ttm2013990029s1 - IEEE Computer Society
advertisement

M.R.BASHEER ET AL.: LOCALIZATION AND TRACKING OF OBJECTS USING CROSS-CORRELATION OF SHADOW FADING NOISE
Appendix
Computing Area of Overlap between Ellipses
The overlapping area |𝑆12 | in (9) can be calculated by first
computing the point of intersection 𝑝𝑙 = (𝑥𝑝𝑙 , 𝑦𝑝𝑙 ); 𝑙 ∈
{1,2,3,4} between elliptical regions 𝑆1 and 𝑆2 . Since the
maximum RSSI path detection delay τm is same for both
receivers, and the ellipses 𝑆1 and 𝑆2 share a common focus
at the transmitter, it can be easily shown that the number
of intersection points is only two. Let 𝑝1 = (𝑥𝑝1 , 𝑦𝑝1 ) and
𝑝2 = (𝑥𝑝2 , 𝑦𝑝2 ) be the point of intersection between 𝑆1 and
𝑆2 then to find 𝑝1 and 𝑝2 , simultaneously solve the implicit polynomial equations of ellipse 𝑆1 and 𝑆2 by eliminating one variable, for e.g. x, leading to a quartic equation in y. The intersection points are then the real solutions of this quartic equation. The generalized implicit
equation of an ellipse with semi-major and semi-minor
axis given by a i and bi , oriented at an angle ϕi w.r.t x-axis
(𝑐𝑥𝑖 , 𝑐𝑦𝑖 )
with
center
at
is
given
by
[(𝑥−𝑐𝑥𝑖 ) 𝑐𝑜𝑠 𝜙𝑖 +(𝑦−𝑐𝑦𝑖 ) 𝑠𝑖𝑛 𝜙𝑖 ]2
𝑎𝑖2
+
[−(𝑥−𝑐𝑥𝑖 ) 𝑠𝑖𝑛 𝜙𝑖 +(𝑦−𝑐𝑦𝑖 ) 𝑐𝑜𝑠 𝜙𝑖 ]2
𝑏𝑖2
=
1. For 𝑆1 , 𝜙1 = 0 and (𝑐𝑥1 , 𝑐𝑦1 ) = (0,0) while for ellipse
S2 ,
𝜙2 = 𝜙 = 𝑐𝑜𝑠 −1 (
𝑟2
𝑟1 𝑟2
2
2
( 𝑐𝑜𝑠 𝜙 −
,
2
2
𝑟12 +𝑟22 −𝑟12
2𝑟1 𝑟2
(𝑐𝑥2 , 𝑐𝑦2 ) =
)and
𝑠𝑖𝑛 𝜙). Subsequently, the area can be
computed from pl using Gauss-Green theorem as
1
𝜋
|𝑆12 | = |𝑆1 | + |𝑆2 | − ∫0 [𝑥1 (𝜃1 )
2
1
2𝜋
𝑑𝑦1 (𝜃1 )
𝑑𝜃
− 𝑦1 (𝜃1 )
− ∫𝜋 [𝑥2 (𝜃2 )
2
where 𝜃1 =
ψ11 =
(𝜓12 −𝜓11 )
𝜋
x
cos−1 ( ap1)
1
,
𝑑𝑦2 (𝜃2 )
𝜓12 = 𝑐𝑜𝑠
𝑑𝜃
(𝜓22 −𝜓21)
𝜋
−1
(
] 𝑑𝜃
− 𝑦2 (𝜃2 )
𝑑𝜃
𝜃 + 𝜓11 , 𝜃2 =
𝑑𝑥1 (𝜃1 )
𝑥𝑝1
𝑎1
𝑑𝑥2 (𝜃2 )
𝑏2 [(𝑦𝑝𝑙 −𝑐𝑦2 ) 𝑠𝑖𝑛(𝜙)+(𝑥𝑝𝑙 −𝑐𝑥2 ) 𝑐𝑜𝑠(𝜙)]
