International Review of Electrical Engineering (I.R.E.E.), Vol. xx, n. x
Advanced Industrial Crane Controller Based on AC Wound Motor
F. Kolonić, A. Poljugan, A. Slutej
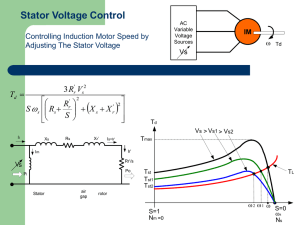
Abstract –Developed speed crane control system which is based on a wound AC motor is an
advanced system for heavy duty tasks especially in the field of industrial cranes and other heavy
duty material handling systems. In order to avoid problems with a mechanical feedback device
(coupling, vibration, no space for build in, etc.), actual speed information is calculated from a
rotor voltage frequency estimation unit. The controller is developed as a modular system capable
to deal with control, communication, protection and other specific industrial demands. It is a
multiprocessor system in stand-alone version realized with microcontroller MC68332 (application
program running), two SAB 82532 microcontrollers (distributing control system), two MC68302
(process I/O communication) and two DSP ADMC300 (speed and electromagnetic torque
estimation). Speed and torque estimation algorithms are realized on the separate hardware
modules and integrated with other components in the control system via fast communication link.
Investigation of sensorless speed and torque control as well as fully automatic control of the rotor
resistor switching, was the crucial point in the design process of a new industrial drive controller
aimed mostly for the revitalization of industrial cranes. Performance of the speed and torque
sensorless crane controller is evaluated on the laboratory testbed and in different real industrial
environment.
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved.
Keywords: crane control, revitalization, rotor frequency measurement, speed estimation, torque
estimation, wound AC motor.
kR
Nomenclature
E2(U ,V ,W )
- non-filtered (measured) rotor voltage of
E2 filt
the U, V, W phase
- filtered rotor voltage
f ALL _ PHASE - estimated rotor voltage frequency in the
fs
f1
f2
f 2(U ,V ,W )
low frequency operating regime
- cut-off frequency of the rotor voltage LP
filter
- rotor frequency estimation error
- estimated rotor voltage frequency mean
value in high frequency operating regime
- sampling frequency of a speed estimation
- stator frequency
- rotor frequency (measured, estimated)
- frequencies of the rotor voltages U,V,W
id
I lim
- current disturbance signal
- stator current limit
is
is ( a ,b , c )
- stator current vector
- stator current components in abc
is ( , )
stationary frame
- α, β components of the stator current
fc
ferr
f MEAN
Manuscript received January 2007, revised January 2007
K0 ,.., K3
nlev
n filt
ns
n, n2
p
Rc
RiC , RiW
Rm
- percent change in resistor value caused by
temperature
- rotor contactors
- speed level for frequency measurement
method switchover
- calculated rotor speed of the last sampling
- synchronous mechanical rotor speed
- rotor mechanical speed
- number of pole pairs
- cable resistance, from rotor to ext. resistor
- ith external rotor resistor value in cold and
warm case
- rotor phase resistance
- stator phase resistance
- external rotor resistors
- equivalent motor unity resistance
R100
- motor slip
s
- rated (nominal) slip
sn
sign( sl ) - sign of the motor slip (oversynchronous “-“
sign(tq) - sign of the motor torque
siCM , siWM - maximal slip for ith external rotor resistor for
cold and warm case
- possible motor torques in cold and warm
Tic , Tiw
case
Rs
R1 ,.., R5
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights
reserved
F. Kolonić, A. Poljugan, A. Slutej
TIME _ U (V ,W ) - the number of pulses between two
consecutive zero voltage crossing of
the rotor phase U,V,W
- maximal motor torque for ith external
TM
resistor
- voltage disturbance signal
ud
us
us ( a ,b , c )
- stator voltage vector
- stator voltage components in a,b,c
u s ( , )
frame
- α, β components of stator voltage
s
s ( , )
- stator flux vector
- α, β components of stator flux
I.
Introduction
In the last fifty-sixty years AC wound motors have
been widely used in many industrial tasks, such as
material handling systems, pipe and paper mills, steel
and rolling mills, container loading/unloading cranes,
power plants, engineering workshops, etc. In the
beginning, the control of these drives was mainly
focused on the rotor motor side using speed based rotor
contactor switching for discontinuous additional
external rotor resistor change. Thanks to that, it was
surely the unique electrical AC machine at this time,
capable to start with maximal available torque and at the
same time drawing the minimal stator current from the
mains. At that time it was a very pragmatic solution to
use AC wound motors for those tasks, because of its
high robustness and very simple and effective
speed/torque control from the rotor side. Emerging
power electronic switches, especially thyristors, with an
additional AC/AC converter in the stator side, AC
wound motors have got a new perspective in the control
domain. Since the basic phase thyristor control from
stator side is not satisfactory (limiting control region
app. 10 to 30% around the nominal speed), the resistor
control from the rotor side was added which resulted in
outstanding features. With appropriate external rotor
resistors switching and phase control of the stator
voltage, all working points within the nominal speed and
torque of four quadrant (4q) operation can be reached.
The history of such controller type started in 1970's,
when the Swedish company ASEA developed analogue
ASTAT controller specially intended for the material
handling crane purposes, [1]. It was designed for heavy
duty installations with static components which required
less space than a comparable relay based systems for the
same purposes and with tachogenerator connection for
the speed control loop. The voltage and current ratings
were 3x220-3x500V and 18A-1700A. All the control
electronics were in modular exchangeable circuit boards
and the system was proven in more than 6.000
installations.
Controller had all needed function for the crane
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
applications but suffered in the lack of flexibility
(controller’s parameter change), pure communication
and monitoring capabilities, and from time to time had
problems with components sensitivity due to the hard
environmental conditions (temperature, dust, humidity).
Afterwards, Siemens designed the SIMOTRAS HD
crane controller with voltage and current ratings from
3x220-3x500V and 60A-900A, [2]. It was characterized
with identical functions as ASTAT®, but built in a new
technology, on the same platform as SIMOVERT
Masterdrives and SIMOREG DC MASTER for DC
drives. It uses tachogenerator and pulse encoder as
speed feedback devices. The communication with the
controller is realized via PROFIBUS-DP and as a user
interface it’s possible to use operational panel OP1S or
PC-program SIMOVIS. Comparing to the old analogue
ASTAT® version, the advantage is more flexibility, in
user interface and in communication capabilities with
other devices in complex automation process.
The age of digital technique gives completely new
dimensions in the crane control possibilities. Request
from unavoidable industrial automation in the complex
industrial systems resulted in the use of smart
components for every specific function in the frame of
complex industrial task. Considering the crane control
issues, the requests are very large. With the new
technical age, the crane controller has to be seen as an
open control system from outside. Recognizing that,
some OEMs (Original Equipment Manufacturers)
developed new generation of crane controllers based on
the wide spread AC wound motors, intended not only
for the new drives, but for a revitalization of the old
drives too.
