Whalen
advertisement

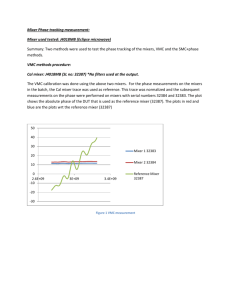
Mixer Optimization for Increased Pump-Probe Phase Detection Sensitivity Michael Whalen Introduction The Linac Coherent Light Source currently can produce enormously powerful x-ray pulses up to 3mJ in with energies of 800eV to 2keV. The ability to produce such bright light beams at these wavelengths has given the scientific community a remarkable tool for probing molecules down to the resolution of single atoms. One hutch at the LCLS is devoted to X-ray pump-probe experiments. The XPP uses short powerful laser pulses to probe the dynamics of different molecules. An optical laser will initiate the molecular change or reaction, and shortly after be followed by an LCLS X-ray pulse for scattering and analysis. By varying and noting the timing difference between the laser pulse and the x-ray pulse, one can repeat the experiment numerous times with different separations, and reconstruct a “movie” of the reaction. Currently, the LCLS can produce x-ray pulses as short as 5 femtoseconds. This puts an absolute lower bound on the phase timing difference that can be measured. In order to determine the phase difference between the XPP’s laser and x-ray pulse, a measurement system consisting of feedback mechanisms and phase shifters to correct for cable length differences and small phase drifts between the components is in place. Everything starts from the same master oscillator, which is used to first accelerate the electrons; furthermore, due to the structure of the accelerator, they travel along locked in phase with one crest of the source. Once at relativistic speeds, they pass through the undulators, creating a coherent x-ray source. The master source also drives the optical laser used to conduct the experiment, but this first must be shifted to be in phase with the x-rays. To do this, the traveling electron bunch is passed through an S-band RF cavity which resonates and creates an electric signal. It is this signal that enters the phase detector, which is a heterodyne mixer, along with the master oscillator signal and is adjusted by the phase shifter to zero the output to the region where the readings are most sensitive. With these current microwave techniques, physicists at SLAC have been able to measure timing separations with accuracy down to 50 femtoseconds [1]. The two main problems this measurement system faces are noise levels and drift stability of the electronic devices. Along with the heterodyne mixers, other microwave components such as operational amplifiers, phase shifters, low pass filters, attenuators, and splitters add noise to the system and through testing an optimal performance system can be deduced. Materials and Methods This experiment consists of 2 main setups: the first to provide information about the phase to voltage sensitivity of each mixer, and the second to test different combinations of components and determine the noise levels associated with each. Combining these two sets of data, a sensitivity to noise ratio is acquired, from which a maximum value can be determined and an optimal set of components resolved. As double balanced heterodyne mixers are currently being used to make phase measurements in the LCLS, these are the components determining the sensitivity of the phase timing. When a heterodyne mixer receives two input signals, into the Local Oscillator Port, LO, and the Radio Frequency Port, RF, they are processed through a ring diode setup and an output signal is seen from the Intermediate Frequency Port, IF. A typical Schottky diode can be described by 𝐼 = 𝑎1 𝑉 + 𝑎2 𝑉 2 + 𝑎3 𝑉 3 + 𝑎4 𝑉 4 + ⋯ (1) When this diode is excited by two sinusoidal waves, Cos(ω1t) and Cos(ω2t), as such in the mixer, the equation thus becomes 2 𝐼 = 𝑎1 (Cos(ω1 t) + Cos(ω2 t)) + 𝑎2 (Cos(ω1 t) + Cos(ω2 t)) + ⋯ (2) When this equation is expanded the term 2𝑎2 Cos(ω1 t)Cos(ω2 t) is contained and has the trigonometric relationship below. 2𝑎2 Cos(ω1 t)Cos(ω2 t)=Cos((ω1 − ω2 )t) + Cos((ω1 + ω2 )t) (3) This is the defining output of heterodyne mixing. [2] The two input sinusoidal waves describe the LO and RF inputs. The first and second terms on the right side of equation 3 described the difference term of the IF output and the summation term respectively. Since we are only interested in the difference frequency, the higher frequency term is removed by a low pass filter, as seen in Figure 1. Three mixers were tested to determine the voltage per picoseconds phase movement, which is a measure of the mixers’ sensitivities. Three mixers from Mini-Circuits used include models ZX05-HW-S+, ZFM-4H-S+, and ZFM-150. Two signal generators, Hewlett Packard E4432B ESG-D Series and Hewlett Packard 8656B, were used to generate LO and RF inputs respectively. The RF was set at 476 MHz and the LO at 476.01 MHz to generate at 10 kHz IF output. Both signals passed through a Mini-Circuits VLFX-470 Low Pass Filter with a passband from DC to 470 MHz. While this slightly attenuated the signals, it served to eliminate higher level harmonics from creating unwanted signals and noise in the mixer. Sensitivity readings