newton’s Second Law
The linear momentum and moment-of-momentum
i) Linear momentum
ΣFsys = D/Dt ∫ VρdV
ΣFsys = ΣFCV
Reynolds Transport Theorem
D/Dt ∫ VρdV = ∂/∂t ∫ VρdV + ∫ V ρV∙n dA
sys
CV
CS
Linear Momentum Equation
ΣFCV = ∂/∂t ∫ VρdV + ∫ V ρV∙n dA
CV
CS
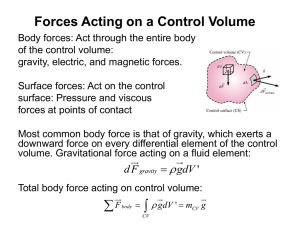
where ΣFCV = ΣFbody + ΣFsurface
ii) Application of the linear momentum equation
a. For inertial (stationary, non-deforming) control volume
Ex. 5-10
ΣFCV = FA - Wn - p1A1 - Ww + p2A2
∂/∂t ∫ VρdV = 0 (Steady state)
CV
∫ V ρV∙n dA = (mV) out - (mV) in
CS
= m(-w2 + w1)
FA - Wn - p1A1 -Ww + p2A2 = m(-w2 + w1)
FA = Wn + p1A1 + Ww - p2A2 - m(-w2 + w1)
Where
m = ρQ = ρw1A1 = ρw2A2
Wn = mg
Ww = ρVg
When FA is positive, force acts upwards in the z-direction.
Important generalities applied to the linear momentum equation
a. One-dimensional (easier to work)
b. Linear momentum is directional
c. Mass flow out is positive, flow in is negative
d. Velocity is according to the direction of the coodinate
e. Steady state
f. Select the C.V. so that the surface is perpendicular to
the fluid
g. Use gage pressure because patm on C.V. cancel each
other
h. External forces have algebraic signs
i. Only external forces acting on the content of C.V. are
considered
For example: C.V. = fluid alone, shear force between
fluid and solid surface is
external force.
C.V. = fluid and surface, shear force is internal only
anchoring force is external
j. Force required to anchoring an object exists in response to surface pressure and/or shear force
acting on C.V.
ii) For an inertial moving, non-deforming control volume
D/Dt ∫ VρdV = ∂/∂t ∫ VρdV + ∫ V ρ Wr ∙ndA
sys
CV
CS
ΣF sys = ΣFCV
Since ΣF sys = D/Dt ∫ VρdV
sys
.
ΣFCV = ∂/∂t ∫ VρdV + ∫ V ρ Wr ∙ndA
CV
CS
Since V = Wr + VCV
ΣFCV = ∂/∂t∫ (Wr+VCV) ρdV + ∫ (Wr +VCV )ρWr ∙ndA
CV
Steady flow
CS
∂/∂t∫ (Wr+VCV) ρdV = 0
CS
VCV = constant
∫ (Wr +VCV )ρWr ∙ndA
CS
= ∫ Wr ρWr ∙ndA + VCV∫ ρWr ∙ndA
CS
CS
∫ ρWr ∙ndA = 0
But
for steady flow
CS
Since
Dmsys/Dt = ∂/∂t ∫ ρdV + ∫ ρWr∙ndA = 0
CV
CS
ΣFCV = ∫ Wr ρWr ∙ndA
CS
Ex. 5-16
C.V. = moving fluid
VCV = Vo
V = W + VCV
∫ Wx ρW∙ndA = -Rx
CS
Ww = ρgA1ℓ
Momentum in the x-direction
∫ Wx ρW∙ndA = -Rx
CS
(mWx)out - (mWx)in = -Rx
m2W2cos45 - m1W1 = -Rx
Momentum in the z-direction
∫ Wz ρW∙ndA = Rz - Ww = m2W2sin45
CS
Assuming frictionless, W1 =W2 = V1 - Vo
m1 = ρW1A1 = ρW2A2 = m2
Rx =m1W1 (1 -cos45) = ρ W12 (1 - cos45)
Rz = ∫ Wz ρW∙ndA + Ww = ρW12A1 sin45 + ρgA1ℓ
CS
The resultant force
R = (Rx2 + Rz2)1/2
Angle of R from x-direction
α = tan -1 ( Rz/ Rx )
iii) Derivation of Moment-of-Momentum Equation
Newton’s second law of motion applied to particle of fluid
