mathematics of the cassini `s journey to saturn
advertisement

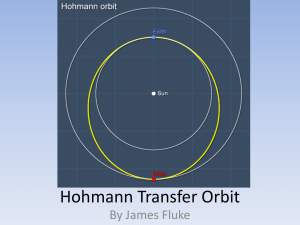
MATHEMATICS OF THE CASSINI’S JOURNEY TO SATURN (1997 - 2004) Michael P. Wnuk NASA Visiting Scientist at JPL/Caltech July 2000 1 MATHEMATICS OF THE CASSINI ‘S JOURNEY TO SATURN (1997 – 2004) by Michael P. Wnuk ASEE/NASA Summer Faculty at JPL/Caltech Permanent affiliation: University of Wisconsin – Milwaukee CONTENTS 1. Introduction - An Overview of Cassini Mission - Cassini as a Link Between Newton’s Orbital Mechanics and the Space Exploration Program in 21st Century 2. Numbers, Functions and Operators - Numbers - Functions - Operators - Differential Equations 3. Calculus Underlying Orbital Mechanics - Motion in the central force field - Orbits of planets and spaceships - Navigating the Spaceship 4. Scalars, Vectors, Quaternions, Matrices and Tensors - Scalars that describe Cassini mission - Vectors and quaternions pertinent to the mission - Matrices and tensors applicable to the mission 2 MATHEMATICS OF THE CASSINI ‘S JOURNEY TO SATURN (1997 – 2004) by Michael P. Wnuk ASEE/NASA Summer Faculty at JPL/Caltech Permanent affiliation: University of Wisconsin – Milwaukee 1. Introduction At the onset of the 21st century, in July of the year 2004, a man-made device will be landing on the cold surface of Titan, one of the moons of Saturn. It is a giant moon by all standards, it is bigger than a planet Mercury and so, it was able to retain its own atmosphere, lakes and maybe even oceans of methane and ethane. Of course, it pales in size compared to the planet Saturn, which holds Titan permanently in the grasp of its gravitational field. The Cassini spacecraft that shall deliver this device, called the Huygens probe, to the surface of Titan is an American built spaceship, designed and launched by NASA. One substantial section of the NASA’s Jet Propulsion Laboratory in Pasadena, California is involved in navigating and controlling the Cassini ship as it hurdles into the deep space further and further away from Earth heading toward its final destination - Saturn, which is not to be reached until July of 2004. The mission began on October 15 of 1997 when the Cassini ship weighing some 5,600 kilograms was launched into space by the most powerful US Air Force rocket, Titan IV/Centaur, out of Cape Canaveral. The launch was flawless, and it provided enough acceleration to the spacecraft so that the “escape velocity” was exceeded allowing the ship to leave the gravitational field of Earth and sail toward the vast space of the planetary system. During the initial stage of the journey (1997 - 1999) the trajectory of the Cassini’s flight seemed to be a bit convoluted, as it involved a lot of backtracking and sudden twists in otherwise regular elliptical orbits. These strange maneuvers were motivated by a desire to get a “free ride”, at least some of the way. Such free riding is made possible when the gravitational pull of the large celestial bodies, such as Earth, Venus and Jupiter is put to work to accelerate the ship by a rapid variation of its orbit. Each time such a sudden change in the trajectory of the spacecraft occurs, the velocity is increased at no expense of the rocket fuel. Operations of this type are known in the Orbital Mechanics as “gravitational assist” maneuvers. Four of those are planned for the Cassini, two involving Venus, then Earth and the last one is to be carried out in the vicinity of Jupiter, see the Figures ii, iii and iv. Total savings on fuel amounts to 75 tons of rocket fuel, not an insignificant number. 3 The most recent swing-by of the Cassini spaceship required a close encounter with the planet Earth. In fact, Cassini’s altitude during this swing-by operation was only 1176 km above the surface of Earth, which is considerably less than the altitude of geostationary satellites that orbit Earth at 42,164 km above the sea level. The speed of the Cassini spaceship, though, equaled then 19.03 km/sec, which exceeded the escape velocity from this particular height (10.29 km/sec) by a factor of 1.85. This provided an ample margin of safety, and is something to think about for people who tend to worry about objects from space coming into close proximity with our planet. This event took place on August 18 of 1999. The “slinging action” of Earth gravitational field did not fail, and Cassini is now on its way to Jupiter, where the last gravity assisted boost of the ship velocity will be executed on December 30, 2000, see Figure ii. After that, sometime around July 1 of 2004 the ship will approach its destination site, the majestic planet of Saturn, hugged by the set of rings, consisting of zillions of the tiny frozen rocks that like miniature moons circle around the planet, all positioned in one plane. Ship engines will then be turned on to slow it down and maneuver through the gap in the rings to get the ship into the position suitable for expelling the Hyugens probe in the direction of Titan. It will take 3 weeks for the probe released from Cassini to descend and land (hopefully not crash) on the surface of Titan. This giant moon resembles the primordial Earth, as it existed billions of years ago. Whatever is learned from this frontier exploration mission to Titan may help to solve the mysteries of our own past, speaking in the astrophysical time units, of course. Thus, we may learn how did Earth develop from its early stages of growth to what it is today: an extraordinary life-supporting planet that by all standards appears to be unique in the vast and hostile universe that surrounds us. Better understanding of the mechanism by which the icy rings of Saturn were formed will help the astrophysicists to revise their theories about the origin and evolution of galaxies and galaxy clusters. And this is an important chapter in the history of the Universe. To put it briefly, the information and bits of data transmitted back to Earth from the Cassini spaceship will influence not only the scientific thinking (as it already does), but it may alter certain technologies, especially in computer sciences and communications, currently in use on Earth. Therefore, the two primary aspects of the Cassini mission, the fundamental and the applied one, are so intricately interconnected that no one can discern a clear boundary between them. Data collected by the Hyugens probe will be transmitted back to Earth to be intercepted by the three large radio-antennae positioned in a triangle involving three continents: Australia, Spain and California. The spacecraft itself will have sufficient amount of power (generated by its onboard radioactive electrical device) for the period of 4 years. The research and the data to be collected