- the Journal of Information, Knowledge and Research in
advertisement

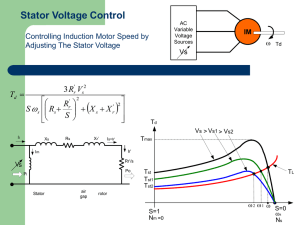
JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING FIELD ORIENTED CONTROL OF INDUCTION MOTOR USING MATLAB SIMULINK 1HIREN 1, 2 M. PATEL, 2PANKIT T. SHAH, 3HEMANGINI V. PATEL M.TECH Electrical (Power System), Department of Electrical Engineering, VJTI Matunga, Mumbai-400019, Maharashtra, India. 3 B.E. Electrical, Department of Electrical Engineering, Faculty of Tech & Engg, The MSU, Baroda-390001, Gujarat, India hiren_power@yahoo.com , pankit_power@yahoo.com, hema_power17@yahoo.in ABSTRACT : Induction motor is main workhorse of the industry. Scalar control of induction motor has good steady state response but poor dynamic response. But vector control method has good steady state as well as dynamic response. Vector control method makes performance of induction motor very close to that of separately excited DC motor which is best as far as controlling of speed and torque is concern. This paper discusses the Field oriented control of induction motor. This drive designed in MATLAB SIMULINK. Stator current, rotor speed, electromagnetic torque and stator flux are obtained which shows the performance of the drive. Drive also tracks the reference speed and torque properly. KEY WORDS: Induction Motor, Field Oriented Control, MATLAB SIMULINK. 1. INTRODUCTION In initial years, DC motors were used in applications where high performance in variable speed and variable torque operations was required. Separately excited DC motors were extremely used in areas where fast response of speed and torque required. It was main workhorse in industries. It has inherent DE-COUPLING facility of independent control of torque and flux in the motor. DC machines had its disadvantage like maintenance, sparking, difficulty in commutation at high current and voltage, so it is limited to low power and low speeds. After the invention of induction motor and power electronics, difficulties related to DC machines were overcome but it did not have inherent DECOUPLING property between torque and flux which was a major factor in controlling a speed and improving dynamic response. Those were Scalar control methods which have good steady state response but poor dynamic response. They control only magnitude of controlling vector but didn’t have to deal with its phase [1]. So, some kind of controls required which make independent control of flux and torque channel in induction motor and makes the performance of induction motor just like separately excited DC motor which is best for speed and torque control applications. These controlling methods were vector control. They deals with controlling of magnitude, phase and frequency of controlling vector which makes de-coupling of flux and torque channel. In this paper field oriented control (FOC) method of induction motor discussed. This drive is simulated in MATLAB SIMULINK and stator current, rotor speed, electromagnetic torque and stator flux obtained as output. Also good tracking of reference speed and torque is obtained. 2. PRINCIPLE OF FIELD ORIENTED CONTROL In 1971, Blaschke proposed a scheme, which represents the control of induction motor like a separately excited dc motor, called “Field Oriented Control or Vector Control”. In an AC machine, both the phase angle and the modulus of the current must be controlled. This is the reason for the terminology ‘Vector Control’. In this scheme, the induction motor is analyzed from a synchronously rotating reference frame where all the fundamental AC variables appear to be DC equals. The torque and flux components are identified and controlled independently to achieve good dynamic response. Vector control implies that an AC motor is forced to behave dynamically as a D.C. motor by the use of feed back control [1]. Field-oriented control (FOC) of induction machine achieves decoupled torque and flux dynamics. This is achieved by orthogonal projection of the stator current into a torque-producing component and flux-producing component. This technique is performed by two basic methods. Direct and indirect vector control. With direct field orientation, the instantaneous value of the flux is required and obtained by direct measurement using flux sensors or flux estimators, whereas indirect field orientation is based on the inverse flux model dynamics and there are three possible implementation based on the ISSN: 0975 – 6736| NOV 10 TO OCT 11 | VOLUME – 01, ISSUE - 02 Page 56 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING stator, rotor, or air gap flux orientation. The rotor flux indirect vector control technique is the most widely used due to its simplicity. FOC methods