Template matching for feature-based tumor tracking
advertisement

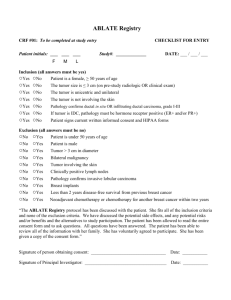
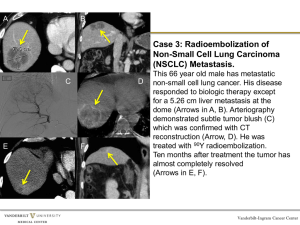
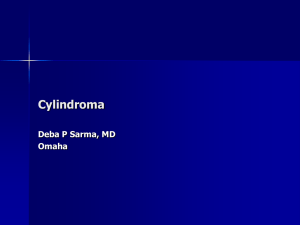
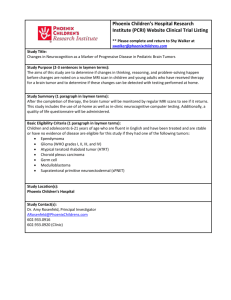
Tumor Tracking in the Absence of Radiopaque Markers Ross I. Berbeco1, Hassan Mostafavi2, Gregory C. Sharp1, Steve B. Jiang1 1 Department of Radiation Oncology, Massachusetts General Hospital and Harvard Medical School, Boston, MA, USA Ginzton Technology Center, Varian Medical Systems, Inc., Palo Alto, CA USA 2 Abstract Due to a risk of pneumothorax, physicians are reluctant to implant radiopaque markers within patients’ lungs for the purpose of radiographic or fluoroscopic tumor localization. It is, therefore, necessary to develop methods to find the positional information directly, without surrogate markers. We have explored several algorithms for separating tumor motion from the stationary anatomy. The motion, itself, is exploited to reveal the tumor’s positional information. We show that the tumor motion may be tracked in the absence of radiopaque markers, for specific cases. More robust methods, coupled with better data, may be needed for a universal algorithm. Keywords Radiotherapy, tumor tracking, image guidance, IRIS Introduction A large concern in radiation oncology is the localization of the tumor during radiation treatment [1-6]. This becomes especially important when treating tumors located in a patient’s abdomen or thorax, because of respiratory motion. Several image guidance techniques have been proposed to deal with this issue [7-14]. At our institution, we are building an Integrated Radiotherapy Imaging System (IRIS) consisting of orthogonal kV x-ray sources and flat panel detectors, all mounted on a Varian Clinac 21EX gantry (VMS) [7]. Our midterm goal is to use this system to perform gated treatment and our long-term goal is real-time adaptive radiotherapy. difficult to delineate the edges in some anatomical locations. To overcome this, a common practice is the surgical placement of one or more radiopaque markers in or near the tumor prior to treatment. These markers, which are visible in kV x-ray images, act as a reliable surrogate for tumor location [15-17]. However, there may be cases for which physicians are reluctant to implant markers. For example, there is a concern that the current technique for marker implantation in the lung has an unacceptable risk of causing pneumothorax in the patient [18-22]. For these cases, it would be in the patient’s best interest to image the tumor directly, without markers. Tumor density is very close to tissue density, making it The interior of a patient’s lungs, being mostly air, acts a Inside Outside Figure 1a: A lateral view of a patient with a liver tumor. Radiopaque markers have been surgically implanted near the tumor. The white box represents a region of interest within the patient. The black box represents a region of interest outside the patient. Figure 1b: An anterior-posterior view of a patient with a lung tumor. The tumor is visible within the white-dotted region of interest. good contrast to tumors. In many cases, lung tumors can be located without the aid of radiopaque markers. To illustrate this point, figure 1a shows a lateral kV x-ray image of a patient with a liver tumor. The tumor shape (within the white dotted box) is indiscernible from the surrounding healthy tissue. Only the markers (in the upper left corner of the box) show where the tumor is. Figure 1b shows an anteriorposterior image of a different patient with a visible lung tumor. No markers are needed to visually locate the tumor mass in this image. We have investigated several different approaches for detecting motion in fluoroscopic images and locating lung tumors without the prior implantation of radiopaque markers. Our work shows the feasibility of building an algorithm for automatically tracking lung tumors with kV xrays. This work will be further improved by the use of IRIS as well as the integration of other intelligence from an RPM system and/or a prior CT scan. Materials and Methods Motion induced intensity fluctuations The patient in figure 1a underwent a fluoroscopic simulation session in our clinic prior to radiation