The Purpose of revitalization is not only to extend
the lifetime of electrical equipment, but also to include
such control systems with new equipment on the global
trend towards information systems which see cranes as
crucial components in different industrial applications,
e.g.
material
handling
systems,
container
loading/uploading etc.
The crane’s logistic information system is more
and more used for production cranes. The overriding
level has to know precisely where materials (or cranes)
are located and has to perform all operations quickly,
consistently and reliably, [3],[4]. It is used for
production orders, crane condition monitoring as well as
for the set-up of crane motion controllers. The requests
on the new advanced crane controller (revitalized or
new) to communicate with an existing or new plant
management system must be fulfilled.
The Swedish company ABB together with the Faculty
of Electrical Engineering and Computing, University of
Zagreb (Croatia) has developed the first version of the
new digital ASTAT® crane controller in the beginning
of 2000, [5]. The first installed digital ASTAT®
controller was in EOT (Electric Overhead Travelling)
hoist crane in Husum paper mill (Sweden) in 2000.
Today, the improved version of this controller type is
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
the most advanced controller in the field of crane control
with AC wound motor, where the speed and torque
control can be performed without mechanical sensors.
Some industrial applications, which are supported by
this controller, show diversity of functions. For example,
16t and 170t hoist cranes in nuclear plant Forshmark
(Sweden); 5 winch coordinated drive for power fleet
mining mooring system with 80kw motors (Bangka,
Indonesia); electrical shaft in steel factory Avesta
(Sweden); 2 EOT ladle cranes; 3 planetary gearbox
drive for 450t/80t (1.4MW) ladle hoist in BaoSteel,
Baoshan steel making plant (China), etc. Some of these
applications use estimated speed and/or torque feedback
for the main control tasks.
II.
Control System Description
The structure of the developed controller is
presented in Fig. 1. Application program is running on
the Main control board in Control module, built up
around the Motorola MC68332 microcontroller unit and
supported by a local operating system. The Main control
board exchanges data with process by Process units (one
unit is in Main control board, two process units are
Cabin unit No.1 and No.2.). It is possible to connect up
to 16 process I/O (Input/Output) units to the Main
control board, [3], [4], [6].
The frequency of the rotor voltage (needed for speed
estimation and presented in Control module as Rotor
frequency estimation unit, Fig.1.) is determined by
advanced digital filtering. Electromagnetic torque
estimation is realized in Torque estimation unit in the
same Control module.
Estimated torque is used as actual torque for the torque
control loop. For actual speed detection in
oversynchronous regenerative mode of operation when
speed sensorless control is used (no mechanical speed
feedback), the sign of torque is used for accurate
oversynchronous speed determination. In order to find
optimal rotor resistor for each working point, automatic
on-line rotor resistor optimization requires actual torque
calculation too. This optimal resistor switching logic
will be explained in details in chapter V.
By means of a thyristors pairs in each phase, stator
voltage is continuously controlled with AC/AC phase
controlled thyristor converter, Fig.2, [7]-[9]. The Main
control board sends the firing pulses to the Firing unit in
Thyristor module. Using five thyristor pairs (three pairs
in each phase and two pairs for reversing), four quadrant
operation is realized, Fig.2.
Forward torque direction is defined by thyristor pairs 1,
2 and 3 (forward bridge) and reverse torque direction by
1, 4 and 5 thyristor pairs (reverse bridge). In the hoist
type of motion, when the drive is lowering the load,
motor may regenerate energy back to the line in the most
robust manner. Due to the safety reasons, the rotor
resistor is minimized in this control region, ensuring
regenerative mode with slightly higher motor speed than
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
synchronous and the special open loop control routine is
then activated bypassing outer speed control loop, [9].
Power supply
Signalization
Fault tracing
Cabin unit
No.1.
Communication to
high auttomation
level
Signalization
Fault tracing
Cabin unit
No.2.
Thyristor
module
Control module
Main control board
PC
Servis terminal,
Service Tool,
Developing
system
Process
unit
Rotor
frequency
estimation
unit
Firing unit
with current
feedback
Rotor
adaptation
unit
Wound
motor
Brake
Torque
estimation
unit
External
rotor
resistors
Rotor contactors
Fig.1. The block structure of industrial crane controller
The Main control board communicates with all other
units in the drive controller and includes all usual
function for crane control such as joystick handling,
limit switch logic with slow down and stop, automatic
brake application approaching zero speed, automatic
rotor contactor switching logic, etc.
All control system connections to high automation
level (Master/Follower, Motion control, Overriding
control communication), and Process control (including
cabin I/O communication) are made by optical fiber.
The communication is realized by two communication
microcontrollers SAB82532. Details can be found in
[3]-[6].
speed
L3
L2
3
4
L1
2
Tyristors
1, 2 i 3
1
5
torque
M
Tyristors
1, 4 i 5
a)
b)
Fig.2. Four quadrant AC/AC thyristor converter a) and torque vs.
speed drive characteristics b).
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
With such controller design applied for
revitalization, all requirements are fulfilled for the
integration of these drives in the CDA (Complex
Distributed Application), based on the crane control
network facilities, [10].
The general description of the speed control system is
presented in Fig.3. The inner current control loop is
subordinated to the outer speed or torque control loop,
selected via parameter. Controllers are generally PID
type, with parameters and structure dependent on the
specific industrial applications. Usually, reference value
can be sent from master or cabin I/O units using
joystick, or from overridden system via communication
link. Optionally, speed feedback can be pulse encoder
(E), tachogenerator (TG) or estimated speed (soft speed
sensor). Considering nonlinear relationship between
motor torque and current, nonlinear compensation block
is added.
torque
estimation
torque
controller
torque/speed
control
nref
+
+
n
Speed (torque)
reference
handling
-
PID
torque direction
logic selector
torque/speed
control
+
PID
speed
nonlinear
controller compensation
is
-
PID
arcos
AC/AC
converter
current
controller
AM
u
TG
E
R
stator current
scaling
rotor resistor
selection logic
speed feedback
scaling
speed feedback
select
speed
estimation
Fig.3. Simplified control block structure of industrial crane controller based on the wound AC motor
The automatic on-line rotor resistor optimization
algorithm, i.e. rotor resistor switching (selection) logic,
insures minimal stator current taking into consideration
the momentary line voltage and required torque. Plug
braking and oversynchronous regenerative braking in
hoisting mode is possible.
In short, this controller is like a modern car; the
control system insures cruise control (stator voltage
control) and automatic gearbox (optimization of rotor
characteristics).
Speed and torque estimation logic as a separate plugin unit (according to modular design strategy).
The speed and torque estimator are developed using a
DSP based microprocessor boards in order to fulfill
signal processing requirements, Fig.4. These boards are
integrated in the modular structure of the industrial
control system via I/O unit using high speed serial link
RS422 (speed 1-4Mbs).