) ,
𝜓21 =
)
𝜓22 =
𝑎2 [(𝑦𝑝2 −𝑐𝑦2 ) 𝑐𝑜𝑠(𝜙)−(𝑥𝑝2 −𝑐𝑥2 ) 𝑠𝑖𝑛(𝜙)]
𝑡𝑎𝑛−1 (
𝑏2 [(𝑦𝑝2 −𝑐𝑦2 ) 𝑠𝑖𝑛(𝜙)+(𝑥𝑝2 −𝑐𝑥2 ) 𝑐𝑜𝑠(𝜙)]
𝑎1 𝑐𝑜𝑠(𝜃1 ) −
(𝑥𝑝1 +𝑥𝑝2)
2
,
),
𝑦1 (𝜃1 ) = 𝑏1 𝑠𝑖𝑛(𝜃1 ) −
𝑎2 𝑐𝑜𝑠(𝜙) 𝑐𝑜𝑠(𝜃2 ) − 𝑏2 𝑠𝑖𝑛(𝜙) 𝑠𝑖𝑛(𝜃2 ) + 𝑐𝑥2 −
] 𝑑𝜃
𝜃 + 2𝜓21 − 𝜓22,
𝑎2 [(𝑦𝑝𝑙 −𝑐𝑦2 ) 𝑐𝑜𝑠(𝜙)−(𝑥𝑝𝑙 −𝑐𝑥2 ) 𝑠𝑖𝑛(𝜙)]
𝑡𝑎𝑛−1 (
𝑑𝜃
𝑥1 (𝜃1 ) =
(𝑦𝑝1 +𝑦𝑝2 )
2
,
𝑥2 (𝜃2 ) =
(𝑥𝑝1+𝑥𝑝2 )
and
2
𝑦2 (𝜃2 ) = 𝑎2 𝑠𝑖𝑛(𝜙) 𝑐𝑜𝑠(𝜃2 ) −𝑏2 𝑐𝑜𝑠(𝜙) 𝑠𝑖𝑛(𝜃2 ) + 𝑐𝑦2 −
(𝑦𝑝1 +𝑦𝑝2 )
2
.
Proof of Theorem 1 (Shadow Fading Correlation Coefficient Between IEEE 802.15.4 Receivers)
Figure 2 shows the elliptical scatterer regions 𝑆1 and 𝑆2
surrounding receivers 𝑅1 and 𝑅2 respectively. Let the
number of obstacles in 𝑆1 and 𝑆2 at any communication
instance between the transmitter and receiver is given by
the Poisson distribution (2). If 𝛼𝑗𝑖 ; 𝑖 ∈ {1,2}, 𝑗 ∈
{1,2, ⋯ , 𝑀(𝑆𝑖 )} represents the attenuation of a radio signal
reaching receiver R i due to jth obstacle in scatterer region
𝑆𝑖 , then the net reduction in signal strength (in dBm) due
𝑀(𝑆 )
to 𝑀(𝑆𝑖 ) obstacles in region 𝑆𝑖 is given by 𝑍𝑠𝑖 = ∑𝑗=1 𝑖 𝛼𝑗𝑖
𝑖
where 𝑍𝑆 is the signal strength attenuation due to shadow
fading. For log-normally distributed shadow fading noise
under stationary conditions, if 𝑀(𝑆𝑖 ) is given then 𝑍𝑆𝑖 is
normally distributed i.e. if μs and σ2s corresponds to the
mean and variance of 𝛼𝑗𝑖 , then 𝑓(𝑍𝑠𝑖 |𝑀(𝑆𝑖 )) =
𝑀(𝑆𝑖 )𝑁(𝜇𝑠 , 𝜎𝑠2 ) where 𝑁(∙) is the normal distribution PDF
1
with conditional mean and variance given by
𝐸[𝑍𝑠𝑖 |𝑀(𝑆𝑖 )] = 𝜇𝑠 𝑀(𝑆𝑖 ) and 𝑉𝑎𝑟[𝑍𝑠𝑖 |𝑀(𝑆𝑖 )] = 𝜎𝑠2 𝑀(𝑆𝑖 ) respectively.
The correlation coefficient between shadow fading
random variables 𝑍𝑠1 and 𝑍𝑠2 is given by
𝜌=
𝑐𝑜𝑣(𝑍𝑠1 ,𝑍𝑠2 )
√𝑉𝑎𝑟(𝑍𝑠1 )𝑉𝑎𝑟(𝑍𝑠2 )
(A1)
which require the derivation of 𝑉𝑎𝑟(𝑍𝑠𝑖 ) and 𝑐𝑜𝑣(𝑍𝑠1 , 𝑍𝑠2 ).