are focused, among other things, on the nature of the magnetic field of Saturn. This field is of a peculiar shape, greatly distorted and so uniquely asymmetric that there is nothing like it in the entire 4 solar system. After 2008 the transmission of data via radio signals will cease (formally the mission ends in 2008), but the spacecraft Cassini will forever remain within the hold of the powerful gravitational field of Saturn. A mere speck of dust in the sky, circulating an intricate path of elliptical orbits without end… and yet, a wonderful proof of the presence of some smart thinking species in the Universe, us. And, since it took 33 states within the United States and 19 nations in Europe to participate in the preliminary stages of the project, the Cassini mission may truly be said to represent the best of what today’s science and technology – measured on the global scale – can do. Continuity of human thought is remarkable. What began in 1655 with the observation of the Saturn’s rings by the Dutch astronomer Christian Hyugens, and was followed by about two decades later by discoveries of French-Italian astronomer JeanDominique Cassini (who found four of the Saturn’s moons), will now be used to guide the spaceship Cassini through the gap in the rings plane and eventually land the Hyugens probe on the surface of Titan, a good observation point to take a closer look at this spectacular planet. For science, an almost four centuries of elapsed time that separate the past and the present discoveries appear to have no significant meaning. When the cornerstone of all Mechanics (including Celestial Mechanics), Newton’s awesome book of “Principia” appeared in print, the author of the book was asked how was he able to determine with mathematical precision the laws that so absolutely guide remote celestial objects in their orbits. Newton’s answer was “I stood on the shoulders of the giants”. What he meant by this were the discoveries, which preceded him, those of Polish astronomer, Nicholas Copernicus, a bold proponent of the heliocentric system, and those of a German scientist, Johannes Keppler, who modified Copernicus’ circular orbits to the elliptical ones. These elliptical orbits were then confirmed mathematically by Newton’s Universal Law of Gravity – one law for the entire Universe. Excluding extremely minor corrections arising from the Einstein’s General Theory of Relativity, these findings of the past “giants” stand the test of time. Figure “i” illustrates an astonishing evolution in the planetary science since 1676, when Cassini drew a sketch of Saturn, till 1981, when Voyager 2 sent to the NASA base on Earth a picture of Saturn, shown in the figure. The next step will be a closeup view of Saturn that we will receive in July 2004 when Cassini arrives at its destination. The progress of the mission is documented by the Figures ii, iii and iv. 5 Figure i. The original sketch drawn by Jean-Dominique Cassini in 1676 (top), and the picture of Saturn received via radio signal from Voyager 2 in 1981 (bottom). 6 7 Figure ii. Outline of Cassini’s trajectory for the entire journey from Earth to Saturn (October 15, 1997 - July 1, 2004). Four gravitational assist maneuvers, which require a “close encounter” with another planet, such as Venus (twice), Earth and Jupiter, are shown in this diagram. 8 Figure iii. Our own planet and the Cassini spaceship during the “swingby” maneuver on August 18, 1999. 9 Figure iv. Closest approach to Venus for a gravitational assist maneuver on April 26, 1998. 2. Numbers, functions and operators. Numbers We all know what numbers are. Today, even toddlers can count. I am told that they loose this ability, though, somewhere in high school when they are introduced to the computers. Relations between numbers are often expressed with aid of the algebraic equations, in which symbols, such as “a”, “b”, “c” or “x” are used to designate a certain number. You may not remember all different names of groups of numbers, which may be referred to as natural, rational, irrational, decimals, real, imaginary, complex, quaternions – and what else do we have? They are all numbers, no more complicated then a lengthy string of numerals that makes up our Social Security number or your checking account number. It is the manipulations performed on these numbers that are of interest to us. To begin to manipulate we need to introduce the notion of a function. Functions Let us begin with a simple demonstration, in which an everyday situation will be interpreted in a scientific way. Suppose, you inserted 75 cents into a vending machine, and then made your selection by pressing a button “Coca Cola”. Let’s reiterate: 75 cents go in, a can of coke comes out. This, in fact, is what all functions do: they transform the data at the input (a number) into the result obtained at the output (another number). To make our vending machine comply with this strict definition, the coke would have to have a certain number assigned to it; but this does not alter the general principle. The numbers used for input are said to belong to a set named domain, while the outcomes belong to a different set, called range. The easiest way to think of a function is to visualize a black box equipped with an input, an output and labeled with some sort of a suitable name; the name is necessary to distinguish one function from another. If we depart from the vending machine and venture into the realm of numbers, we may suggest the following designations for the three elementary functions: f1(x) = x2 f2 = sin(x) f3(x) = exp(x) Now, we are using symbols (instead of objects), but the meaning is the same. To demonstrate the action of these four functions (the fourth one is our vending machine, don’t forget it), we have collected all examples in Fig.1a, and – by using the black box concept, we have shown how all of these functions work. This should be rather obvious, but to make it even more obvious we have collected the pertinent data in Table 1. 