III. Basic concept of a speed estimation
In order to avoid mechanical speed sensor or/and
ensure a speed measurement devices redundancy when
mechanical speed sensor exists, the speed estimation
system was developed.
Before speed estimation process analysis it has to be
emphasized that design process is based on a strictly
defined industrial sponsor’s requests frame. This frame
summarizes the following issues:
AC wound motor as the actuator for the crane drive
applications,
Realization of the stator voltage control by means of
AC/AC 4q thyristor phase converter,
Optimization of the speed-torque characteristics by
means of the external rotor resistors change,
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
Fig.4. The speed and torque estimator boards (hardware realization);
speed estimator (upper board), torque estimator (bottom
board)
Considering the speed estimation, the conventional
techniques used for the vector controlled squirrel cage
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
induction machine (Field Oriented Control, FOC) can
not be used in this application. That is why different
solutions for the speed estimation considering the above
defined sponsor's requests frame were needed. Since a
wound motor is used, rotor voltage can easily be
measured on the rotor rings, [11]. The idea for the speed
estimation can therefore be described with the simple
well known relations,
f 2 s f1 ;
n (1 s) n s
between 0-120 Hz. That is the reason why the adaptive
filter was designed. The filter selects appropriate cut-off
frequency, based on the speed estimator output value,
Fig.5.
1
1 sT
E2
1
1 sT
1
1 sT
E2filt
fc
(1)
low_freq
III.1. Rotor voltage frequency measurement
Because the large amount of higher harmonics
produced by stator phase controlled AC/AC converter is
transformed on the rotor, low pass rotor voltage filtering
must be applied to the rotor voltage frequency
estimation. This is connected to the desirable frequency
(speed) estimation accuracy. Rotor frequency is
determined by measuring the time period between two
consecutive zero passing of the filtered rotor voltage
waveform. For specific drive operating conditions (e.g.
reversing from over synchronous regenerative speed),
the frequency of the rotor voltage may be approximately
|nfilt|
<
fc/2
fc
nlev
Fig.5. Block structure of the realized variable rotor voltage filtering
The presented filter is variable in the sense of cut-off
frequency change, but the filter structure, type and order
remains unchanged. The base structure of the variable
filter is the cascade of the three 1st order low pass (LP)
filters. The main criterion for the selection of an
appropriate cut-off frequency fc is the calculated rotor
speed of the last sample nfilt, Fig.5, and Fig.6., [9].
Rotor frequency measurement in the HIGH frequency operating regime
|nfilt|
relay
E2U
time
positive
derivation measurement
LP filter
f2U
T
|nfilt|
nlev
|nfilt|
relay
E2V
positive
time
derivation measurement
LP filter
f2V
T
|nfilt|
E2W
relay
MEAN
VALUE
fMEAN
>
fALL_PHASE
fMEAN
low_freq
f2
positive
time
derivation measurement
LP filter
f2W
T
Rotor frequency measurement in the LOW frequency operating regime
time
positive/negative
measurement
derivation
fALL_PHASE
OR
T
Fig.6. Simplified block diagram of the frequency (speed) estimation algorithm
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
International Review of Electrical Engineering, Vol. xx,
n. x
International Review of Electrical Engineering (I.R.E.E.), Vol. xx, n. x
25
E2-filt [V]
E2 [V]
20
15
f2=3,5 Hz
10
5
t[s]
0
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
-5
-10
-15
-20
-25
a)
200
E2 [V]
E2-filt [V]
150
100
50
t[s]
0
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
-50
The sampling frequency of the rotor and stator
frequencies measurement unit is 10 kHz, so the
estimation error with cycle ΔT=0.1ms is
T
f err (%)
100 T f 100 0.01 f . (3)
T
The error is directly proportional to the frequency, e.g. if
the estimated frequency is 100Hz, error is 1%.
For the low rotor voltage frequencies (less than 25
Hz), time between two consecutive zero passes (positive
and negative) of any rotor voltage (U, V or W) is
measured and estimated frequency fALL_PHASE is derived.
This modification provides six times faster refreshment
of the frequency (speed) estimated value, which is
important for the stability of the speed control loop. For
example, if the rotor voltage frequency is 5 Hz, then
refreshment time (time needed to establish new
estimated value) will change from 200 ms to 200/6=
33,3 ms. The illustration of the rotor voltage frequency
measurement modification is shown in Fig.8.
f2=41 Hz
E2 [V]
Manuscript received January 2007, revised January 2007
100
0
-100
T/6
-200
Based on the comparison between the estimated speed
absolute value and predefined value, the selection
between the two filter cut-off frequencies is provided by
signal selector low_freq, Fig.5. There is a possibility of
a more cut-off frequency values selection, but applied
testing shows that the increasing number doesn’t
improve considerably estimation performance, [12].
Results of filtering for the rotor voltage frequencies 3,5
Hz and 41 Hz is shown in Fig.7.
If the drive operating points result in the rotor voltage
frequencies lower than a predefined limit (signal nlev,
Fig. 6.), another frequency estimation algorithm will be
activated. It is achieved by the same low_freq selector,
in the block Rotor frequency measurement in the LOW
frequency operating regime, see Fig. 6. In this algorithm
rotor frequency measurement is based on the time
distance between two consecutive zero voltage crossing
of all three rotor phases (signal fALL_PHASE). For the high
rotor voltage frequencies region (e.g. over 25 Hz, close
to the rated condition) frequencies for each rotor phase
f2U, f2V and f2W are calculated from non-filtered rotor
phases E2U, E2V, E2W, and the mean value estimated
frequency fMEAN is derived.
The zero rotor voltage passing is determined by a
positive derivation block which produces impulses for
time counter, Fig.6. Then the frequency of the rotor
voltage is calculated according to the equation
3 fs
.
(2)
f2
TIME _ U TIME _ V TIME _ W
-300
b)
Fig.7. Original and filtered rotor voltage waveform with frequency
20Hz a) and 41HZ b).
-400
-200
200
300
-150
400
-100
T/2
0
0.002
0.004
0.006 0.008
t [s]
0.01
0.012
0.014
0.014
0.018
0.02
Fig. 8. Illustration of the rotor voltage frequency measurement
modification
Based on the Fig.6, the frequency estimation
algorithm is experimentally verified on the speed control
system, Fig. 9, where the speed reference is changed
from +nmax to -nmax. The frequency change is close to
100 Hz (maximal slip is s2). One can notice that the
rotor voltage frequencies before and after speed
reversing are practically the same, but the speed values
have different sign. This indicates that for speed
determination some drive condition signals have to be
used in order to establish exact speed values. Block
diagram of the rotor voltage frequency estimation
realized with digital signal processor ADMC 300 is
presented in the Fig.10.
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights
reserved
F. Kolonić, A. Poljugan, A. Slutej
120
f2 [Hz]
III.2. Rotor speed measurement
100
80
It is simple to calculate the estimated speed from the
estimated frequency (2) by knowing the right position of
motor operating point inside 4q operation region of
speed/torque characteristics. Actual motor speed is
calculated using equation
sign(tq) 60 f1 signsl f 2
.