treatment. A C series Ximatron was used to acquire images at 30 frames/sec. The patient has a liver tumor that cannot be seen in the image shown. However, as the patient breathes, the relative image intensity in the region of the tumor may change due to organ motion and deformation. The white box shows the region of interest inside the patient within which the tumor is moving. The image shown was chosen at inhale to show that the diaphragm does not enter the region of interest at any point during the breathing cycle. In our clinic, we use the automatic brightness control (ABC) feature to partially account for global intensity changes. To show that the intensity change inside the region of interest is not due to the ABC, we also tracked the intensity change in a region outside the patient. Figure 2 shows the relative average intensity values for the pixels within the regions of interest inside and outside of the patient. The oscillatory pattern inside the patient matches the patient’s breathing pattern. This shows that there is information about the internal motion that can be extracted from fluoroscopic images even if the tissue densities are very similar. This could be used as a basis for creating a signal that serves as a surrogate for sensing the tumor motion. Although this algorithm could not be used for detecting tumor location directly, it demonstrates the principle that motion information can be obtained from fluoroscopic data in which a tumor is not visible without the aid of radiopaque markers. More advanced methods (like the ones presented in this paper) are needed to determine tumor locality. Motion enhancement and detection for tumor gating, tracking and position monitoring The feasibility of using motion enhancement techniques to highlight moving organs and find the associated tumor position has been studied. Moving and stationary features in fluoroscopic images can be contrasted using several breathing cycles. Real-time fluoroscopic images can than be produced in which features are enhanced or suppressed depending on their motion characteristics. Respiratory synchronized fluoroscopy is acquired using Varian’s RPM Respiratory Gating System. This allows phase-based registration of the fluoroscopic sequence with a 4D treatment plan[23]. Frame averaging is used to form a sequence in which each frame is the long-term average of the frames up to that point. By subtracting this averaged image from the current input frame, the moving structures are enhanced in the current image while the contrast of the stationary features is suppressed. Using this method, a reference set of motion-enhanced image templates is prepared for many phases of the breathing cycle. The target contour for each phase of the breathing cycle, as defined by the 4D treatment plan, is projected onto the corresponding Relative Intensity Intensity fluctuation as a function of time 1.2 Inside the patient 1.1 1.0 0.9 Outside the patient 0.8 0 100 200 300 400 500 f rame (30 f rames = 1sec) Figure 2. The change of average image intensity of a region of interest inside and outside the patient, as a function of time. (a) (c) (b) Figure 3. The original (a) and motion-enhanced (b) fluoroscopic frames of a lung patient, and the template (c) with the best match to the area shown by the overlay box in (b). Lat Position- Pixels Results and Discussion Max Correlation 450 1 400 0.9 350 0.7 300 Pixels 0.6 250 0.5 200 0.4 150 0.3 100 Max Correlation Value 0.8 0.2 50 0.1 0 0 1 8 15 22 29 36 43 50 57 64 71 78 85 92 99 Frame No. Figure 4. An example of tracking results using a sequence of templates. In addition to the pixel coordinates, the maximum correlation value for template matching is also shown. frame of the simulation fluoroscopy. This is then used to select the target region of interest (ROI) that comprises the reference template for that frame. During the treatment delivery, the real-time fluoroscopic images are enhanced, separating the moving tissues from stationary structures, and then temporally and spatially registered with similarly processed candidate reference sequences. The reference template resulting in the best spatial match, based on cross correlation template matching, defines the position of the target ROI. Figure 3 