10 Table 1 Function fl(x): input 1 2 3 output 1 4 9 f2(x): input 0 /4 /2 output 0 .7071 1 f3(x): input 0 1 2 output 1 2.7183 7.3891 In fact, almost all phenomena that are seen, experienced or measured can be represented by one function or another. Functions results from reasoning, which is either elementary (well, what’s “elementary” for the master Sherlock Holmes, may not always be so for dear Dr. Watson), or they arise from Calculus. And, what is this benevolent monster, the Calculus? To answer this question we need to learn a little bit about manipulating functions, such as transforming one into another and the like. This proposition resembles somewhat a dirty trick common to all wicked witches; changing a prince into an ugly frog, or vice versa. That’s exactly what we propose to do in the following sub-section with some help from our mathematical magic wand – an operator. Operators Calculus implies use of operators and these are intimately related to the differential equations. What are these mathematical contraptions? First of all, they are perfectly innocent, since they do no harm, just transform one entity into another. In most cases by “entity” we mean a function – but not necessarily. When you travel abroad and visit several countries, you will have to convert your home currency, say dollars, into foreign currencies such as pounds, zloties, marks, tolars, liras, francs, rubles etc. This simple feat is accomplished at the local bank or an exchange post that accepts the US dollars and produces equivalent amount of other currency. Symbolically, we can describe these operations as follows. With M denoting a money-changing operator, we can write the following statements: MGB[$] = English pounds MPL[$] = Polish zloties MDE[$] = German marks MSL[$] = Slovenian tolars MI[$$] = Italian liras MF[$$] = French francs MRU[$] = Russian rubles MMX[$] = Mexican dollars Note that the subscripts used on each “M” comply with the official designation of the country, for which the operator M applies. In a very analogous way Table 2 shows several mathematical operators in action; they are both linear operators, L, and nonlinear operators, N. Symbols “x” and “s” are used to designate variables, while “a” is a constant. 11 Table 2 d Ldiff sin x sin x cos x Ldif1 f dx d Ldiff exp x exp x exp x Ldif1 f dx Lint sin x sin x dx cos x Llaplace sin ax cos x sin x exp x exp x Lint1 cos x sin x as 1 Llaplace a 2 s 2 sin ax as a s2 2 2 d N diff sin x sin x cos 2 x dx 1 N int sin x e x sin x dx sin x cos x exp x 2 2 d y N y x 2 4sin y x y exp x exp x 4sin exp x dx In this Table we have used classic examples of what becomes “bread and butter” to a professional mathematician. Symbols “L” are reserved for linear operators, while “N’s” are used to denote the nonlinear operation. And, finally, the superscript “-1” designates an inverse operation. This you can easily verify by reading the lines containing L-letters backwards. If there is no mistakes in Table 2, the reverse reading should produce the same result as the L-1 operators do. For example, the inverse Laplace operator Llaplace-1 applied to the fraction as/(a2 + s2) produces the original function sin(ax), as expected. We see a pattern emerging from this selection of various operators. Each time an operator is put to work, it transforms one function into some other function (which is not much different from the trick of a wicked witch, as described above). When you see symbols d such as or dx , don’t worry. If they are not in your everyday vocabulary, just dx accept them as various “road signs” used in Calculus. Fig. 1b uses the concept of a black box to illustrate action of the Laplace and the inverse Laplace operators. 12 Figure 1a INPUT (number) 75¢ OUTPUT (number) Vending Machine ƒ (x) 1 2 3 ƒ1 (x) 0 /4 /2 ƒ2 (x) 0 1 2 ƒ3 (x) Can of Coke 1 4 9 0 2/2 1 1 2.7183 7.3891 Figure 1b INPUT (function) OUTPUT (function) sin(ax) Llaplace as a2 + s2 as a2 + s2 L–1 laplace sin(ax) Figure 1. Black box representation of the action of a function (a), and an operator (b). 13 INPUT W OUTPUT Operator W (wicked witch in bad mood) W–1 Operator W –1 (wicked witch in good mood) Figure 1c. Concept of an operator, W, and an inverse operator, W – 1 . 14 Differential Equations Since all phenomena encountered in the physical world involve certain numerical entities – such as functions – and these are usually not independent variables, but they enter into numerous less or more intricate relationships, we must somehow cope with this state of affairs. To “cope” in this context requires writing a differential equation, which is capable of recording symbolically these various relationships, often dictated by the Laws of Nature rather than a whimsical fantasy of a pure mathematician (but these cases are not excluded, either). To do the right bookkeeping of all the changes and transformations performed on the various functions, we need – first of all – operators, and then, we need the differential equations that add precision to keeping track of these changes. To state this briefly, we are ready now to enter the world of operators and functions (far in the background, of course, will remain our good friends – numbers). A great Swiss mathematician, Euler, once said that nothing is quite complete, until a number is generated, and he was right. Here, we are playing a high-level game of functions and differential equations, but at the end of the game we want answers. And these come – more often than not – in form of numbers. A classic analogy can be given here: when the slide-rules were replaced by the hand-held calculators, engineers used to keep both a slide-rule and a calculator handy, just in case when some doubtful results had to be double-checked. When the first generation of computers showed up, the skeptical scientists kept their calculators handy (and they still do!). And, so it goes on. When we are through with a complicated boundary value problem (to be discussed in a little while) and whip some functions out of the fancy differential equations, we always check how reasonable the results are by… looking at the generated numbers. To bring this point home, let us take a look at the ubiquitous exponential function, f(x) = exp(x). It can be generated in many different ways. Since it is common in nature, it is used to describe population growth, stock exchange variations, radioactive decay, nuclear reaction processes, learning and artificial intelligence and innumerable other phenomena, whether they are designed by man or arise from nature. The classic example, quoted in many textbooks, relates to the population growth and it goes somewhat like this. Imagine starting a colony (of humans or some other species) on an inhabited island. At the start you have N people, say the survivors of a shipwreck. We assume that both sexes are present and that there no predators present, while the food and energy are plentiful. You would now expect that the rate, at which this population will grow, should be proportional to the current size of the population in question. Switching to Calculus, we reduce this lengthy sentence to a simple statement: Rate is proportional to number N, or better yet dN/dt = k N (1) Here, t denotes time and k is a certain constant, value of which is not essential to our considerations, and it may be set to be equal one (or anything else you want). In fact, this proportionality constant in a large