Since 𝐸{𝑀(𝑆𝑖 )} = 𝑉𝑎𝑟{𝑀(𝑆𝑖 )} = 𝜔|𝑆𝑖 |, 𝑉𝑎𝑟(𝑍𝑠𝑖 ) can be derived from law of total of variance as
𝑉𝑎𝑟(𝑍𝑠𝑖 ) = 𝑉𝑎𝑟{𝐸[𝑍𝑠𝑖 |𝑀(𝑆𝑖 )]} + 𝐸{𝑉𝑎𝑟[𝑍𝑠𝑖 |𝑀(𝑆𝑖 )]}
= 𝑉𝑎𝑟{𝑀(𝑆𝑖 )𝜇𝑠 } + 𝐸{𝑀(𝑆𝑖 )𝜎𝑠2 } = 𝜔(𝜇𝑠2 + 𝜎𝑠2 )|𝑆𝑖 | (A2)
whereas, 𝑐𝑜𝑣(𝑍𝑠1 , 𝑍𝑠2 ) can be derived from the law of total
covariance as
𝑐𝑜𝑣(𝑍𝑠1 , 𝑍𝑠2 ) = 𝑐𝑜𝑣{𝐸[𝑍𝑠1 |𝑀(𝑆1 )], 𝐸[𝑍𝑠2 |𝑀(𝑆2 )]}
+𝐸{𝑐𝑜𝑣[𝑍𝑠1 , 𝑋𝑠2 |𝑀(𝑆1 ), 𝑀(𝑆2 )]}.
(A3)
Since conditional mean is given by 𝐸[𝑍𝑠𝑖 |𝑀(𝑆𝑖 )] =
𝜇𝑠 𝑀(𝑆𝑖 ), the covariance of the conditional mean in (A2),
can be simplified as 𝑐𝑜𝑣{𝐸[𝑍𝑠1 |𝑀(𝑆1 )], 𝐸[𝑍𝑠2 |𝑀(𝑆2 )]} =
𝜇𝑠2 𝑐𝑜𝑣[𝑀(𝑆1 ), 𝑀(𝑆2 )]. Since for a spatial Poisson processes,
random variables corresponding to the Poisson count for
disjoint areas are independent, the radio obstacle count
for Si can be written as the sum of two independent Poisson random variables by splitting the region 𝑆𝑖 into two
𝑐 )⋃𝑆
disjoint areas as 𝑆𝑖 = (𝑆𝑖 ⋂𝑆12
12 resulting in 𝑀(𝑆𝑖 ) =
𝑐 )⋃𝑆
𝑐 )
𝑀((𝑆𝑖 ⋂𝑆12
)
=
𝑀(𝑆
⋂𝑆
+
𝑀(𝑆
Let
𝐴𝑖 =
12
𝑖
12 ).
12
𝑐 )
𝑐 |)
𝑀(𝑆𝑖 ⋂𝑆12
and 𝐵 = 𝑀(𝑆12 ) then, 𝐴𝑖 ~𝑃𝑜𝑖𝑠𝑠𝑜𝑛(𝜔|𝑆𝑖 ⋂𝑆12
and 𝐵~𝑃𝑜𝑖𝑠𝑠𝑜𝑛(𝜔|𝑆12 |) resulting in 𝑐𝑜𝑣[𝑀(𝑆1 ), 𝑀(𝑆2 )] =
𝑐𝑜𝑣(𝐴1 + 𝐵, 𝐴2 + 𝐵) = 𝑉𝑎𝑟(𝐵) = 𝜔|𝑆12 |. Therefore, the
covariance of conditional mean in (A3) is given by
𝑐𝑜𝑣{𝐸[𝑍𝑠1 |𝑀(𝑆1 )], 𝐸[𝑍𝑠2 |𝑀(𝑆2 )]} = 𝜇𝑠2 𝜔|𝑆12 |.
To compute the expectation of conditional covariance
𝐸{𝑐𝑜𝑣[𝑍𝑠1 , 𝑍𝑠2 |𝑀(𝑆1 ), 𝑀(𝑆2 )]} in (A3), we split the shadow
𝑀(𝑆 )
𝐴𝑖 +𝐵 𝑖
fading noise at each receiver as 𝑍𝑠𝑖 = ∑𝑗=1 𝑖 𝛼𝑗𝑖 = ∑𝑗=1
𝛼𝑗 =
𝐶𝑖 + 𝐷 where 𝐶𝑖 is the shadow fading attenuation due to
𝑐
region 𝑆𝑖 ⋂𝑆12
and 𝐷 is the shadow fading due to the overlapping region 𝑆12 . Therefore, the conditional mean is
given by 𝐸{𝑐𝑜𝑣[𝑍𝑠1 , 𝑍𝑠2 |𝑀(𝑆1 ), 𝑀(𝑆2 )]} = 𝐸{𝑐𝑜𝑣[𝐶1 + 𝐷, 𝐶2 +
𝐷|𝑀(𝑆1 ), 𝑀(𝑆2 )]} = 𝐸{𝑉𝑎𝑟[𝐷|𝑀(𝑆12 )]} = 𝜎𝑠2 𝜔|𝑆12 | resulting in (A3) being simplified as
𝑐𝑜𝑣(𝑍𝑠1 , 𝑍𝑠2 ) = 𝜔(𝜇𝑠2 + 𝜎𝑠2 )|𝑆12 |.