shows the input and motion-enhanced fluoroscopic frames of a lung patient. Figure 3c shows the template with the best match to the area shown by the overlay box in Figure 3b. Figure 4 shows the tracking results using images taken at 10 frames/sec. This motion enhancement and template-matching algorithm can be used as a position monitoring system for both gating and tracking. Template matching for feature-based tumor tracking In the images of the patient shown in figure 1b, the tumor mass can be seen even in the static image. As the patient breathes, the tumor can be seen to move in a mostly cranialcaudal direction. Given the relatively distinct shape of this tumor and the adjacent anatomy, template matching may be performed on the fluoroscopic images. A sample image is used to define the region of interest within which the tumor will be moving and to select the template. The region of interest in this and all subsequent images is normalized to zero mean in order to have consistency among the data set. The position of the template is described by its center-ofmass. For each frame, a simple convolution algorithm, using the template as the convolution kernel, is applied to find the best template match. The coordinates of the best match are output and recorded. The recorded trace of the motion is shown in figure 5. This breathing pattern fits the visually available pattern in the fluoroscopic images. We have shown that although tumors may not be immediately visible in static lung radiographs, valuable information may be gleaned from a fluoroscopic sequence of image frames. The motion, for which we would like to compensate, is the key to marker-less tumor tracking. Our results show that it is feasible to isolate a moving tumor from the rest of the anatomy by using a motion detection algorithm. The motion enhancement method presented uses the past history of the data set to suppress static anatomy while enhancing objects that are in motion. Phase-based template matching is then performed to find the location of the desired object. The results, shown in figure 4, show a periodic motion of the tumor consistent with respiration. Unfortunately, the maximum correlation value tends to fall off just after periods of lowest target motion. Methods of prediction [24, 25] may help to improve this. The feature-based template-matching algorithm presented here is successful in tracking a lung tumor with distinctive features. The case presented here shows the feasibility of direct tumor tracking. It should be pointed out that to have such an obvious mass is not always the case. For many, perhaps even for most, patients, this technique will be unable to effectively track the tumor. Further advancements and the inclusion of information from other technologies may bolster this technique and allow it to have more general relevance. Conclusions Valuable information about lung tumor motion can be extracted from fluoroscopic images in the absence of implanted radiopaque markers. Although the methods presented here are not yet robust enough for clinical implementation, we believe that subsequent improvements may allow us to reliably track lung tumors without the aid of implanted radiopaque markers. To perform this task in three dimensions, which would be required for use during treatment, a stereoscopic imaging system like the IRIS must be used [7]. By combining all of the information available from 4DCT[23], RPM, fluoroscopic simulation, and orthogonal on-board imaging, we may be able to discern the S-I tumor motion as a function of time 12.5 Distance (cm) SI position - Pixels 12.0 11.5 11.0 10.5 10.0 0.0 2.0 4.0 6.0 8.0 10.0 Time (seconds) Figure 5. The superior-inferior tumor motion, relative to an arbitrary fixed point. The position at each time was determined by the template-matching method. tumor location throughout the imaging session. Once tracking has been established, the treatment can be adapted to its location by either gating the treatment beam or taking the motion into account in the MLC leaf sequencing [13]. This presents a clear path towards marker-less 4D radiotherapy for lung tumors. 14. 15. References 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. Langen, K.M. and D.T. Jones, Organ motion and its management. Int J Radiat Oncol Biol Phys, 2001. 