sec2_3
advertisement

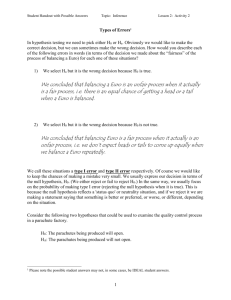
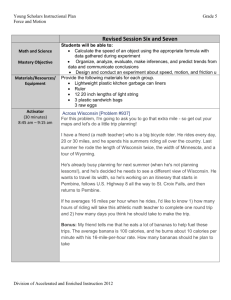
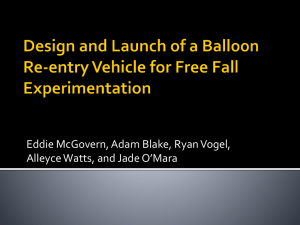
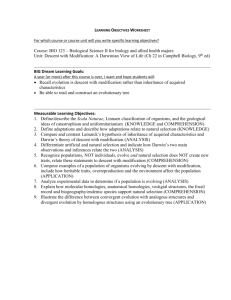
2.3 Descent Stage Jeremy Davis Nomenclature HAB = Habitation Module ERV = Earth Return Vehicle CTV = Crew Transfer Vehicle G = Force due to Earth Gravity of 9.81 m/s2 LRE = Liquid Rocket Engine h = Acceleration of spacecraft towards Mars during descent T = Thrust provided by the LRE during descent mo = Initial mass of spacecraft prior to LRE burn = Propellant mass flow of the LRE during descent m t = time gm = Acceleration due to Martian gravity (~ 3/8 G) FAI/IPC = Fédération Aéronautique Internationale / International Parachuting Commission 2.3.1 Descent Stage In this section, we address the problem of decelerating the spacecraft from their post-entry velocities (of ~ Mach 3) to their final touchdowns at the destination planet. The analysis is presented in chronological order, beginning with the ERV descent to Mars and ending with the CTV's Earth entry. 2.3.1.1 ERV Descent Before analyzing the problem of the ERV entry it is necessary to first look at the constraints. The ERV being launched first and carrying no humans makes the constraints less critical than those of the HAB. However, the nature of the landing is more complicated than that of the HAB. Because the ERV does not contain the crew, the constraints are geared more towards mission-critical systems unlike the HAB entry, which will be centered on life-critical systems. 2-3-1 Constraints The vehicle must not be subjected to more than 7 G’s for more than 20 seconds. The velocity of the ERV at touchdown must be less than 1.0 m/s. The ERV must have enough fuel for 20 seconds of hovering. The third constraint is slightly trivial to the analysis because the appropriate amount of propellant can just be added to the final results to allow for the hover. It is our goal to optimize certain variables while working around these constraints. Variables of Interest The mass of the propellant. The mass of the parachutes. The risk of life-critical and mission-critical failures during the descent, which will be assessed in Sec. 2.3.1.4. With all the constraints and variables of interest in mind, the analysis was completed for the HAB and the following results were obtained. When the vehicle reaches Mach 1, the descent stage begins and five subsonic ringsail parachutes, each 49m in diameter are deployed. At the moment of the subsonic chute deployment, bolts connecting the ERV and the garage (which contains the rover) are cut. The snatch force from the chute deployment pulls the two craft apart and the garage quickly separates itself from the ERV. Soon after the separation, three ringsail parachutes, also 49m in diameter deploy from the garage and large balloons inflate from the craft to prepare it for landing. Because the ERV chutes are deployed first, but the ERV weighs much more than the garage, the ERV overtakes the garage soon after the parachute deployments. This, however, does not mean that the two spacecraft collide. Because they separate while still traveling at about 236 m/s, their longitudinal positions are slightly different; enough so that a collision is virtually impossible. At approximately 1.47km above the surface, the subsonic parachutes of the ERV are cut and the retro rockets are fired, providing a constant thrust of 330kN. Over the course of the trajectory, the engine consumes 4.62 tonnes of propellant to set the ERV onto the surface at a velocity of 0.385 m/s. The garage however, hits the surface of Mars at 21 m/s. Normally this would be a jarring landing that would be catastrophic to the garage 2-3-2 and rover, but the balloons located around the garage dissipates the energy and causes minimal loading on the garage during the landing. Figure 2.3.1 shows the altitude history of this complicated descent. The solid line represents the ERV and the dashed line represents its garage. Figure 2.3.1 ERV Mars Descent - Altitude History [J. Davis] Figure 2.3.2 shows the velocity history during descent of both the ERV and the garage. Notice that the ERV has a much steeper velocity gradient than the garage. This can be seen as an effect of the ratio of the parachute size to the vehicle weight. If the parachute size to vehicle weight is relatively small, the parachutes will have a large terminal velocity and small snatch force. If the ratio is relatively great, the parachutes will have a small terminal velocity (which is a design goal for the garage) and a large snatch force. Because we are designing the garage descent system to have as a small terminal velocity as possible, we are forced to deal with a large snatch force. In the case of the garage, the number of parachutes being used (three) is the greatest that can be used without causing a snatch force too great for the structure to withstand. 