(4)
n
p
Characteristics of the speed estimator for 10% and
100% square wave speed reference in both directions
are presented in Fig.11. and Fig.12. The comparison
between speed signal from tachogenerator (TG)
feedback device and estimated speed from the rotor
voltage frequency measurement has been experimentally
performed. The experiment is based on the control
scheme in Fig.3, where the speed control loop is closed
with the mechanical feedback sensor (TG). As it can be
seen from experiments in Fig.11. and Fig.12, the speed
estimation error in steady state is smaller when the speed
reference is set as +100% (-100%) than +10% (-10%).
Speed error is larger in transient state in both cases; it is
due to the inherently slow process of the frequency
estimation which increases refreshment time of the new
estimated frequency value.
60
40
20
t [s]
0
0.03
1.63
3.22
4.81
6.41
Fig.9. Estimated rotor voltage frequency under full speed reversing
(from +n_max to –n_max)
It is possible to estimate frequency and speed for 4
motors at the same time. After the first stage of analogue
signal processing and A/D conversion in the second
stage, digital filtering of rotor voltages is performing in
the third stage. After that, information is sent to the
Process I/O unit via fast serial RS422 link, see Fig.1.
motor 1.
ANALOGUE
SIGNAL
PROCESSING
(rotor voltages
adoption unit)
motor 2.
motor 3.
DIGITAL
FILTERING
A/D
conversion
motor 4.
ROTOR
VOLTAGES
comm.
link to
control
process
board
Fig.10. Block diagram of the rotor voltage frequency and speed
estimation realized with digital signal processor
SPEED ERROR [rpm]
SPEED [rpm]
(2)
(1)
time [s]
time [s]
a)
b)
Fig.11. Estimated (1) and measured (2) speed a), estimated speed error b) for 10% speed reference (150 rpm)
SPEED [rpm]
SPEED ERROR Speed
[rpm] error (w RFM -w TACHO)
Speed(RFM and TACHO)
80
1500
60
40
speed(r/min)
speed(r/min)
1000
500
0
-500
(1)
-1000
20
0
-20
-40
-60
(2)
-1500
-80
0.1
2.9
5.8
8.6
11.5
14.3
time [s] time(s)
c)
17.2
0.1
2.9
5.8
8.6
11.5
14.3
17.2
time
[s]
time(s)
d)
Fig.12. Estimated (1) and measured (2) speed a), estimated speed error b) for 100% speed reference (1500 rpm)
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
The speed estimation equation (4) is valid as long as
the rotor voltage frequency is properly estimated. There
are three basic (specific) operation states where 4q
speed control system, based on the estimated speed,
doesn't work properly. Those are: AC/AC converter
dead time (switch-over state), operation region with
small load and operation region with small slip (close to
synchronous).
For the purpose of accurate speed estimation in the all
operating regimes, the speed estimation freezing logic
(SEFL) is designed, Fig.13. It should be emphasized that
the proposed logic can eliminate all influences caused
by specific operation states on the estimated speed
accuracy. The estimator output nest is frozen every time
when the new speed estimated value is physically
unacceptable. Physical acceptability means that the
difference between two consecutive samples of the
estimated speed cannot be significantly large (a few
percent of the estimator output value).
speed reference change, as opposed to SEFL (green
line), which works correctly.
dE2/dt>0
n_ref [rpm]
1200
1000
800
600
400
200
t [s]
0
-200
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
6,5
7
7,5
8
8,5
-400
-600
-800
-1000
-1200
-1400
-1600
Fig.14. Comparison between
a) estimated
reverziranje speed with (green) and
without (red) use of the output freezing logic in the case of speed
1600
n_est_nofreeze
n_ref
[rpm]
n_taho [rpm]
n_est_noFIFO
[rpm] rpm)
n_est [rpm]
reference
change
(from
1500 rpm
to -1500
1400
1200
n_taho [rpm]
n_est_noFIFO [rpm]
n_est [rpm]
n_ref [rpm]
Unloading the machine from ~50 % of Tn to zero, leads
1400
to
a similar problem, Fig.15. Because of the speed
1200
1000
increase,
control system requests reverse torque in order
to800
equalize
reference and actual speed value. After the
600
t [s]
control
system processing time, which includes
400
200
converter's
dead time, reverse bridge is turning on and
t [s]
0
speed
starts.
problem
of 8 rotor
0,5
1 control
1,5
2
2,5
3
3,5 Due
4
4,5to 5 the
5,5
6
6,5
7
7,5
8,5
-200
-400
frequency
estimation during converter's switching dead
-600
time,
speed
estimator gives incorrect value on the output
-800
in
the
first
moment
after dead time elapse, see Fig.15.b).
-1000
b) rastrećenje
-1200
However, owing to the proposed freezing logic (SEFL),
-1400
accurate estimated speed value is attained.
-1600
1600
1000
800
rasterećenje
(s ~50% Mn na 0)
400
OR
n_est [rpm]
1400
600
tfreeze>tmaks
n_est_nofreeze
n_est_noFIFO [rpm]
n_taho [rpm]
1600
200
0
AND
abs
freeze
-200
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
6,5
7
-400
-600
a>b
-800
+
-
X
-1000
-1200
0.05
nest
new estimated value
old estimated value
(estimator output)
output
freezing
-1400
a) reverziranje
1600
Fig.13. Simplified block diagram of the speed estimation freezing
logic (SEFL)
n_ref [rpm]
n_est_nofreeze
[rpm]
n_est_noFIFO [rpm]
n_taho [rpm]
n_est [rpm]
1400
1200
1000
If acceptability condition is not fulfilled, the new
estimated value is rejected and the estimator sets the old
estimated value on its output (frozen state). However,
for the safety reason, estimator output unfreezes when
the maximal allowed freezing time is exceeded and/or
the rotor voltage amplitude increment is detected. The
rotor voltage amplitude increment implicates the
machine torque increment and, as a consequence, the
operating point changes. The comparison between the
estimated speed with and without SEFL in the case of
speed reference change from 1500 rpm to -1500 rpm is
presented in the Fig.14. When the speed reference
command for opposite direction is set (t=3.3sec, see
Fig.14.), subordinated current controller requests
negative torque, i.e. switching from forward to reverse
thyristor bridge in AC/AC converter, see Fig.2. This
logic, very similar to AC/DC dual converters for DC
drive, leads to unavoidable converter’s safety dead time
(10ms), which results in a rotor voltage frequency
estimation error and consequently speed error too. One
can see from the Fig.14 that the estimated speed (red
line) has a large dynamic error in the moment of the
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
800
600
unloading
rasterećenje
~50% Mto
0) M )
n na
(from(s~50%
0%
n
400
200
t [s]
0
-200
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
6
6,5
-400
-600
-800
-1000
-1200
-1400
a)
b) rastrećenje
b)
Fig.15. Comparison between estimated speed with (green)
and speed without (red) SEFL in the case of the machine unloading
a); enlarged part b).