measure depends on the mood of two partners of the opposite sex, who may desire to make love with an intention to produce an offspring. With k = 1, Eq. (1) is re-written as 15 dN/dt – N = 0 (2) subject to an additional (initial) condition that states N=N0 at time equals zero. Of course, we expect N to be a certain function of time, say N = N(t). Equation (2) is an example of a linear differential equation (DE) of the first order, the simplest one in the book. We notice that the operator d/dx[ ] is listed in Table 2 as Ldiff. Thus Eq. (2) can also be expressed in the form Ldiff[N(t)] = N(t) (3) This equation contains an unknown function, N(t). What is this function? Well, if you look to the left column listing various operators in Table 2, the only differential operator that converts a function into itself is listed in the second position from the top, and the function is (note that the independent variable “x” has been replaced by time t): F(t) = exp(t) (4) When the initial condition is applied, stating that at time zero we have started a colony containing N0 individuals, the function (4) can be adjusted to provide the solution to our problem defined by the differential equation (1) or (2), namely N(t) = N0 exp(t) (5) It is best if time t is expressed as a ratio t/T, where T is a characteristic time interval, such as 9 months for the humans (on this planet). Then our solution acquires the form N(t) = N0 exp(t/T) The outcome is shown in Fig. 2. 200 (6) 200 180 160 140 120 f() 100 80 60 40 20 10 0 0 0 0.3 0.6 0.9 1.2 1.5 1.8 2.1 2.4 2.7 3 3 Figure 2. Population increase over three characteristic time intervals according to Eq. (6). Note that the starting number was 10, while the characteristic time T = 9 months. Functions are not only useful, but they are also fun to work with. Let us switch the gears and talk Dynamics for a brief while (this will bring us closer to the main topic: the Cassini mission). Look at Figure 3. If all forces acting on the block of mass m are accounted for, such the viscous force, cdx/dt, the elastic resistance of the spring, kx, and the inertial force, md2x/dt2, the following relation emerges 16 Damper Spring c k m C Free body diagram revealing all forces cdx/dt Mass m kx C x Fext x Fext Figure 3. Block of mass m suspended on a spring and a viscous damper and set into a vibratory motion. 17 d 2x dx m 2 c kx Fext t dt dt (7) Of course, all of the above complies with the 2nd Law of Newton Force = mass x acceleration Symbol Fext denotes an external force applied to the center of mass of the block m. Setting the externally applied force Fext(t) to zero (for simplicity) and assuming these constants: m = 2, c = 1 and k = 8 (all quantities must be expressed in the correct units!), we obtain d 2x dx 0.5 4 x 0 2 dt dt (8) Since this is a second order linear differential equation, we need to specify how the motion of the block “m” was started. To do this, the initial position x(0) and the initial velocity v(0) must be given (we note that the velocity and the position are related by the differential operator, v(t)=dx(t)/dt). Let us choose the following initial values: x(0) = 0 , and v(0) = 1 (8a) The solution is not difficult to find, and it reads x(t) = 0.5040 exp(-t/4) sin(1.9843 t) (9) This formula describes precisely the position of the center of mass of the moving body at any given time. As can be seen from Fig. 4 the vibratory motion is neatly described by a wave-like function diminishing in time due to the presence of the viscous damping (the mid-term on the left side of Eq. (8)). First derivative of x(t) yields the velocity, namely v(t) = dx(t)/dt = [.5040 sin(1.9843t) + cos(1.9843t)] exp(-t/4) (10) The corresponding graph is shown in Fig. 5. When studying stability of such vibratory systems, it is often useful to eliminate time between equations (9) and (10). This yields a relationship between the coordinate x and velocity v, as illustrated in Fig. 6. This type of diagram is known in Dynamics as “phase diagram”, and it is often very helpful in establishing the range of system parameters for which the system remains stable. Contrary statement is also true: if occurrence of instabilities is detected theoretically, then the unstable and uncontrollable behaviors - or, catastrophes – can be avoided. Such is the power of Calculus. Example of a transition from an orderly motion (stable) to a chaotic one (unstable) is illustrated by the Viewgraphs 1, 2 and 3.the unstable and uncontrollable behaviors - or, catastrophes – can be avoided. Such is the power of Calculus. (11) 18 0.416 0.6 0.5 0.4 0.3 0.2 0.1 X ( t) 0 0.1 0.2 0.3 0.28 0.4 0 1 2 3 4 5 0 6 7 8 9 10 t 10 Figure 4. A decaying wave-form is the solution of the differential equation (8) subject to the initial conditions x(0) = 0 and v(0) = 1. Note that the wave is contained within an exponentially decreasing envelope. 1 1.5 1.25 1 0.75 0.5 V( t) 0.25 0 0.25 0.5 0.75 0.695 1 0 0 1 2 3 4 5 t 6 7 8 9 10 10 Figure 5. Velocity of the vibratory system consistent with the solution of the differential equation (8), shown here as a function of time. 19 1 1.5 1.25 1 0.75 0.5 V( t) 0.25 0 0.25 0.5 0.75 0.695 1 0.4 0.28 0.3 0.2 0.1 0 0.1 0.2 0.3 X ( t) 0.4 0.5 0.6 0.416 Figure 6a. When time is eliminated from Eqs. (9) and (10), the velocity of the moving body can plotted directly as a function of its position. This type of diagram, called a “phase-diagram”, is helpful in the studies of the stability of dynamic systems. Figure 6b. Example of a phase diagram for a pendulum with arbitrarily large angular amplitudes. The system is stable, as seen from the regular shape of the diminishing spiral. 20 To conclude this section, let us modify somewhat the left hand side of Eq. (7) by deleting the term with the first derivative (damping term), and by adding the external force, the so-called the driving force exerted by an external agent, say Fext(t) = exp(-t). Now, we are seeking a solution to the differential equation d2 x t 4 x t exp t dt 2 (11) We may proceed to solve it in two different ways. One involves application of the initial conditions, just like in the case discussed above. Let us choose the initial position and the initial velocity as x(0) = 0 (12) x (0) = 1 x = dx/dt An alternative way to approach solution to a second order differential equation is to specify the values of the function at two distinct points, usually the end points of the chosen time interval. Let us study the motion of our system for 10 seconds, which sets the time interval at 0 t 10, and let us require that the function x(t) satisfies the following boundary conditions x(0) = 1 , x(10) = 0.5 (13) As is seen from Fig. 7, the two solutions look substantially different despite the fact that they have been obtained from the same differential equation, Eq. (11). The corresponding solutions read x1(t) = 0.6sin(2t) – 0.2cos(2t) + 0.2exp(-t) (14) for the initial value problem, and x2(t) = 0.19sin(2t) + 0.8cos(2t) + 0.2exp(-t) (15) for the boundary value problem. The differences between the two solutions can be d v2( t ) x2( t)appreciated by examining Fig. 7. dt 1.005 1.5 1.25 1 0.75 0.5 x1( t) x2( t) 0.25 0 0.25 0.5 0.75 0.821 1 0 0 1 2 3 4 5 t 6 7 8 9 10 10 Figure 7. Two functions are shown x1(t) and x2(t). They resulted as the solutions to the initial value problem and the boundary values problem, respectively. Note that they both satisfy the second order differential equation (8). 