2-3-3 Figure 2.3.2 ERV Mars Descent - Velocity History [J. Davis] Throughout the ERV descent, the G-forces incurred by the ERV and garage are brief impulses of 8 and 12 G's respectively. Figure 2.3.3 shows the mass breakdown for the descent stage of the ERV and garage landings. 2-3-4 ERV Descent Stage Weight Breakdown 357.7 594.4665 Subsonic Parachute Mass [kg] Retro-Rocket Propellant Mass [kg] Garage Parachutes [kg] 4.62E+03 Figure 2.3.3 Mass Breakdown of ERV Stage 2.3.1.2 HAB Descent Upon entry, the HAB encounters a velocity of Mach 3 at an altitude of approximately 17.5 km. At this point, three supersonic conical ribbon parachutes, each 30m in diameter, are deployed. Upon deployment, the crew will experience a peak of 5 G’s, which exponentially decays to about 1 G over a 20 second period. 42 seconds into the descent stage, the HAB reaches Mach 1. At that time, the risers of the supersonic parachutes are cut and five subsonic, ringsail parachutes, each with a diameter of 49m, are deployed. As with the supersonic deployment, there is a snatch force that imposes 5 G's on the crew. That snatch force imposes an average g-load of approximately 3 G’s for a period of 10 seconds. The subsonic parachute deployment decelerates the HAB from 236 m/s to a terminal velocity of about 63 m/s, which takes about 57 seconds to complete. When terminal velocity is reached, which is at an altitude of about 1.2km, the subsonic chutes are cut and the retro liquid rocket engine (LRE) is fired. Over a time span of almost 35 seconds, the LRE uses a constant thrust of 335.2 kN and 3.85 tonnes of propellant to lower the HAB to the surface with a touchdown velocity of 0.89 m/s. 2-3-5 Retro-Rocket Analysis Method In order to simplify the problem, a constant thrust, and therefore constant propellant mass flow is assumed. Using Newton’s 2nd Law, we find an EOM for the descending rocket system, shown below. h T gm m0 m t (2.3.1) By integrating the EOM, an analytical solution was found (see the Appendix for details solution) and implemented into the code to solve for the trajectory. Figure 2.3.4 shows an altitude history of the trajectory described above. Figure 2.3.4 HAB Mars Descent - Altitude History [J. Davis] From the above figure, the three stages of the descent are obvious. Each stage reduces the slope of the trajectory by an amount enough to significantly reduce the velocity at touchdown without increasing the g-loading beyond what our constraints require. Figure 2.3.5 below shows the velocity history of the HAB descent. This shows more clearly how each stage contributes to setting the large spacecraft on the surface of Mars. Figure 2.3.6 shows the g-load history during the descent. Note that the largest 2-3-6 contributor to g-loading during the descent stage is the deployment of the supersonic parachutes. This is because the spacecraft is moving at Mach 3 when the parachutes are deployed, in contrast to the velocity at subsonic parachute deployment of slightly less than Mach 1. Also notice the plateau at the end of the g-load history. This plateau corresponds approximately to the gravity felt by the astronauts while on Mars. Figure 2.3.5 HAB Mars Descent - Velocity History [J. Davis] 2-3-7 Figure 2.3.6 HAB Mars Descent - G-load History [J. Davis] HAB Descent Stage Weight Breakdown Mass Breakdow n of HAB Descent Stage 135.667 594.4665 Supersonic Parachut e Mass [ kg] Subsonic Parachut e Mass [ kg] Ret ro-Rocket Propellant Mass [ kg] 3847.4045 Figure 2.3.7. Mass Breakdown of HAB Stage 2-3-8 2.3.1.3 CTV Descent The CTV descent is most difficult for the orbital mechanics (high incoming velocities) but due to the atmospheric density of Earth, the main job of the descent analyst is done by blunt body aerodynamics. It is because of this that we forego the supersonic parachutes for the CTV and use subsonic ringsail parachutes when the CTV reaches a velocity of Mach 1. Also, much