are attractive but suffer from one major disadvantage. They are sensitive to parameter variations such as rotor time constant and incorrect flux measurement or estimation at low speeds [3], [4]. Basic block diagram of FOC is shown in figure 1 [2]. Figure 1 Basic block diagram of FOC 3. MATLAB SIMULATION ORIENTED CONTROL OF MOTOR OF FIELD INDUCTION shown in figure 2. The simulation time is 3 seconds and sampling time is 2 micro seconds. For case study, induction motor taken has parameters listed in table 1. Speed controller for FOC is shown in figure 3. Here indirect field oriented control of induction motor is simulated in MATLAB SIMULINK as Table 1 Motor Output Motor terminal voltage Supply frequency Stator Resistance Stator Inductance Rotor Resistance Rotor Inductance Mutual Inductance Inertia Friction Factor Pole Pairs 200 HP 460 V 60 Hz 14.85e-3 Ω 0.3027e-3 Henry 9.295e-3 Ω 0.3027e-3 Henry 10.46e-3 3.1 0 2 Figure 2 FOC of induction motor in MATLAB SIMULINK ISSN: 0975 – 6736| NOV 10 TO OCT 11 | VOLUME – 01, ISSUE - 02 Page 57 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING Figure 3 Speed controller for FOC Using park transformation and inverse park transformation and signals from the machine we have shown the control strategy of FOC of induction motor in figure 4. Figure 7 This block (figure 7) produces q-component of stator current (Iq). This block uses the equation, Iq= Te/(Kte * λ) Where, Iq = q- component of stator current Te = torque Kte = (2/3)* (P) (Lm/Lr) P= pole pair Lm =mutual inductance Lr = rotor inductance λ = flux Block K represents (1/Kte). Block 4 Figure 4 Field Oriented Controller for Induction Motor All blocks are represented as shown in figure below. Block 1 Figure 8 This block (figure 8) produces phasor angle theta for stator current. It produces Wm (mechanical speed) using Iq and λ as shown in figure by A block. Wr = Rotor frequency (rad/s) = Lm *Iq / (Tr * λ) λ = Lm *Id / (1 +Tr .s) Figure 5 Tr= Lr/Rr Rr= rotor resistance This block (figure 5) generates flux error signal as shown in figure. Difference between reference and actual flux is processed through PI controller and limiter. Block 2 Theta= Wr + Wm This summation is shown in figure by B block. Figure 6 This block (figure 6) produces d-component of stator current (Id) from the flux. Figure 9 This block (figure 9) generates flux from dcomponent of stator current. Block 3 Inverse park transformation Block 5 ISSN: 0975 – 6736| NOV 10 TO OCT 11 | VOLUME – 01, ISSUE - 02 Page 58 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING Figure 14 Electromagnetic Torque Figure 10 This block (figure 10) represents the inverse park transformation which uses theta and d and q components of stator current and produces ABC stator current required to drive induction motor. Figure 15 DC bus voltage Park Transformation Figure 11 This block (figure 11) represents park transformation which converts ABC to DQ signal of stator current. 4. SIMULATION RESULT FOC is simulated in MATLAB which gives the result as shown in figures below for stator current (figure12), Rotor Speed (figure 13), Electromagnetic Torque (figure 14), DC bus voltage (figure 15), Stator Flux (figure 16), Rotor Flux (Figure 17), Rotor Current (figure 18) and Rotor Angle (figure 19). As shown in figure 13 and 14, rotor speed and electromagnetic torque of simulated FOC drive properly track reference values respectively. Figure 16 Stator Flux Figure 12 Stator current Figure 17 Rotor Flux Figure 13 Rotor Speed ISSN: 0975 – 6736| NOV 10 TO OCT 11 | VOLUME – 01, ISSUE - 02 Page 59 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING Figure 18 Rotor Current Figure 19 Rotor Angle (rad) 5. CONCLUSION From the simulation of FOC of induction motor in MATLAB SIMULINK, we have found out different result as shown above figures. Reference speed and torque values are properly track by the drive. This represents the proper design of the drive. 6. REFERENCES [1] Electromagnetic Motor Drives- Modeling, Analysis and Design, R. Krishnan, Verginia Tech, Blacksburg, VA, Prentice Hall, Upper Saddle River, New Jersey 07458, pp 411-501 [2] NEC Application Note, An Introduction to Vector Control of AC Motors Using the V850, Document No. U16483EE1V0AN00, Date published: November 2002 [3] Brett Hovingh, W.W.L Keerthipala, WeiYong Yan, Sensorless Speed Estimation of an Induction Motor in a Field Orientated Control System [4] C. Nen, W. Schmitt, K. Karakaxis, S. N. Manias, Adaptive Control System For A Field Oriented Induction Motor Drive, Department of Electrical & Computer Engineering, Electric Power Division 42, 28th October Str., 106 82 Athens, GREECE ISSN: 0975 – 6736| NOV 10 TO OCT 11 | VOLUME – 01, ISSUE - 02 Page 60