21 22 VIEWGRAPH 1 Phase diagram for a dynamic system consisting of a nonlinear pendulum subjected to viscous damping , and governed by the following nonlinear differential equation of the second order: d2/dt2 = -sin- d/dt. The graph is “well-behaved” and there is no indication of any instabilities or chaotic behavior. 23 VIEWGRAPH 2 When the differential equation in the Viewgraph 1 is altered by multiplying the term sin by the time-dependent factor (f sint), in which f denotes intensity of the coupling between the pendulum and an externally applied electromagnetic field, the resulting phase diagrams fall into two distinct categories, those associated with (a) order, and those associated with (b) chaos. This viewgraphs shows the phase diagrams when we deal with chaos, i.e., when the amplitude f is greater than the critical value of 1.87. Yet, in this totally chaotic type of motion, it is possible to find order at a deeper level (as revealed by the existence of an attractor, see the next Viewgraph). 24 VIEWGRAPH 3 The set of points shown here represent 100,000 points within the phase-space, which correspond to successive values of coordinate () and velocity (d/dt) recorded at the end of each successive cycle of a swinging pendulum, coupled with an electromagnetic field. For a particular choice of the damping parameter and the amplitude f, the pendulum “goes crazy”, entering into the chaotic motion, as shown in the previous Viewgraph. Existence of the attractor, though, is indicative of the certain rules that apply to this chaotic motion. Attractor shown here is an example of a Poincare section, which has a fractal dimension of 2.52. 25 In real life things rarely depend on just one variable. There may be two, three, four or a lot more variables. When one considers problems in space-time reference frame (such as designing a trajectory of a spacecraft, for example), one needs four variables for a general case. Then, of course, ordinary differential equations must be replaced by the partial differential equations. In this event, the wealth of possible solutions, which comply with the governing equations and satisfy the prescribed initial or boundary conditions, is awesome. To make things even more intriguing the Nature has kept in store a surprise for all of us who believed in a very regular well-behaved Universe. It turns out that certain dynamical systems (like a system of three bodies interacting with each other via gravitational field) may, under certain conditions, become chaotic and totally unpredictable. Such transition from order to chaos is illustrated for a case of a nonlinear pendulum coupled with an electromagnetic field by the set of Viewgraphs 1, 2 and 3. We can only hope that our spaceships – out there in the deep space – will not encounter field configurations that would cause an onset of such strange chaotic behavior. 3. Calculus Underlying the Orbital Mechanics Newton invented the Calculus and an invention of such a caliber would be considered by many an achievement worth living one’s life. But, the spirit of an experimental scientist has pushed him beyond this discovery. He put his “magic” mathematical tool, the Calculus, to a test of cosmic proportions. He attempted to explain theoretically the existing data on the motion of the celestial bodies, such as planets in the Solar System. How does gravity work? The experimental data suggested that the gravitational pull of Earth, or the gravitational acceleration is inversely proportional to the distance “r” measured between the centers of mass of the two bodies exchanging the pull, say Earth and a satellite (such as the nature made old good Moon). For a so-called central-force problem, in which the acceleration of a point is directed toward a given point, the pertinent relations can be conveniently stated in polar coordinates (r,), as shown in Fig. 8. The symbols e and er, seen in Fig. 8, denote the unit vectors (more about this subject is provided in the next section) – aligned with axes and r, respectively. Using the polar coordinates Newton calculated first the velocity of an object moving in the gravitational field, namely r t t r t dr d er r e t 0 t dt dt v t lim (16) and subjected this expression to the operator d/dt. In this way he was able to calculate the rate of change for the velocity, which represents the acceleration vector 26 Figure 8. Polar coordinates used to describe motion under central force condition. Quantities shown in (a) are used to define the initial conditions, while (b) shows two unit vectors aligned with the radial and transverse axes, er and e. Figure 9. Four different types of the conic section: 1) circle, 2) ellipse, 3) parabola (infinite trajectory), and 4) hyperbola (infinite trajectory). 27 a t d dr d er r e dt dt dt (17) Combining the rules of Calculus with the geometrical considerations, he also knew that de d er dt dt (18) Then, Newton has evaluated the expression (17), reducing it to this rather lengthy formula 2 d 2r d 2 dr d d a t 2 r e e r r 2 2 dt dt dt dt dt (19) For the gravitational field of Earth the acceleration is RE2 g 2 er r (20) in which both constants, g and RE are known; g = 9.81 m/s2, while the radius of Earth RE equals 6370 km. Now, comparing expressions (19) and (20) Newton arrived at two differential equations d 2r gRE2 d r dt 2 r2 dt d 2 dr d r 2 2 0 dt dt dt 2 (21) A system of DE such as this one implies that we are searching for two solutions = (t) and r = r(t). As it turns out these two equations can be reduced to a single second order differential equation, which involves a new function u = u() – defined as the reciprocal of r(), namely d 2u gRE2 u , d 2 r02 v02 u 1 r (22) 28 Note that the entities d/dt and dr/dt are eliminated via these relations d r0 v0u 2 dt dr du r0 v0 dt d (22a) For the interpretation of the initial radius r0 and velocity v0, you may refer to Fig. 8. Now, equation (22) looks almost like the one solved in the preceding section, cf. Eq. (11). In fact, it is a