D/Dt (VρdV) = δFparticle
The moment-of-momentum
r x D/Dt (VρdV) = r x δFparticle
r is the position vector, Dr/Dt = V,
D/Dt (r x VρdV) = Dr/Dt x V ρdV + D/Dt (Vρ dV)
(Since V x V = 0)
D/Dt (r x VρdV) = r x δFparticle
For a system which is a collection of particles
∫ D/Dt (r x VρdV) = ∫ r x δFparticle = Σ(r x F)
sys
sys
sys
Since Σ(r x F)sys = Σ(r x F)CV
D/Dt ∫ (r x VρdV)
sys
= ∂/∂t ∫ (r x V)ρdV + ∫ (r x V) ρV∙n dA
CV
CS
Σ(r x F)CV = ∂/∂t ∫ (r x V)ρdV + ∫ (r x V) ρV∙n dA
CV
CS
iv) Application of the Moment-of-Momentum Equation
Simplifications:
a. One-dimensional (uniform distribution of average
b. Steady state (steady in the mean for cyclic flows)
c. Work with the component of the torque (along the axis
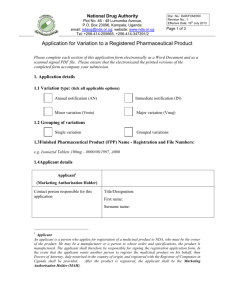
Consider a Rotating Sprinkler
Water exerts a torque on sprinkler
head
for the axial component
Section (1), r x V = 0
Section (2), |r x V| = r2 vθ2
where vθ2 is tangential velocity
observered from a fixed control
volume
V = vθ2, absolute velocity
W2 = (vθ2)r, relative velocity
VC.V. = -r2ω = -U2, velocity of the nozzle (C.V.)
Since
V = W2 + VC.V.
vθ2 = (vθ2)r - r2ω
To find
∫ (r x V) ρV∙n dA
CS
mass flow rate into the C.V.,
mass flow rate out of the C.V.,
right hand rule for r x V
ρV∙n dA is negative
ρV∙n dA is positive
velocity at any section)
of rotation)
r2er x vθ2eθ = -r2vθ2ez
∫ (r x V) ρV∙n dA
CS
= -r2vθ2ez(mout) - 0ez(min)
= -r2vθ2m
The torque about the axis of rotation
Tshaft = Σ(r x F)CV = ∫ (r x V) ρV∙n dA = -r2vθ2m
CS
At a shaft of rotational speed ω, the shaft power
Wshaft = Tshaftω = -r2vθ2mω
Shaft work per unit mass
wshaft = Tshaftω/m = -r2vθ2ω = - U2vθ2
Ex. 5-17 Rotating lawn spinkler
a. Stationary, ω = 0
V2 = vθ2
= Q/2A = 16.7 m/s
Tshaft = -r2vθ2m = -3.34 N-m
b. ω = constant = 500 rpm
= (500 rev/min)(2π rad/rev)/(60 s/min)
= 50 rad/s
V2 = W2 - U2
Tshaft = -r2vθ2m = -r2m(W2 - U2)
W2 = Q/2A = 16.7 m/s
U2 = r2ω = 10.5 m/s
Tshaft = -1.24 N-m
c. If no resisting torque is applied
Tshaft = -r2vθ2m = -r2m(W2 - U2) = 0
W2 - U2 = W2 - r2ω = 0
ω = W2/ r2 = 83.5 rad/s
For a General One-Dimensional Flow Through a Rotating machine
Tshaft = (+m out)(±rvθ)out + (-m in)(±rvθ)in
mass flow out is positive
mass flow in is negative
Wshaft = Tshaftω = (+mout)(±Uvθ)out + (-min)(±Uvθ)in
+ if U and vθ are in same direction
- if U and vθ are in opposite direction
+Wshaft, Tshaft and ω are in same direction, means power
Power per unit mass flow rate
wshaft = Tshaftω/m = (±Uvθ)out - (±Uvθ)in
SUMMARY
into C.V. (Ex. Pump)
A. Radial flow rotating machinery
Conservation of mass, m = ρVR1A1 = ρVR2A2
VR1 = Q/A1
VR2 = Q/A2
C.V. velocity, U1 = r1ω