International Review of Electrical Engineering, Vol. xx,
n. x
7
F. Kolonić, A. Poljugan, A. Slutej
IV. Basic concept of a torque estimation
In order to fulfill the control system application
requirements as well as to achieve system
competitiveness a torque control loop was added, Fig.3.
The estimated torque is important variable for the speed
estimation and for the automatic on-line rotor resistor
optimization.
The use of conventional methods for measuring
torque on the shaft coupling a motor to a load by means
of strain gauges yields to the accurate values for a
constant or slowly varying torque. Furthermore a
mechanical sensor must be selected according to the
motor's speed and size. This can be difficult and
expensive if you work with a variety of motors at the site
testing, where installation and mounting of mechanical
sensors could be very costly and time consuming. Also,
sometimes the site is difficult or dangerous to access and
it may not be practical to install a mechanical measuring
sensor for torque as well as for speed measurement.
The described solution of dynamic torque
measurement does not need any mechanical elements.
The algorithm of the electromagnetic torque estimation
is based on the estimation of the stator flux in the
stationary reference frame (- frame). The
instantaneous values of the stator voltages and currents
are measured and the stator flux is calculated using
voltage equation
u s Rs i s
d s
.
dt
(5)
us
1
3
usa
2
3
usb , is
1
3
isb .
(12)
From (1) to (5) yields final expression for the
electromagnetic torque.
2
2
Te p s is p s is s is .
3
3
(13)
Before the real time implementation, mathematical
model of induction motor with short-circuited rotor in coordinate system is realized and tested in
Matlab/Simulink in order to test the validity of model
described by (5)-(13).
[rpm]
120
100
80
60
40
20
0
-20
0
0.2
0.4
0.6
0.8
[s] 1
Fig. 16. Speed response under sine-wave voltage step reference
[Nm
]
350
300
250
From (5) follows the stator linkage flux
200
150
s (u s Rs is )dt .
(6)
100
Based on the (5) and (6), - components of the stator
linkage flux Ψs (Ψs , Ψsβ) are calculated as
50
0
-50
s (us Rs is )dt
,
(7)
s (us Rs is )dt
.
(8)
For "Y" stator windings connection, - components of
the stator voltage and current are calculated from
measured a-b-c components as
2
1
u sa u sb ,
is isa ,
3
3
1
2
1
usb , is
isa
isb ,
3
3
3
u s
us
(9)
(10)
and for the "" connection respectively
us usa ,
is
2
1
isa isb ,
3
3
(11)
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
-100
0
0.2
0.4
0.6
0.8
[s] 1
Fig. 17. Estimated electromagnetic torque response under sine-wave
voltage step reference
Step responses with sinus-wave stator voltage supply
and nominal load step (75Nm) in t=0.6 s are presented
in the Fig.16. and Fig.17. The simulation results show
validity of the model described by (5)-(13), with ideal
sinus voltage supply and short-circuited rotor. Real-time
torque estimation performance will be presented in the
section VI with experimental results.
Considering real time application, it is important to
emphasize that special attention has to be paid to the
flux calculation (6) in order to suppress any offset in the
numerical integration without influencing the current
and voltage aperiodic components, [13]-[16].
The flux estimator defined with (6) is referred as
the stator voltage model. This model is difficult to apply
in practice since unavoidable disturbances in voltage
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
and current, ud and id, are superimposed to the ideal
measured signals, us and is, Fig.18. Typical examples of
those undesirable effects are offset and drift which
originate from analogue signal measurement.
Experimental results with estimator in [16] show that the
ideal estimation is possible only if the stator resistance
Rs of the estimator is identical to the estimated
(measured) resistance of the machine and if the
measured current and voltage are without any errors
such as noise or offset errors. This ideal estimation is
happening even though the rotor current differs from
zero.
In order to avoid the stator flux drift and saturation,
the integrator in (6)-(8) is replaced with an adequate
filter, Fig.18, [15]. Using the filter instead of integrator,
low frequency signal (i.e. dc signal) will be attenuated,
but the high frequency signal (ac components) will be
not affected.
us
ud
1
s
Rˆ s
id
is
Fig.18. Calculation of the stator flux using filter instead of pure
integration
As one can see from Fig.18, only electrical stator
values are needed for the electromagnetic torque
calculation. The difference between the obtained
electromagnetic (air gap) torque and the mechanical
(shaft) torque is in the losses originated from friction,
bearings and ventilation, which are mainly a function of
the speed. These quantities can be determined during a
no-load run of the machine.
Functional block diagram of electromagnetic torque
calculation realized on DSP ADMC300 is presented in
Fig.19. After voltages and currents signal processing in
DSP, information of electromagnetic torque is sent to
the overriding system by the fast serial link RS422.
On-line rotor resistor automatic
optimization
In order to achieve effective speed control, rotor
resistor optimization logic is added. This logic changes
the amount of the external added resistance in the rotor
circuit by means of the rotor contactors, Fig.1. Proposed
optimization logic minimizes the stator current of the
motor, taking into consideration the momentary line
voltage, required torque and resistors value tolerance.
In each sampling time at the momentary motor speed,
optimization algorithm calculates maximal torque
produced for each external rotor resistor. Among all
calculated torques available for each additional rotor
resistor, one resistor (the best in optimality sense) will
be chosen and connected to the rotor by means of
contactor. All contactors are handled by digital outputs
(DO) of the process I/O board, Fig.1. The criteria for
external rotor resistor selection can be defined in
software, but usually the criteria is developed maximal
torque. Using this algorithm, the start up adjustment is
reduced, the motor can be used with a less stable line
supply and it is easier to use existing resistors in
revitalization tasks. The schematics of the 5 steps rotor
resistors (R1-R5) with 4 contactors (K0-K3) driven by
process I/O digital outputs (DO1-DO4) respectively is
presented in Fig.20. The resistor value ΣRi in (14) has to
be chosen according to specific industrial application.
For different types of movements (e.g. hoisting, plug
mode lowering, oversynchronous regenerative mode
lowering, traveling, etc) the values suggested in [5] give
trouble-free performance in most situations. Resistor
value ΣRi is calculated as
Rm Rc R1 R2 Ri
100 % ,
R100
where R100 is unity resistance and defined as
Pn
.
R100
2
3 I r 1 s n
Ri
A/D
conversion
TORQUE
ESTIMATION
ALGORITHM
FILTERING
comm.
link to
control
process
board
Fig. 19. Block diagram of the electromagnetic torque estimation
realized with digital signal processor ADMC300
(15)
(16)
Now all the elements for Ri calculation, based on (14),
are noun. Influence of the resistor change in dependence
of the temperature, is considered through the following
equations
Ri C Ri (1 0.9 ( K R / 100 )) ,
(17)
RiW Ri (1 0.6 ( K R / 100 )) .