little easier to solve than Eq. (11), because on the right side of it we have just a constant rather than the function exp(-t). The general solution of this equation is u t A sin B cos gRE2 r02 v02 (23) where A and B are constants to be determined from the initial conditions. When = 0, u = 1/r0 (see Fig. 8), and also when = 0, the radial component of velocity dr/dt = 0. This bit of information combined with the second equation in (23) implies du/d = 0. From these two initial conditions, we obtain A 0, B 1 gRE2 1 1 2 2 r0 r0 v0 r0 1 (24) For convenience we have used here the following notation ro2 vo2 1 gRE2 (24a) When these values are substituted into Eq. (23), we arrive at the solution 1 1 1 u cos 1 r0 1 (25) Since u() = 1/r(), it is a simple matter to rewrite Eq. (25) in this final form r r0 1 1 cos (26) 29 Here, the constant = [(r02v02/gRE2) – 1], acquires the meaning of the eccentricity of the satellite orbit, while the orbit itself – as defined by Eq. (26) – represents a conic section, which can be described by one of the three possible choices: - elliptical orbit, 0 1 If “a” and “b” denote the major and minor semi-axes - - of the ellipse, then = a 2 b2 / a . parabolic orbit, = 0, may be thought of as an infinitely elongated ellipse, which does not close into a loop like a regular ellipse, but it is opened at the other end (a ). hyperbolic orbit, for which both and “a” are negative numbers. All three options are shown in Fig. 9. The velocity vector, defined by Eq. (16), remains tangent to the orbit at all times and it can be evaluated by application of the rules of vector algebra, namely dr d v v r 2 dt dt 2 2 (27) in where r(t) and (t) are defined by Eqs. (21), while the angular velocity is given by rv d 20 0 dt r (28) Omitting some algebraic details, we shall provide the final expression for the velocity of an object traveling along the orbit described by Eq. (26), which turns out to be a following function of time and trajectory parameters 1/ 2 1 1 v 2GM r 2a (29) This equation applies to all three types of orbits and it also works for an arbitrary mass M of the large body generating the gravitational field (not necessarily just Earth). The universal gravitational constant G = 6.67422 x10-8 cm3/g.s2, while the length parameter “a” can be related to the period of rotation T (for closed orbits). Specifically, for a circular orbit when “a” denotes the radius of the orbit, the relation reads 30 a3 T 2GM 4 2 (30) Let us illustrate use of formula (30) in evaluating the radius of a geosynchronous orbit (known also as a geostationary, since to an observer on Earth an object placed on this particular orbit appears to be motionless). For such an orbit, of course, the period T must equal 24 hours. When we substitute this T (truly, the exact number for T is 23 hrs 56 min 4 sec), mass of Earth ME and G into Eq. (30), we obtain a 3 23.9344 hrs 2 6.67422 10 -8 cm3g -1s -2 5.97224 1027 g 4 2 74.9597 1027 cm3 Hence ageo = 4.21641x109 cm, or ageo = 42,164.1 km. If the mean equatorial radius of Earth Req = 6378.1 km is subtracted from the number given above, we arrive at the altitude of the geosynchronous satellite, namely, hgs = 35,785.9 km. To conclude this section we shall calculate (1) orbital velocity for a geosynchronous orbit, and (2) escape velocity for Earth. (1) For a circular orbit we substitute r = ageo = const. into Eq. (29), reducing it to GM vorb = a 1/ 2 (31) Since the radius “a” of the geosynchronous orbit is known (see the calculations above), we arrive at the orbital velocity vorb = 3.07 km/s. (2) For the parabolic orbit, which corresponds to a trajectory without an end, the parameter (1/a) equals zero, and then Eq. (29) predicts the so-called escape velocity 1/2 vesc 1/ 2 2GM E 2GM r Earth RE (32) Substituting the mass of Earth ME = 5.97224x1024 kg for M and the radius RE = 6370 km for r in Eq. (29), yields vesc = 11.1870 km/s (33) 31 Figure 10. Example of a perturbation of an elliptical orbit of a planetoid (or a spaceship) circling the Sun caused by an interaction with the Earth gravitational field. This so-called “close encounter” event visibly alters the original orbit, as seen by the segment ABCD of the trajectory depicted in the figure. A “three body problem” has to be considered between points A and D, where an exchange of the mutual forces between three objects (Sun, Earth and the planetoid) must be accounted for. The closed form solution to such a problem is not available. In the Cassini mission this situation occurs each time the spaceship enters the “sphere of influence” of another planet on its path, such as Earth, Venus and Jupiter, which are used to accomplish a gravitational assist maneuver. 32 This velocity is substantially higher that the orbital velocity calculated for the geosynchronous orbit. The ratio of these two velocities equals about 3.64, and it represents one of the universal constants that rule our Universe (for more information about such numbers the reader is referred to “From Pyramids and Fibonacci Sequence to the Laws of Chaos” by Michael Wnuk and Carl Swopes, publ. by AKAPIT, and available from Panslavia Institute of Milwuakee, WI). If the orbital velocity for the geostationary object is compared with the escape velocity calculated for this height (4.3482 km/s), then it turns out that vorb is just about 71% of the escape velocity pertinent to the geostationary orbit. When more than two bodies interact via gravitational pull (see Fig. 10), the mathematical problems become so complex that they cannot be solved in a closed form. The governing partial differential equations in such a case must be integrated numerically, and highspeed computers, which are available to us today, accomplish this feat. Fig. 10 illustrates an example of the so-called “three body problem”, involving a close encounter of a planetoid (or a spacecraft) orbiting around Sun, with our own planet. The case considered here resembles a “gravitational assist” maneuver of some NASA designed spacecrafts. Cursory inspection of Fig. 10 reveals that the trajectory resulting under the conditions of such close encounter event substantially differs from the regular elliptical orbit predicted for the case when only two bodies are interacting with each other. The shape of the trajectory shown in Fig. 10 could not have been obtained without help from a modern computer. Yet, the principles of these calculations are identical to those described by Newton in his “Principia”. Newton’s analytical determination of the elliptic orbits of planets, which had been deduced from observational data gathered by Johannes Kepler (1571 – 1630), was a milestone in the history of natural science. One may add that the design and intricate navigation of the Cassini spaceship is a perfect example of the continuity of Celestial Mechanics that has began several centuries ago, and which had laid the foundation and inspired the present day space exploration programs. 