Supplementary information
advertisement

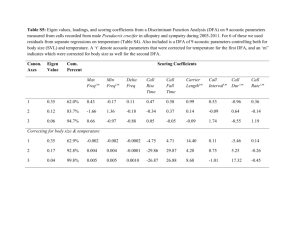
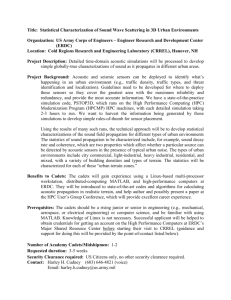
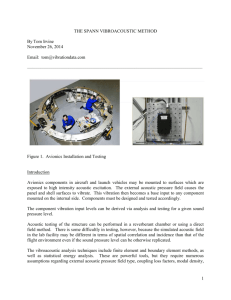
Supplementary information (a) (b) Figure I: Experimental verification of biofouling elimination in SAW device through acoustic streaming in LiNbO3. (a) Before SAW induced acoustic streaming. The foreground consists of 40 μm squares of antimouse IgG labeled with Alexa-488 (green). The background is fouled with excess mouse IgG labeled with Alexa-594 (red). (b) After 6 mins of acoustic cleaning, the foreground region retains bound anti-mouse IgG (green). Of significance, the background is now free of most excess mouse protein (red). More details can be found in reference [1]. In this work, we show that prominent surface normal acoustic modes can be generated in the (0, 22, 0) direction of LGS with induced acoustic streaming force (0.95 x 10 8 N/m2) almost comparable to that induced in (0, 38, 0) LiNbO3 (1.29 x 108 N/m2). Figure II: Meshed fluid-structure interaction model of the SAW device with fluid loading. High mesh densities were ensured near the device surface to capture the dynamics at the surface which undergoes highest deformation. The FSI model shown here contained millions of nodes and elements: 2, 217, 889 nodes and 2, 085, 525 elements were generated. 12 Sensitivity (Hz-cm 2 /ng) 10 8 6 4 2 0 36° YX LiTaO 3 LGS Figure III: Comparison of sensitivities for the Langasite substrate for propagation along the (0, 22, 90) Euler direction and a comparable 36° YX LiTaO3 substrate. FE models were created for 100 pg mass applied over an area of 9600 μm2 in the delay path of the SAW device based on Langasite. Transient analysis was utilized to study transmission characteristics of this ideal mass perturbed sensor. The sensitivity obtained for the LGS SAW device in the current study is compared with that for the 36° YX LiTaO3 device obtained by Cular et al. (2008), using the same approach as outlined2. The sensitivity for the 100 MHz 36° YX LiTaO3 device is scaled to match the centre frequency (68 MHz) of LGS. Table 1: Comparison of non-specific adhesive and removal forces for particles on a 70 MHz SAW device based on Langasite for propagation along the off axis (0, 22, 0) direction. The calculated forces are based on the fluid velocity fields generated near the device surface close to the IDTs. The particle diameter R is varied from 0.1 μm to 10 μm and typical displacement amplitude of 2.5 nm is used. Particle radius R (μm) Forces (N) 0.1 1 10 Fvdw -4.2 x 10-9 -4.2 x 10-8 -4.2 x 10-7 FSAW 3.3 x 10-7 3.3 x 10-5 3.3 x 10-3 FL 1.0 x 10-17 1.0 x 10-15 1.0 x 10-13 FST 1.8 x 10-13 1.8 x 10-12 1.8 x 10-11 References: 1 2 S. Cular, D. W. Branch, V. R. Bhethanabotla, G. D. Meyer, and H. G. Craighead, IEEE Sensors Journal 8, 314 ( 2008). S. Cular, S. K. R. S. Sankaranarayanan, and V. R. Bhethanabotla, Applied Physics Letters 92, 244104/1 (2008).