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
(14)
Unity resistance is defined as resistance that will hold
the motor at zero speed with nominal load and nominal
voltage. The values 8, 18, 38, 65, and 100% of the unity
resistance R100 have been chosen for ΣRi as mostly used
values in industrial applications. The resistors Rm and Rc
are defined as
Rm R100 sn , Rc 0,02 R100 .
stator
voltages
stator
currents
V.
(18)
International Review of Electrical Engineering, Vol. xx,
n. x
International Review of Electrical Engineering (I.R.E.E.), Vol. xx, n. x
START
Uef
n
YES
n > ns
YES
SUP_K3=0
K2 = 1
K3 = 0
NO
YES
TREQ = LIMN
E
R
R
O
R
TORQUE
CALCULATIONS
NO
MODE=0
K2 = 0
K3 = 1
TREQ = LIMP
TORQUE
CALCULATIONS
E
R
R
O
R
NO
NO
T1 > TREQ
NO
T2 > TREQ
NO
T3 > TREQ
NO
T4 > TREQ
YES
YES
YES
YES
K3 = 1
K0=K1=K2=0
K2 = 1
K0=K1=K3=0
K1 = 1
K0=K2=K3=0
K0 = 1
K1=K2=K3=0
NO
T5 > TREQ
YES
Ki = 0
T5 > TREQ
YES
Ki = 0
NO
T4 > TREQ
NO
T3 > TREQ
NO
T2 > TREQ
NO
T1 > TREQ
YES
YES
YES
YES
K0 = 1
K1=K2=K3=0
K1 = 1
K0=K2=K3=0
K2 = 1
K0=K1=K3=0
K3 = 1
K0=K1=K2=0
Fig.20. Flowchart diagram of the automatic on-line rotor resistor optimization
Before the maximal torques calculation logic starts
(Fig.20), mode of operation must be defined. This is
because the rotor contactor logic is working in a
different way for different modes. With the first decision
block in flowchart diagram, it is assigned whether the
drive is in a subsynchronous or in oversynchronous
(plugging or regenerative) region. Drive mode is defined
on the base of direction of the motion requested,
direction of the field (converter state), type of the
motion (hoisting potential loads, traveling reactive
loads) and actual motor speed. The motor must be able
to produce requested torque (TREQ); LIMP is assigned
in Fig.20. as requested torque for positive and LIMN for
negative mode. Then the possible motor torques for each
Ri resistor at each speed for cold and warm state are
calculated according to the following equations
2
2 U 2 TM siCM s I lim
U 2 Ri C
TiC MIN
;
, (19)
s
s 2 siCM 2
2
2 U 2 TM siW M s I lim
U 2 RiW
TiW MIN
;
. (20)
s
s 2 siW M 2
Here TiC and TiW are possible torques in cold and
warm state for i-th rotor resistor at slip s (as a multiple
of nominal torque) and U and Ilim are supply voltage and
current limit. At maximal (breakdown) torque T M, the
values of slip in cold and warm state siWM and siCM are
defined as
Manuscript received January 2007, revised January 2007
si CM Ri C (TM TM2 1) ,
(21)
si CW RiW (TM TM2 1) .
(22)
What are the basics of the automatic rotor resistor
optimization strategy? Check possible motor torques T 5,
T4,..,T1 in sequence to find a Ti that is bigger than
TREQ, Fig.20. As such Ti is found, the right external
resistor (i.e. right contactor switching) is defined.
It is experimentally confirmed in the following section
that the algorithm for on-line rotor resistor calculation
has excellent features in all requested modes of
operation and can replace successfully standard speedbased rotor contactor handler where contactor switching
points has to be calculated in advance, each time for
new industrial application. From an industrial point of
view, this means no extra cost for additional
commissioning caused by speed-based switching points
determination.
VI. Experimental results
Laboratory setup for experimental verification of the
system's performances is presented in Fig.21. (M1wound AC motor: 3x380V, 38,5A, 18,5kW, n=1480
rpm; M2-DC motor, 220V, 91A, 17kW, n=1500 rpm;
separate excitation). Target AC wound motor (M1)
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights
reserved
F. Kolonić, A. Poljugan, A. Slutej
driven by developed controller ASTAT in speed control
mode is mechanically coupled with DC motor (M2).
The latter is driven by the SIMOREG controller in
torque mode loading target AC motor.
2.0
x1000 rpm
Nm
160
1.5
120
1.0
80
Torque
0.5
SIMOREG
40
ASTAT
0.0
0
-40
-0.5
Application software
development and
commissioning tool
M2
M1
E
External rotor
resistors
R
-80
Speed
-1.0
-120
-1.5
-2.0
TG
200
- 160
s
0
2
4
6
8
10
12
14
16
18
20
- 200
Fig.22. Estimated torque and speed feedback in 4q sub-synchronous
operation with potential load (typical hoist drive in crane
applications)
Fig.21. Laboratory test bench for experimental verification
Experimental results have been performed mainly in
the laboratory, but some of them in industrial
environment too (at the site). For the program designed,
data acquisition, measurement, monitoring and
recording, two different platforms during the project
design are developed. The first one is based on the
microcontroller MC68332; PCASE tool for code design
and ASTAT tool as monitoring, recording and
Commissioning and Maintenance Tool (CMT) for the
main application program design. The second one is
based on the digital signal processor ADMC3000 with
alternative tools for code design and CMT; CADSTAR
and PARNAD [5].The latter platform is related to the
speed and torque estimation tasks only.
In this chapter we would like to emphasize that the
following tasks are realized in the design process of
presented controller: speed control task in the industrial
crane
applications
with
mechanical
sensor
(tachogenerator /pulse encoder) and speed estimator;
SEFL logic as effective method for accurate speed
detection in the critical condition mentioned in the
section III.2 (Fig.12); estimated electromagnetic torque
needed for torque feedback loop, for accurate speed
estimation and for automatic on-line rotor resistor
selection.
One of the basic experiments is 4q operation in
hoisting condition with potential load. The result of
testing is presented in Fig.22. For the maximum
trapezoidal-like speed reference in hoisting condition,
drive with emulated load is accelerating with automatic
external rotor resistors switching, which can be seen on
the torque response particularly in the interval of 1-4s.
Afterwards, the full speed reference for lowering a
potential load in reverse current braking (plugging)
mode is ordered. The load is lowering in nonregenerative mode with slip more than 200%! In this
case the load is approximately 70% of nominal motor
torque Tn; at the same time this is a maximal achievable
load torque produced by the DC drive.