3. Scalars, vectors, quaternions, matrices and tensors All the mathematical entities discussed so far, such as numbers and functions (which connect one set of numbers with another) are examples of scalars, or scalar fields. For example, if one wishes to describe the distribution of temperature in one’s living room as a function of location (x,y,z) and time t, say F = F(x,y,z,t) (34) Then for every point (x,y,z) within the room and at a specified time t, the function F determines a single property: the temperature. This single property is an example of a scalar – or, like in the case discussed here, where the distribution of temperature is considered – we refer to it as a scalar field. 33 z YAW k i O P’ j PITCH P x ROLL y Figure 11. Cartesian coordinate system (x, y, z) with the corresponding unit vectors (i, j, k). A vector PP’ can be represented by its components [PP’x , PP’y , PP’z], or by this equation: PP’ = (PP’x)i + (PP’y)j + (PP’z)k. If plane (x, y) is chosen as the plane in which Earth circles the Sun, the (x, y, z) coordinates shown here represent J2000 inertial reference frame. Unit vector and the rotation are used to define a quaternion. 34 The picture gets considerably more complicated when we ask a question about the distribution of the velocities of the dust particles in the same room. Now, the single number is not sufficient to provide a complete information about the velocity. Velocity is a vector, and in 3D space a vector can be represented by a set of three ordered numbers, for example v 1.5i 2 j 1.75k m / sec (35) 1.5 v 2 m/sec 1.75 (36) or, in form of a column vector To interpret these numbers correctly, one should envision a particle traveling in the negative x-direction (backwards) with a speed of 1.5 m/sec, while the other two components of the vector v, 2m/sec and 1.75m/sec, inform us how fast is the particle moving in the y and z directions, respectively. Only after all these three numbers are provided, we are able to reconstruct the complete velocity vector v. Using a somewhat different terminology, we can describe a vector by a pointed arrow, see Fig. 11, which possesses three properties: - orientation (a line in space), - sense (direction of the arrow), and - magnitude (length of the arrow). From the high school Math, the length, or the magnitude, of a vector can be calculated from this simple formula v v PP PP PP ' 2 x ' 2 y ' 2 z (37) For the example used in Eqs. (35) and (36), we obtain v 1.5 2 1.75 2 2 2 3.0516 m / sec (38) Now, consider a spacecraft moving through the 3D space. Its velocity, of course, is a vector. On August 18, 1999, when the Cassini had a “close encounter” with Earth during the gravitational assist maneuver, its velocity was v 18.0176i 5.32693 j 2.99920k km / s v v 18.0176 5.32693 2.9992 2 2 2 19.03km/s (39) 35 Measured in terms of the escape velocity, which is a convenient yard-stick for measuring velocities of cosmic nature, the velocity of Cassini given by Eq. (39) exceeded the escape velocity pertinent to this altitude by 85%. The general case of the motion of a spaceship can be thought of as a superposition of - three translations, each occurring along one of the reference axes, x,y,z, as shown in Fig. 11, and - three rotations, usually defined by the Euler angles. Therefore, we need a total of six equations of motion, three for the translations and three for the rotations. Mathematical representation of the translational motion is relatively simple. If we adapt the notation x, y and z for the components of the acceleration vector x a y z Then the Newtonian equations of motion read mx Fx my Fy (40) mz Fz in which m is a scalar and it denotes the total mass of the moving object, while the set of functions ( x, y, z ) represents the acceleration vector, and the force field is described by yet another vector Fx F Fy F z (41) To define the three rotations shown in Fig. 11, we use the traditional aviation terminology, namely pitch – rotation about the x-axis, x roll – rotation about the y-axis, y 36 yaw – rotation about the z-axis, z. Here we have assumed that the spacecraft (or, an aircraft) is moving in the direction aligned with y, and its nose is located at the origin of the coordinate system shown in Fig. 11. The three angles, listed above, are known as the Euler angles, and are commonly used in the Dynamics of 3D solid bodies. Equations that relate these rotations to the applied moments, or better, a moment vector Mx M My M z (42) are again dictated by the Newtonian mechanics, and they read I11 I12 I13 x M x I I I M 21 22 23 y y I I I 31 32 33 z M z (43) Two dots placed over the Euler angles signify the second time derivative, or angular acceleration, which – again – is a vector x x d2 a 2 y y dt z z (44) Note that in “short-hand” notation Eq. (43) can be written as follows I M (45) Here, the quantity I is the 3 by 3 matrix of moments of inertia, which measures body inertial resistance to a rotation. In fact, due to the special rules of transformations, with 37 which I complies when transformed from one reference frame to another, it is also a tensor. Since the moment of inertia matrix (or, tensor) is a symmetric matrix, out of 9 of its components only 6 are independent. To be a little more specific, let us take a closer look at the Cassini’s tensor of moment of inertia I cassini 9362 129 117 129 9652 52 kg m 2 117 52 3982 (46) These numbers resulted from the specific distribution of mass of the Cassini spacecraft (see the cover page of this report). The tensor I can be reduced to the diagonal form I dia 0 9314 0 0 9703 0 kg m 2 0 0 3978 (47) where the non-zero diagonal elements designate the principal values (largest, intermediate and smallest) of the moment of inertia for the Cassini spaceship. They were obtained by a rather tedious process of seeking the eigenvalues for the matrix (46). The “bottom line” of this process consists in expanding the determinant I11 , I12 , I13 I 21 , I 22 , I 23 I 31 , I 32 , I 33 0 (48) and then solving the resulting cubic equation 3 1 2 2 3 0 (49) The so-called invariants 1, 2 and 3 are computed from the known components of the matrix as follows 38 1 I11 I 22 I 33 2 I11 I 22 I 22 I 33 I 33 I11 I122 I 232 I 312 (50) 3 I11 I 22 I 33 I12 I 23 I 31 I11 I 232 I 22 I132 I 33 I122 For the Cassini spacecraft, using the data contained in Eq. (46),we obtain 1 22,995 kg m 2 2 166, 023, 724 kg 2 m 4 (51) 3 3.59511011 kg 3 m 6 When these numbers are substituted into the cubic equation (49), and