U2 = r2ω
Velocity Triangle
V1 = W1 + U1
V1 = VR1 + Vθ1
W1 = WR1 + Wθ1
VR1 = WR1
similarly
V2 = W2 + U2
V2 = VR2 + Vθ2
W2 = WR2 + Wθ2
VR2 = WR2
Moment-of-momentum
Tshaft = (+m out)(±rvθ)out + (-m in)(±rvθ)in
Wshaft = Tshaftω = (+mout)(±Uvθ)out + (-min)(±Uvθ)in
wshaft = Tshaftω/m = (±Uvθ)out - (±Uvθ)in
+ if U and vθ are in same direction
- if U and vθ are in opposite direction
Ex. 5-18
Conservation of mass, m = ρ VR1A1 = ρ VR2A2
At inlet,
Vθ1 = 0
V1 = VR1 + Vθ1
V1 = VR1
V1 = W1 + U1
U1 = r1ω
W1 = WR1 + Wθ1
Since , V1 = VR1 = WR1
Wθ1 = -U1 = -r1ω
At exit
V2 = W2 + U2
V2 = VR2 + Vθ2
Since, VR2 = WR2
U2 = r2ω
From velocity triangle
Vθ2 = U2 - W2cosθ
VR2 = W2sinθ
W2 = VR2 / sinθ
m2 = ρQ = 2πr2 hρVR2
VR2 = m2 /(2πr2 hρ)
Wshaft = (+mout)(±Uvθ)out + (-min)(±Uvθ)in
= m2(±U2 Vθ2)
B. Axial flow rotating machinery
Conservation of mass, m = ρ Vx1A1 = ρ Vx2A2
Since A1 = A2 = 2πrm(ro - ri)
rm = (ri + ro)/2
U1 = U2 = rmω
Vx,1 = Vx,2
(for incompressible flow)
Velocity Triangle
V1 = W1 + U1
V1 = Vx1 + Vθ1
W1 = Wx1 + Wθ1
Vx1 = Wx1
similarly
V2 = W2 + U2
V2 = Vx2 + Vθ2
W2 = Wx2 + Wθ2
Vx2 = Wx2
Moment-of-momentum
Tshaft = (+m out)(±rvθ)out + (-m in)(±rvθ)in
Wshaft = Tshaftω = (+mout)(±Uvθ)out + (-min)(±Uvθ)in
wshaft = Tshaftω/m = (±Uvθ)out - (±Uvθ)in
+ if U and vθ are in same direction
- if U and vθ are in opposite direction
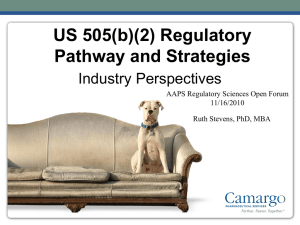
Ex. Problem 5-77
Axial flow water turbine
rm = 6 in
ω = 1000 rpm
Stator blabe exit angle = 70
Rotor blabe inlet angle = 45
rotor blade exit angle = 45
Find: wshaft
Consevation of mass, m = ρ Vx1A1 = ρ Vx2A2
Vx1= Vx2
C.V. Velocity
U1 = U2 = rmω
=[(6/12)(1000)(2π)/60]
= 53.2 ft/s
Velocity triangle
V1sin70 = Vθ1
(1)
V1cos70 = Vx1
W1sin45 = Vθ1 - U
(2)
(3)
W1cos45 = Vx1
(3)/(4)
(4)
tan 45 = [Vθ1 - U]/Vx1
= [V1sin70 - U]/[V1cos70]
V1 =U/[sin70 - cos70tan45]
= 86.7 ft/s
Vθ1 = V1 sin70 = 82.3 ft/s
Vx1 = V1 cos70 = 29.9 ft/s
W1 = Vx1/cos45 = 242.4 ft/s
Similarly
W2cos45 = Vx2
(5)
Vθ2 = U2 - W2 sin45 (6)
V2sinα2 = Vθ2
(7)
V2cosα2 = Vx2
(8)
From conservation of mass
Vx1 = Vx2 = 29.9 ft/s
W2 = Vx2/cos45 = 42.4 ft/s
Vθ2 = U2 - W2 sin45 = 22.4 ft/s
(7)/(8)
α2 = tan -1(Vθ2/Vx2) = 37o
V2 = Vθ2/sinα2 = 37.2 ft/s
wshaft = Tshaftω/m = (±Uvθ)out - (±Uvθ)in
= (±U2mvθ,2)out - (±U1mvθ,1)in
= -3130 ft-lb/slug
3. First Law of Thermodynamics
- The Energy Equation
i) Derivation of Energy Equation
D/Dt ∫ eρdV = [(Qnet)in + (Wnet)in]
sys
sys
Total stored energy
= internal energy + kinetic energy + potential energy
or,
e= u + V2/2 + gz
take the control volume that is coinside with the system
[(Qnet)in + (Wnet)in] sys= [(Qnet)in + (Wnet)in]C.V.