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
The performances of the speed control loop with
mechanical sensor and estimated speed (soft) sensor are
presented in Fig. 23 and Fig.24. Recorded variables are,
stator current is, rotor speed n2 and speed reference after
prefilter n_ref_pf. The prefilter is added in the speed
reference only for the laboratory testing. This is because
the parameter of PID speed controller is determined
through the Ziegler-Nichols closed loop test, where such
obtained P and I gains result in high overshoot under
step reference test. Fig. 23. and Fig. 24. present a speed
control system with mechanical sensor and with speed
estimator respectively under positive and negative speed
reference step change in the range of 50-70-50% ns. It
can be seen that the control system with speed estimator
has expected inferior characteristics due to the inherent
delay in estimator explained in section III.2. Introducing
the rotor voltage frequency measurement modification,
see Fig.8, this delay is minimized, which enables
application of proposed controller in large variety of
industrial applications. It can also be seen that for the
both alternatives, the control system considerable
suppress disturbance caused by the rotor resistor change.
The performance of the control system with
tachogenerator (TG) as mechanical sensor in
subsynchronous regime is presented in Fig. 25. It is
hoist drive with active load, where the speed reference is
trapezoidal-like and it is set by joystick. The shape of
the reference can be defined in application software. In
experiment a) active load is 23% of the nominal load T n
and in b) experiments the active load is maximal 70% of
nominal load Tn. For the both experiments automatic online rotor resistor optimization is used. It can be seen
after acceleration in forward direction that minimal
forward torque is needed for braking and speed
reversing in case a); practically, active load is enough to
accelerate in reverse direction.
Since the plugging mode has been chosen and reference
speed is set as synchronous (ns), the controller keeps the
actual speed value just as synchronous by means of
forward motor torque. It would be the same situation
even for the maximal load torque. For b) case, only
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
higher forward motor torque is needed to keep the
lowering (synchronous) speed. When the drive lifts the
load, speed error in steady state is proportional to the
lifting load. This error is a consequence of the actuator
saturation, because synchronous (maximal) speed is set
as the reference speed. The automatic on-line rotor
resistor optimization performance is presented in Fig.
26. For the regenerative mode selected, lowering speed
is higher than synchronous and motor regenerate energy
back to the mains. For this mode of operation special
open loop logic is used which bypass speed controller,
[9]. Active load is then tightly connected to the mains
and designed control logic ensures bumpless return to
the closed speed control loop with TG mechanical
sensor. This experiment evidently confirms that
automatic procedure for the rotor resistor selection
works well. The experiments in Fig.27. show a good
performance of the sensorless drive which uses
estimated speed value based on the estimated rotor
voltage frequency. In both experiments control system in
lowering mode uses different active loads for
regenerative braking.
1200
1200
n_ref_pf [rpm]
n [rpm]
n_ref_pf [rpm]
is [x 0.1A]
1000
1000
800
800
600
600
400
400
n [rpm]
is [x 0.1A]
External rotor
resistor change
200
200
t [s]
0
0
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
0
5
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
Fig.23. Step response of the speed control system with mechanical sensor, speed reference 50-70-50% of synchronous speed.
1200
1200
n_ref_pf [rpm]
n [rpm]
n_ref_pf [rpm]
is [x 0.1A]
1000
1000
800
800
600
600
400
400
200
200
n [rpm]
is [x 0.1A]
External rotor
resistor change
t[s]
t [s]
0
0
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
Fig.24. Step response of the speed control system with estimated speed, speed reference 50-70-50% of synchronous speed.
a)
b)
Fig.25. System responses for the speed reference profile (1500rpm, maximal), TG sensor, automatic resistor selection; plugging braking; active
load; a)23%; b)75%; blue-ref speed and red-actual speed, 0,25ns/div; black-estimated torque, 0,5Tn/div; 2sec/div
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
a)
b)
Fig.26. System responses for the speed reference profile (1500rpm, maximal), TG sensor, regenerative braking; active load 55%; automatic a)
and manual b) resistor selection; blue-ref speed and red-actual speed, 0,25ns/div; black-estimated torque, 0,5Tn/div; 2sec/div
a)
b)
Fig.27. System responses for the speed reference profile (1500rpm, maximal), speed estimator, automatic resistor selection; regenerative
braking; active load; a) 23%; b) 55%; blue-ref. speed and red-actual speed, 0,25ns/div; black-estimated torque, 0,5Tn/div; 2sec/div
a)
b)
c)
Fig.28. Testing at the site (Okselesund, Sweden, 80tones hoist drive), speed control system, speed estimator; regenerative braking a); plugging
b); Testing at the site , BaoSteel, Baoshan, China, 450 tones hoist drive, c); blue-ref speed and red-actual speed (0,25ns/div); black-stator current
(0,5isn/div); green-forward and pink-reverse bridge; time scale1sec/div
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
The Fig.28. a) and b) present the results of the crane
control system monitoring during the commissioning at
the site. The first one is 80 tones hoist drive with speed
estimator presented in regenerative a) and plugging b)
mode of operation. The second one is 450 tones ladle
hoist crane with mechanical sensor, Fig. 28.c). All
recording has been performed by means of the CMT
monitoring tool designed during this project.
VII. Conclusion
We would like to emphasize that the developed
control system is not a servo drive system! It is not
designed for high precision speed control tasks. It is
aimed prior for revitalization tasks of old drives based
on the AC wound machine, but controlled by
components based on the up-to-date technology. The
proposed system provides safe, reliable and simple
control in industrial applications such as heavy duty
material handling systems, steel and rolling mills,
container unloading and uploading cranes, power plants,
etc. Our contributions in the design of proposed
controller are expressed through the following issues:
original rotor speed estimation technique based on the
rotor voltage frequency estimation with implementation
on the industrial crane controller (method and device
patented!); related to the speed estimation, nonlinear
estimation freezing logic (SEFL) is designed for
accurate speed estimation in the operating region where
the rotor voltage signal is not acceptable for accurate
frequency estimation (AC/AC converter dead time,
operation region with small load and with small slip);
implementation of the electromagnetic torque estimator,
based on the stator voltages and currents measurements,
needed for accurate speed estimation, for automatic online rotor resistor selection and for the feedback sensor
in the torque control loop; original algorithm for
automatic on-line rotor resistor optimization logic which
selects rotor resistor in order to get maximal developed
motor torque at each microcontroller’s sampling time.
It is experimentally confirmed on the laboratory test
bench and through recording at the site, that speed
control system with soft sensor achieves good
performances. SEFL logic involved in the control
approved the safe operation which has been attained in
all operation modes, especially in the regenerative mode
of operation, which is particularly important in the hoist
crane drives. The experiments confirmed good
functionality of the speed open-loop logic in the
regenerative mode owing to the bumpless technique we
applied. The process of energy recuperation is very
simple and more effective than in the case of a
frequency controlled AC squirrel cage motor supplied
by inverter.
The experimental tests of the automatic on-line rotor
resistor optimization logic confirm excellent features in
the all requested operating modes and proposed logic
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
can replace successfully standard speed-based rotor
contactor handler. Comparing to the classical (manual)
speed-based rotor resistor switching, there is no
considerable difference in performances in the first
moment. However, in speed-based rotor contactor logic
switching points have to be calculated in advance, each
time for the new industrial application, which leads to
extra cost for additional commissioning.