50(1): p. 265-78. Weiss, P.H., J.M. Baker, and E.J. Potchen, Assessment of hepatic respiratory excursion. J Nucl Med, 1972. 13(10): p. 758-9. Suramo, I., M. Paivansalo, and V. Myllyla, Craniocaudal movements of the liver, pancreas and kidneys in respiration. Acta Radiol Diagn (Stockh), 1984. 25(2): p. 129-31. Davies, S.C., et al., Ultrasound quantitation of respiratory organ motion in the upper abdomen. Br J Radiol, 1994. 67(803): p. 1096-102. Balter, J.M., et al., Uncertainties in CT-based radiation therapy treatment planning associated with patient breathing. Int J Radiat Oncol Biol Phys, 1996. 36(1): p. 167-74. Shimizu, S., et al., Three-dimensional movement of a liver tumor detected by high-speed magnetic resonance imaging. Radiother Oncol, 1999. 50(3): p. 367-70. Berbeco, R., et al., Integrated radiotherapy imaging system (IRIS): design considerations of tumour tracking with linac gantry-mounted diagnostic x-ray systems and flat-panel detectors. Phys Med Biol, 2004. 49(2): p. 243-255. Mackie, T.R., et al., Image Guidance for precise conformal radiotherapy. Int J Radiat Oncol Biol Phys, 2003. 56(1): p. 89-105. Murphy, M.J., et al., The effectiveness of breathholding to stabilize lung and pancreas tumors during radiosurgery. Int J Radiat Oncol Biol Phys, 2002. 53(2): p. 475-82. Jaffray DA, et al., Flat-panel cone-beam computed tomography for image-guided radiation therapy. International Journal of Radiation Oncology, Biology, and Physics, 2002. 53(5): p. 1337-49. Shirato, H., et al., Physical aspects of a real-time tumor-tracking system for gated radiotherapy. Int J Radiat Oncol Biol Phys, 2000. 48(4): p. 1187-95. Kubo, H.D. and B.C. Hill, Respiration gated radiotherapy treatment: a technical study. Phys Med Biol, 1996. 41(1): p. 83-91. Neicu, T., et al., Synchronized moving aperture radiation therapy (SMART): average tumour 16. 17. 18. 19. 20. 21. 22. 23. 24. 25. trajectory for lung patients. Phys Med Biol, 2003. 48(5): p. 587-98. Ford, E.C., et al., Evaluation of respiratory movement during gated radiotherapy using film and electronic portal imaging. International Journal of Radiation Oncology*Biology*Physics, 2002. 52(2): p. 522-531. Gierga, D., et al., Correlation between external and internal markers for abdominal tumors: implications for respiratory gating. Int J Radiat Oncol Biol Phys, 2003. 57(2 Suppl): p. S186-7. Kitamura, K., et al., Registration accuracy and possible migration of internal fiducial gold marker implanted in prostate and liver treated with realtime tumor-tracking radiation therapy (RTRT). Radiother Oncol, 2002. 62(3): p. 275-81. Shirato, H., et al., Feasibility of insertion/implantation of 2.0-mm-diameter gold internal fiducial markers for precise setup and realtime tumor tracking in radiotherapy. Int J Radiat Oncol Biol Phys, 2003. 56(1): p. 240-7. Topal, U. and B. Ediz, Transthoracic needle biopsy: factors effecting risk of pneumothorax. Eur J Radiol, 2003. 48(3): p. 263-7. Geraghty, P.R., et al., CT-guided transthoracic needle aspiration biopsy of pulmonary nodules: needle size and pneumothorax rate. Radiology, 2003. 229(2): p. 475-81. Arslan, S., et al., CT- guided transthoracic fine needle aspiration of pulmonary lesions: accuracy and complications in 294 patients. Med Sci Monit, 2002. 8(7): p. CR493-7. Laurent, F., et al., Percutaneous CT-guided biopsy of the lung: comparison between aspiration and automated cutting needles using a coaxial technique. Cardiovasc Intervent Radiol, 2000. 23(4): p. 266-72. Laurent, F., et al., CT-guided transthoracic needle biopsy of pulmonary nodules smaller than 20 mm: results with an automated 20-gauge coaxial cutting needle. Clin Radiol, 2000. 55(4): p. 281-7. Rietzel, E., et al., 4D computed tomography for treatment planning. Int J Radiat Oncol Biol Phys, 2003. 57(2 Suppl): p. S232-3. Sharp, G., et al., Prediction of respiratory tumour motion for real-time image guided radiotherapy. Phys Med Biol. Murphy, M.J., J. Jalden, and M. Isaksson, Adaptive filtering to predict lung tumor breathing motion during image-guided radiation therapy. Proc. 16th Int. Conf. on Computer Assisted Radiology (CARS 2002) (June 2002) ed H U Lemke, K Inamura, M W Vannier, A G Farman and K Doi, 2002.