(A4)
Finally applying (A2) and (A4) on (A1) results in (9). ■
Proof of Theorem 2 (Shadow Fading Cross-Correlation
Likelihood Function)
The cost function for the maximum likelihood estimate of
a parameter is the joint distribution of the multiple observations of a random variable when the value of the parameter is assumed to be known. For our application the
Cartesian coordinates of the transmitter is the parameter
to be estimated while the random variables that are being
observed are the shadow fading residuals at each receiver. Therefore, to derive the joint distribution of shadow
fading residuals from semi-parametric marginal CDF giv-
2
IEEE TRANSACTIONS ON MOBILE COMPUTING, MANUSCRIPT ID
en by (11) and pair-wise correlation coefficient given by
(9) we will use the elliptical copula function since the dependency between the shadow fading residuals that is
being modeled is the correlation coefficient which is a
linear dependency. In addition, t-copulas capture the linear dependency between extreme values of the random
variable [17]. Hence for 𝑀 receivers, the student-t copula
density with 𝜍 degree of freedom (DoF) and 𝑀 × 𝑀 correlation coefficient matrix ℶ is given by [17] as
𝑐𝜍,ℶ (𝑢1 , 𝑢2 , … , 𝑢𝑀 ) =
(A5)
−1
∏𝑀
𝑘=1 𝑓𝜍 (𝑡𝜍 (𝑢𝑘 ))
𝜍+𝑀
𝑓𝜍,ℶ (𝑥1 , 𝑥2 , … , 𝑥𝑀 ) =
𝛤( 2 )
1
𝑀
𝜍
|𝛲|2 (𝜍𝜋) 2 𝛤( )
2
[1 +
𝕩 = [𝑥1 , 𝑥2 , … , 𝑥𝑀
𝑓𝜍 (𝑥) =
𝜍
(𝜍+𝑀)
2
−
]
,
(𝜍+1)
𝑟𝑛 = 𝑟𝑛−1 √1 −
2𝛥𝑟𝑛 𝑐𝑜𝑠 𝜃𝑛−1
𝑟𝑛−1
, and
̃𝑖 (𝑧𝑠𝑖 )
𝛤(∙) is the Gamma function. Finally, setting 𝑢𝑖 = 𝐹
+[
written as |𝑆𝑛 | = |𝑆𝑛−1 | (1 −
𝛽𝑛−1 = √1 −
βn−1 rn−1
rm +rn−1
2𝛥𝑟𝑛 𝑐𝑜𝑠 𝜃𝑛−1
𝑟𝑛−1
) √1 −
+[
𝛥𝑟𝑛
𝑟𝑛−1
βn−1 rn−1
rm +2rn−1
2 +2𝑟 𝑟
𝜋(𝑟𝑚 +𝑟𝑛 )√𝑟𝑚
𝑚 𝑛
4
. Since
2
] the area 𝑆𝑛 can be
𝛽𝑛−1 𝑟𝑛−1
𝑟𝑚 +𝑟𝑛−1
) √1 −
𝛥𝑟𝑛 2
𝑟𝑛−1
] − 1.
2𝛽𝑛−1 𝑟𝑛−1
𝑟𝑚 +2𝑟𝑛−1
Setting
where
γn−1 =
− 1 results in the elliptical area
for 𝑆𝑛 being represented by the area of 𝑆𝑛−1 as |Sn | =
|Sn−1 |(1 + γn−1 ). Therefore, (A6) can be written as Dα (n −
1 ∥ n) = ω|Sn−1 |[(1 − α)γn−1 + 1]
k
− log {∑∞
k=0
[ω|Sn−1 |(1+γn−1 )(1−α) ]
k!