then the equation is solved, we arrive at the three real roots, shown in the diagonal of the expression (47). These diagonal components of the matrix determine the moments of inertia about the three principle axes of the spaceship. The fact that we did indeed find the three real roots means that the matrix is “positive definite”, as expected, and that our problem of seeking the eigenvalues and eigenvectors, is “well posed” as a mathematician would say. On a more engineering side we can judge how the spaceship is “balanced” with respect to its center of mass; the first two numbers shown on the diagonal in matrix (47) are quite similar (which is good), while the third one indicates moment of inertia with respect to the third major axis that almost coincides with the ship vertical axis, cf. the figure on the cover page. This means that the ship will easily roll, while it is more resistant to pitch and yaw. As it can be appreciated from these considerations, using the matrix I and the Euler angles gets rather complex and tedious. It is possible, though, to replace this formalism by another representation involving just one vector of unit length, , and just one rotation marked by in Fig. 11. To represent a vector in 3D we need a set of three numbers, and to represent an angle we need one scalar. Therefore, total of four pieces of information are necessary to describe the attitude (orientation) of the spaceship on its orbit. In this way the matrix algebra is avoided altogether. What we get instead is an ordered set of four numbers, the so-called quaternion, which incorporates the orientation in space (vector ) and the angle of rotation, . Cassini’s attitude quaternion on its present orbit reads q̂= -0.5421 -0.3389i -0.1594j -0.0146k (52) A “hat” is used to distinguish a quaternion from a vector v and/or a tensor I . The first number shown on the right side of Eq. (52) provides an information about the rotation (yes, the ship rotates as it travels along its orbit), while the other three numbers define the orientation of the unit vector . They are related to the directional cosines of the vector, 1, 2, 3 and 4 as follows: 39 q1 = cos(/2) q2 = 1sin(/2) q3 = 2sin(/2) q4 = 3sin(/2) (53) When all these quantities are put together, we recover a quaternion q̂= q1 , q 2 , q3 , q 4 (54) For any unit vector, of course, the sum 12 22 32 equals 1. And the directional cosines are cosines of the angles formed between the vector and the corresponding coordinate, i = cos(xi,). Here, for simplicity the index “i” has been applied to number the axes, so that instead x, y and z, we have x1, x2 and x3. The most common choice of the reference frame (x1, x2, x3) is the J-2000 inertial frame attached to Earth in such a way that the x3 axis (or, z axis in Fig. 11) is slanted at 23o from the polar axis of the planet. The tilt is necessary to align the reference coordinates with the ecliptic plane to which our planet is confined in its motion around Sun. As the z-axis of the J2000 frame is perpendicular to the ecliptic plane, while the polar axis of Earth is not, one needs to account for the 23o angle between the two axes. We conclude this section with a brief overview of the characteristic parameters (all scalars, of course) describing three planets: Venus, Earth and Saturn. For details see Table 3. Suggested Reading 1. John A. Wood, 1979, “The Solar System”, publ. by Prentice-Hall, New Jersey. 2. Anthony Bedford and Wallace Fowler, 1995, “Engineering Mechanics – Dynamics”, publ. by Addison-Wesley, USA. 3. David A. Vallado and Wayne D. McClain, 1997, “Fundamentals of Astrodynamics and Applications”, in Space Technology Series, publ. by McGraw-Hill, USA. 4. Michael P. Wnuk and Carl Swopes, 1999, “From Pyramids and Fibonacci Sequence to the Laws of Chaos”, publ. by Akapit Publishers, Krakow, Poland. 5. Levin Santos, 2000, “Weighing the Earth. Physicists Close in on Newton’s Big G” in the “Sciences”, July/August 2000, publ. by New York Academy of Sciences, p.11. 40 TABLE 3 Characteristic Parameters of Three Planets 41 Mass Relative to Mass of Earth (a) Average Distance From Sun in AU (b) Eccentrici ty of the Orbit Period (in Earth years) of Motion Around Sun Average Orbital Speed (KMS –1) Escape Velocity From the Planet (KMS –1) Period of Rotation About Polar Axis (hrs) Venus 0.816 0.723 0.007 0.615 35.0 10.4 5.832 (c) Earth 1 1 0.017 1 29.8 11.2 24 Saturn 95.2 9.54 0.056 29.46 9.6 36.2 10.3 PLANET COMMENTS (a) Mass of Earth ME = 5.97224 x 10 24 kg (b) AU = Astronomical Unit = Average Distance of Earth from Sun (1AU) = 1.496 x 10 8 km (c) Venus has so-called “negative” rotation. This means that when the planet is viewed along the polar axis from the North, it rotates clockwise. 42 43 About the Author Dr. Michael P. Wnuk University of Wisconsin - Milwaukee Professor Michael P. Wnuk teaches Engineering Mechanics at the University of Wisconsin-Milwaukee. He has taught and performed research at various schools in the United States, including Caltech and Northwestern. Dr. Wnuk has also worked abroad in England, Poland (his native country), Germany, Russia, Italy, Yugoslavia, and China. In 1970 he worked as a Distinguished Visiting Scholar in the Department of Applied Mathematics and Theoretical Physics at the University of Cambridge, UK. His research has been sponsored by the British Science Council, NATO, NASA, the National Science Foundation, Office of Naval Research, the National Academy of Sciences and the National Institute of Standards and Technology. In 1991, he was appointed a Fulbright Scholar, and in 1992, he received the Lady Davies Scholarship from the government of Israel. He is a member of the Sigma Xi Research Society, an Associate Member of Cambridge Philosophical Society in England, member of the American Academy of Mechanics, and a life member of the New York Academy of Sciences. Dr. Wnuk is one of the co-founders and a co-chairman of the International Conference and Research Workshops on Mesomechanics which convenes every two years (in 1996, Tomsk, Siberia, in 1998, Tel Aviv, in 2000 - China, and in 2002 in Germany) in order to merge interdisciplinary research of high-tech nature involving Physics, Mechanics and Materials Science. He has been selected an ASEE/NASA Summer Faculty more than once, in 1996 at the Johnson Space Center - NASA White Sands Test Facility in New Mexico and at California Institute of Technology/Jet Propulsion Laboratory in Pasadena, CA in 1998, 1999 and 2000. Since 1987 Dr. Wnuk serves as President of "Panslavia- International Research Institute, Inc." which assists multinational partners in trade, science and technology transfer with particular emphasis on global problems of ecology and medical R&D. 44