were taken with LO powers of 5, 10, 17, and 20 dBm for the first to listed mixers along with an additional 0dBm reading taken for the third due to its lower power level specs for LO inputs. At each of these levels, RF inputs of 0, 5, 10, 15 dBm were taken. As cables have some loss, a MiniCircuits PWR-SEN-6GHS+ Power Sensor was used before every measurement right before the input ports to assure the correct power levels. This array of data was taken as such to allow for interpolation of sensitivities for the next part of the experiment, where noise to sensitivity ratios are determined and exact power level inputs could not be constructed. The IF output of the mixer is sent through a Mini-Circuits SLP-100+ Low Pass Filter with a passband from DC to 98 MHz to eliminate the summation frequency and only allow the difference frequency to be analyzed in the Tektronix TDS3032 Oscilloscope. With the oscilloscope, the 10 kHz wave for each combination of power inputs is measured for its voltage maximum and minimums and more importantly its sensitivity. When determining phase with a mixer it is preferable to use the portion of the IF that crosses directly at the 0 V mark. When the signals are in phase or 180 degrees out of phase the IF signals are at a maximum or minimum. Around these points, when the phases shift slightly, almost no discernable difference in phase shift, as a voltage, can be determined; only changes in power input, seen as a change in amplitude will be seen. When the signals are 90 degrees out of phase, the sinusoidal waves slope is the greatest. This is where mixers will operate optimally; here the slightest phase change results in a large voltage change and power input changes will theoretically not affect the sensitivity. By zooming into the zero intercept on the oscilloscope and measuring the voltage change per time, a measure of the mixers sensitivity has been taken. This voltage per time can then be back converted to volts per cycle for the IF, as we know the frequency of the IF. Finally, this is then converted to volts per picosecond for the RF input as we know the RF/IF frequency ratio. When trying to optimize a phase detection system, mixer sensitivity alone cannot be used, a ratio of sensitivity to noise must be obtained and analyzed. To measure sensitivity a single RF source is used, as seen in Figure 2. The Hewlett Packard E4432B ESG-D Series Signal Generator was set to 476 MHz, the frequency of the master oscillator for the LCLS. To obtain power levels needed to examine a wider range of LO and RF inputs a Mini-Circuits ZHL-2010+ Low Noise Amplifier was placed between the RF source and the low pass filter. This also served to remove any harmonics created by the amplifier. Next, the signal was split by either a MiniCircuits ZFSC-2-1W+ Power Splitter or a Anaren 40263 Power Splitter, which were both tested to determine differences between magnetic core splitters and stripline splitters respectively. For noise experiments a splitter is used in order to allow both the RF and LO inputs to have exactly the same frequency and the mixer output a DC voltage. The signal leading to the RF input is passed through a Aeroflex Weinschel Model 980 Mechanical Phase Shifter in or to adjust the phase difference obtained through the difference in path lengths leading to the RF and LO ports. Before noise measurements are taken, the IF output is fed into a FLUKE 289 TRUE RMS Multimeter. With the phase shifter, the DC output on the voltmeter is adjust to read 0V, thereby setting the two inputs 90 degrees out of phase and setting the position of highest sensitivity which will be where actually phase detection is run. Next, the signal is fed into an Agilent 89441A Vector Signal Analyzer for noise level readings. The power levels these were taken at were exact LO matches to the sensitivity reading levels while the RF readings were taken as close as possible by use of attenuators before the RF port. Any differences were accounted for by interpolation between sensitivity data. For each of these power levels, the noise floor was determined at 4 different bandwidths, 10Hz,1kHz,100kHz,1MHz. The noise floor voltage divided by the square root of the bandwidth gives a measure of V/√𝐻𝑧. The noise per bandwidth over the sensitivity will finally give you a noise per sensitivity ratio which can be compared to determine the best mixer, splitter, LO, and RF combination. Charts and Figures RF Source 476 MHz Low Pass Filter DC to 470MHz RF IF Mixer Low Pass Filter DC to 98 MHZ Oscilloscope LO LO Source 476.01 MHz Low Pass Filter DC to 470MHz Figure 1 RF Source 476 MHz Phase Shifter RF IF Mixer LO RF Amplifier 20 dB Gain Figure 2 Low Pass Filter DC to 470MHz Power Splitter Low Pass Filter DC to 98 MHZ Spectrum Analyzer References [1] A. Brachmann, et al,. Femtosecond Operation of the LCLS for User Experiments: TUPE066 International Particle Accelerator Conference, May 23-28, 2010, Kyoto, Japan. [2] Devlin Liam “Mixers,” Plextek Communications Technology Consultants, July 17, 2003. [Online]. Availible: http://www.plextek.co.uk/papers/mixers2.pdf. [Accessed: July 20, 2010].