Within the development of the advanced industrial
crane controller based on the AC wound machine, we
have designed a modular system capable to deal with
control, communication, protection and other specific
industrial demands. Such controller, either as new drive
or revitalized, can be integrated as a client in the control
network, used in crane motion concept with digital drive
controller system.
Acknowledgement
The project of industrial controller (with commercial
name ASTAT®) is a result of joint cooperation between
the Faculty of Electrical Engineering and Computing,
the University Zagreb (Croatia) and the Swedish
company ABB, and it is financially supported by ABB.
As a result of this cooperation, over 3000 industrial
applications, especially in the crane and other heavy
duty material handling systems are installed all over the
world.
Based on our investigation of the crane control
system related to the sensorless speed control technique,
our industrial partner ABB patented the method of speed
estimation:
Patent No: WO01/27637 Device and a method for
estimating the speed of a slip ring asynchronous
machine
References
[1] ….., ASTAT, Semiconductor controller for slip-ring motors
[2]
[3]
[4]
[5]
[6]
Manual, ABB Industrial Systems AB, Crane & Harbour
Systems, ReklamCenter AB (6032), Västerås, Sweden, 05/1996.
….., SIMOTRAS HD – Der neue Drive für Krane mit
Schleifringläufermotoren, Excellence in Automation & Drives,
Siemens, Erlangen, 04/1999.
A. Slutej, F.Kolonić, Ž.Jakopović, The new crane motion control
concept with integrated drive controller for engineered crane
application, Proceedings of the IEEE International Symposium
on Industrial Electronics, ISIE’99, July 12-16, 1999. Bled,
Slovenia.
A. Slutej, F. Kolonić, Control network as a backbone of the
crane motion control system, Proceedings of the 10th EPEPEMC 2002 (CD ROM), September, 9-11, 2002,Dubrovnik,
Croatia.
...., ASTAT Crane Motion Control, (CD-ROM), Manual, ABB
Automation System, 2003.
A. Slutej, L.T. Hansson, F. Kolonic, Steel mill crane motion
control with a new integrated drive controller, Proceedings of
International Review of Electrical Engineering, Vol. xx,
n. x
F. Kolonić, A. Poljugan, A. Slutej
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
the 10th International Symposium EDPE’98, October 14-16,
1998, Dubrovnik, Croatia
N. Mohan, T.M. Undeland, W.P. Robins, Power Electronics:
Converters, Applications and Design (John Wiley and Sons,
1989).
B.K.Bose, Power Electronics and AC drives (Prentice–Hall,
1986).
A. Poljugan, Speed estimator design for industrial controller
based on AC wound machine, Mr.sc. Theses (in Crotian), Dept.
of.El. Machines, Drives and Automation, Faculty of El. Eng.
and Computing, University of Zagreb, Croatia, 2005.
A. Slutej, F. Kolonić, A. Poljugan, Crane control Network, 13th
International Conference on Electrical Drives and Power
Electronics, (2nd Joint Croatia_Slovakia Coference),
EDPE'05, September 26. – 28, 2005, CD-ROM, Dubrovnik,
Croatia
P.W. Lefley, W. Peasgood, R. Ong, J.K.J.Wong, Sensorless
closed loop control of a slip ring induction machine using
adaptive signal processing, Applied Power Electronics
Conference and Exposition, APEC apos;99. Fourteenth
Annual, 14-18 March, 1999.
Poljugan, Alen; Kolonić, Fetah; Slutej, Alojz. DSpace Platform
for Speed Estimation AC Slip-Ring Motor in Crane
Mechatronic System, Proceedings (and CD-ROM) of the 11th
International Power Electronics and Motion Control
Conference, EPE – PEMC ’04, Riga, Latvia.
C. Lascu, G. Anfreescu, Sliding-Mode Observer and Improved
Integrator With DC-Offset Compensation for Flux Estimation
in Sensorless-Controlled Induction Motors, IEEE Transactions
on Industrial Electronics, vol. 53, no. 3, June 2006, pp. 785794.
Mihai Comanescu, Longya Xu, An Improved Flux Observer
Based on PLL Frequency Estimator for sensorless Vector
Control of Induction Motors, IEEE Transactions on Industrial
Electronics, vol. 53, no. 1, pp. 50-56, February, 2006
J.Holtz, Sensorless Control of Induction Machines-With or
Without Signal Injection, IEEE Transactions on Industrial
Electronics, vol. 53, no. 1, February, 2006, pp. 7-30.
B. Peterson, Induction Machine Speed Estmation Observations on Observers, Ph.D. dissertation, Dept. of Ind.
El. Eng. and Automation (IEA), Lund Institute of Technology
Lund, Sweden, 1996.
Copyright © 2007 Praise Worthy Prize S.r.l. - All rights reserved
Fetah Kolonić (1956) received his
Ph.D.E.E. in 1997, M.S.E.E. in 1990 and
B.S.E.E. in 1980 at the University of
Zagreb, Croatia. He is currently associate
professor at the Faculty of Electrical
Engineering and Computing, University of
Zagreb. His major fields of study are control
of electrical drives and power converters,
optimal and robust control of industrial
systems and integration structure in the complex mechatronic
systems.
He has been author of many papers published in journals and
presented at national and international conferences. As principal
investigator and project leader he has been conducting several
projects funded by international and Croatian industries as well as by
the Croatian government. His teaching and research include
application of advanced control techniques in industrial systems.
Dr. Kolonić is a member of K¸oREMA (Croatian Society for
Communication, Computing, Electronics, Measurement and Control,
IEEE (Robotics and Automation Society, Industrial Electronics
Society) and the Croatian section of Cigre (International Council for
Large Electric Systems).
Alen Poljugan (1977) received his
M.S.E.E. in 2005 and B.S.E.E. in 2001 at
the University of Zagreb, Croatia. From
2001 he has been working as assistant at the
Faculty of Electrical Engineering and
Computing (Department of electrical
machines, drives and automation). His fileds
of interests are control of electrical drives
and power converters, optimal and robust control of industrial systems
and integration structure in complex mechatronic systems.
He has been co-author of several papers published at national and
international conferences.
Alojz Slutej (1950) received his Ph.D.E.E.
in 1986, M.S.E.E. in 1981 and B.S.E.E. in
1980 at the University of Zagreb, Croatia.
He is employed as Senior System Engineer
and works as technical expert in ABB Crane
& Harbour division in Sweden. Partly, he is
engaged as associate professor at the Faculty
of Electrical Engineering and Computing,
University of Zagreb. His interest is mostly
in hardware and software development regarding automated container
cranes activities.
He has been co-author of many papers published in journals and
presented at national and international conferences.
Dr. Slutej is a member of the IFAC CCD Technical committee for
distributed control systems, AISE (USA Association of Iron and Steel
Engineers) and KoREMA (Croatian Society for Communications,
Computing, Electronics, Measurement and Control).
International Review of Electrical Engineering, Vol. xx,
n. x