like the Apollo capsule, the CTV uses no retro rockets and instead, splashes down in the ocean. This reduces the weight by relieving the need for an LRE and propellant but requires that we minimize the touchdown velocity. In order to minimize the impact at splash down, the parachute system is reefed. Reefing is a staging system where the parachutes are deployed but the skirt of each parachute is kept constricted for a period of time. This can be compared to a choice between taking a staircase with 50 steps between two floors and simply jumping down the elevator shaft to get to the lower floor. Taking one large step may be simpler, but taking it in steps causes a reduction in snatch force. After the appropriate time has passed, the reefing line is then cut and the parachutes are allowed to fully deploy. This enables the parachute system to provide a small landing velocity without an excessive snatch force. For the CTV, the altitude at which Mach 1 is obtained is 63km. Five subsonic ringsail parachutes are then deployed but reefed. It is at this point where analysis (at this level) becomes beyond our scope. Because of the increased atmosphere, reducing the g-loading using reefing is not as simple as staging. Instead, the reefing lines would be "let out" over a time period until the lines would be let loose completely and the parachutes would be fully deployed. Returning to our stairway analysis, this would be the equivalent of replacing the stairs with a slide, affording nearly no impact at all to go from one for to the next. For analysis however, the touchdown velocity and parachute weights remain the same. The touchdown velocity for such a descent is only 3.2 m/s and the weight of the parachutes are 594 kg. 2.3.1.5 Risk Analysis Parachute analysis by nature is experimental. The turbulence of the flow and absence of structural rigidity of the parachutes makes it virtually impossible to do 2-3-9 analysis (such as risk analysis) on the systems without looking at historical data. The following are possible modes of failure occurring within the parachute system: - Electronic failure (i.e., sequencers, timers, etc.) - Mechanical failure (i.e., bay doors, door latches, etc.) - Actual parachute failure (i.e., risers snapping, fabric tearing, etc.) With respect to the relative rate of occurrence of these three failure modes, Manley C. Butler, Jr., President of Butler Parachutes Systems, Inc. remarks, “In my experience with a wide variety of recovery systems, the electronic components have the highest failure rate (sequencers, timers, etc.) followed by the mechanical items (door releases, etc.) then followed a long way back by the parachute components (actual textiles).” In order to get an estimate of the occurrence of the most infrequent failure mode in recovery systems, we found statistics pertaining to catastrophic failures of personal parachute systems. According to FAI/IPC Technical and Safety Subcommittee Congress meeting, 74 catastrophic failures were experienced during 4,848,025 recorded parachute deployments. This results in a failure rate of .0015%. This means that for one parachute deployment, the odds that the parachute will fail catastrophically are 1 in 65,500. For the purposes of our mission, there are 13 parachute deployments that are life-critical (and mission critical) and 8 deployments that are mission-critical only. If any one parachute fails during the descent, the failure would result in a catastrophic failure of the descent stage and mission. With this in mind, the odds of a life-critical failure (anomaly resulting in loss of crew due only to parachute failure) are 0.00195%. The odds of a mission-critical failure are 0.00315%. These figures mean that, statistically, we would need to fly 513 missions (clear of any non-parachute-related failures) before the crew would be killed by parachute-failure. Also, we would need to fly 317 missions before we had a mission-critical parachute failure (i.e., one of the ERV parachutes failing, ending the mission but not killing the crew still on Earth). 2-3-10 References Knacke, T.W., “Parachute Recovery Systems: Design Manual”, Para Publishing, Santa Barbara, CA, 1992 Humble, R.W., Henry, G.N., Larson, W.J., “Space Propulsion Analysis and Design”, McGraw Hill Fédération Aéronautique Internationale / International Parachuting Commission, http://www.afn.org/skydive/sta/stats.html 2-3-11