Reynolds Transport Theorem
B = me
b=e
(Qnet)in , rate of heat transfer into the C.V. by conduction, convection and/or radiation,
(Qnet)in = 0, for an adiabatic process
(Wnet)in, power into the C.V.
(Wnet)in = Wshaft + Wnormal stress + Wtangential stress
Wshaft = Tshaft ω
Wnormal stress = ∫ σ V∙n dA = ∫ -p V∙n dA
= ∫ (-p/ρ)ρV∙n dA
Since the normal stress,
σ = -p
Wtangential stress = ∫ τ V∙n dA = 0
Since tangential stess, τ, is between the fluid and the
=0
∂/∂t ∫ eρdV + ∫ eρV∙n dA
CV
CS
=[(Qnet)in + (Wshaft net)in]C.V. + ∫ (-p/ρ)ρV∙n dA
CS
∂/∂t ∫ eρdV + ∫ (u + p/ρ + V2/2 + gz)ρV∙n dA
CV
CS
= [(Qnet)in + (Wshaft net)in]C.V.
ii) Application
Steady flow
∂/∂t = 0,
ehthalpy,
h = u + p/ρ
min = mout = m
m[(hout - hin) + (Vout2 - Vin2)/2 + g(zout - zin)]
= [(Qnet)in + (Wshaft net)in]C.V.
Ex. 5-20
iii) Comparison of Energy Equation with Bernoulli Equation
One-dimensional, incompressible, steady flow
m[(uout - uin) + (pout - pin)/ρ + (Vout2 - Vin2)/2 + g(zout - zin)]
solid surface where V
= [(Qnet)in + (Wshaft net)in]C.V.
Without shaft work, (wshaft net)in = 0
pout/ρ + Vout2/2 + gzout = pin/ρ + Vin2/2 + gzin
- [(uout - uin) - (qnet)in]C.V.
Bernoulli equation along a streamline
pout/ρ + Vout2 /2 + gzout = pin/ρ + Vin2/2 + gzin
Define:
Loss = (uout - uin) - (qnet)in
For flow in pipes, modified Bernoulli equation
pout/ρ + Vout2/2 + gzout = pin/ρ + Vin2/2 + gzin - Loss
Ex. 5.23
Consider friction and shaft work
pout/ρ + Vout2/2 + gzout
= pin/ρ + Vin2/2 + gzin + (wshaft net)in - Loss
Stagnation pressure, po = p + ρV2/2
(pout + ρVout2 /2)/ρ+ gzout
= (pin + ρVin2/2)/ρ + gzin + (wshaft net)in - Loss
or,
(po)out/ρ+ gzout
= (po)in/ρ + gzin + (wshaft net)in - Loss
Mechanical Efficiency:
For fan , blower, or pump
(po)out/ρ+ gzout
= (po)in/ρ + gzin + (wshaft net)in - Loss
ηFan = [(wshaft net)in - Loss]/(wshaft net)in
= {[(po)out - (po)in]/ρ+ g[zout - zin]}/(wshaft net)in
For turbine
pout/ρ + Vout2/2 + gzout + (wshaft net)out
= pin/ρ + Vin2/2 + gzin - Loss
ηturbine = (wshaft net)out/[ (wshaft net)out + Loss]
= (wshaft net)out/{[(po)in - (po)out]/ρ+ g[zin - zout]}