1
}. Since ∑∞
k=0 [ω|Sn−1 |(1 +
k!
k
− 2
𝛤( 2 )
𝑥2
]
𝑣 [1 +
𝜍
√𝜍𝜋𝛤(2)
𝜍+1
]𝑇
𝕩𝑇 ℶ−1 𝕩
and |𝑆𝑛 | =
4
(1 −
𝑓𝜍,ℶ (𝑡𝜍−1 (𝑢1 ),𝑡𝜍−1 (𝑢2 ),…,𝑡𝜍−1 (𝑢𝑀 ))
where 𝑢𝑖 ∈ [0,1] is the standard uniform random variable,
2 +2𝑟 𝑟
𝜋(𝑟𝑚 +𝑟𝑛−1 )√𝑟𝑚
𝑚 𝑛−1
γn−1 )(1−α) ] = exp{ω|Sn−1 |(1 + γn−1 )(1−α) },
(1−α) k
[ω|Sn−1 |(1+γn−1 )
log {∑∞
k=0
k!
]
resulting
} = ω|Sn−1 |(1 + γn−1
)(1−α)
in
.
in (A5) gives the likelihood function for transmitter Hence, the 𝛼-divergence between RSSI values collected at
localization using shadow fading cross-correlation as time instants (𝑛 − 1) and 𝑛 is given by (13).
(12)
■
Proof of Theorem 3 (𝜶-Divergence of Shadow Fading
Residuals From An IEEE 802.15.4 Transmitter)
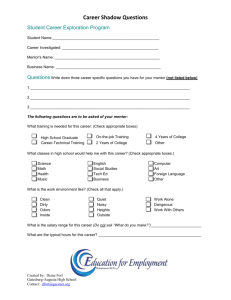
Figure A1 shows the tracking of an IEEE 802.15.4 mobile
transmitter by a stationary receiver. At each sampling
instance, receiver collects a sequence of 𝑁 RSSI values
from the transmitter. Assume that at time instant 𝑛 − 1 ,
the mobile transmitter is at position 𝜂𝑛−1 and in the subsequent instance 𝑛 , the receiver moved by radial distance
𝛥𝑟𝑛 to reach location 𝜂𝑛 . In addition, assume that during
this time period, the heading of the mobile transmitter
changed by 𝛥𝜙𝑛−1 while the bearing between the mobile
transmitter and stationary receiver at the origin changed
by 𝛥𝜓𝑛−1 .
Shadow fading noise at positions 𝜂𝑛−1 and 𝜂𝑛 arise
from the movement of pedestrians or machinery within
elliptical fading region 𝑆𝑛−1 and 𝑆𝑛 respectively formed
between the transmitter and receiver. Therefore, the αdivergence between 𝑁 RSSI values collected at positions
𝜂𝑛−1 and 𝜂𝑛 can be derived by substituting the shadow
fading PDF given by (1) at positions 𝜂𝑛−1 and 𝜂𝑛 in αdivergence equation (2) resulting in
𝐷𝛼 (𝑛 − 1 ∥ 𝑛) =
∞
𝛼
1−𝛼
− 𝑙𝑜𝑔{∫−∞ ∑∞
𝑑𝑥 }
𝑘=0[𝑓(𝑥|𝑘)𝑓(𝑘|𝑆𝑛−1 )] [𝑓(𝑥|𝑘)𝑓(𝑘|𝑆𝑛 )]
∞
𝛼
1−𝛼
= − 𝑙𝑜𝑔{∫−∞ ∑∞
𝑑𝑥}
𝑘=0 𝑓(𝑥|𝑘)[𝑓(𝑘|𝑆𝑛−1 )] [𝑓(𝑘|𝑆𝑛 )]
∞
𝛼
1−𝛼
= − 𝑙𝑜𝑔{∑∞
∫−∞ 𝑓(𝑥|𝑘)𝑑𝑥 }
𝑘=0[𝑓(𝑘|𝑆𝑛−1 )] [𝑓(𝑘|𝑆𝑛 )]
𝛼
1−𝛼 }
= − 𝑙𝑜𝑔{∑∞
𝑘=0[𝑓(𝑘|𝑆𝑛−1 )] [𝑓(𝑘|𝑆𝑛 )]
|𝑆𝑛 |
= 𝜔(1 − 𝛼)|𝑆𝑛−1 | (|𝑆
𝑛−1 |
𝑙𝑜𝑔 {∑∞
𝑘=0
− 1) −
𝑒𝑥𝑝{−𝜔|𝑆𝑛−1 |}(𝜔|𝑆𝑛−1 |)𝑘
𝑘!
|𝑆𝑛|
(|𝑆
𝑛−1
)
|
(1−𝛼)𝑘
}
(A6)
where |𝑆𝑛−1 | and |𝑆𝑛 | are the area for elliptical regions
𝑆𝑛−1 and 𝑆𝑛 respectively and are given by |𝑆𝑛−1 | =
Figure A1. Continuous tracking of a mobile receiver