gwat12344-sup-0001-Appendix
advertisement

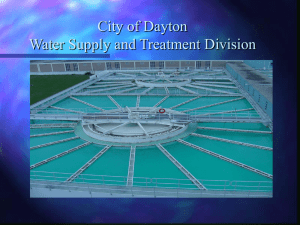
HYDRAULIC TOMOGRAPHY: CONTINUITY AND DISCONTINUITY OF HIGH-K AND LOW-K ZONES (GROUNDWATER MANUSCRIPT No. 12344) David L. Hochstetler, Warren Barrash, Carsten Leven, Michael Cardiff, Francesco Chidichimo, Peter K. Kitanidis SUPPORTING INFORMATION CONTENTS: Appendix S1. Supporting details of hydraulic tomography testing in Sardinia. Appendix S2. Supporting details of forward and inverse modeling. Table S1. CMT observation locations. Figure S1. Aerial view of industrial site with groundwater flow directions, barrier pumping wells, monitoring wells, and inset of 3D THT testing area. Figure S2. Photograph of 3D THT testing area. Figure S3. Hydrographs of testing period from three monitoring wells near test site. Figure S4. Hydrographs focusing on daily trends from three monitoring wells near test site. Figure S5. Drawdown data from validation test with pumping from CMT3-2 and simulated drawdown using forward model with 3D THT parameter field. Figure S6. Drawdown data from validation test with pumping from CMT3-4 and simulated drawdown using forward model with 3D THT parameter field. Figure S7. Drawdown data from validation test with pumping from CMT1-2 and simulated drawdown using forward model with 3D THT parameter field. Figure S8. Drawdown data from validation test with pumping from CMT1-7 and simulated drawdown using forward model with 3D THT parameter field. Figure S9. Drawdown data from validation test with pumping from CMT1-4 and simulated drawdown using forward model with 3D THT parameter field. Figure S10. Drawdown data from validation test with pumping from CMT5-2 and simulated drawdown using forward model with 3D THT parameter field. Appendix S1. Supporting details of hydraulic tomography testing in Sardinia. Site Description The hydrogeological setting for the 3D THT (transient hydraulic tomography) tests of this study is the surficial alluvial sedimentary aquifer system of the southern Campidano Plains near the Gulf of Cagliari in southern Sardinia, Italy (e.g., Ciabatti and Pilia 2004). This aquifer system is comprised of a relatively permeable Upper Alluvial Complex of clay to sand-and-gravel bodies of variable individual geometries in a complex, heterogeneous architecture that overlies a lesspermeable Lower Alluvial Complex dominated by silts and clays. The specific test location is within an industrial site where legacy groundwater contamination is captured for on-site treatment by a series of barrier wells at the down-gradient boundary of the site (Figure S1). The HT experiments of this study were conducted in October 2013 at a locally accessible area 200 m to 1200 m from the barrier wells (Figure S2). Barrier well PR01, which is very close to the test area, was turned off seven days prior to our testing. The test area was relatively near two wells (PC032 and SB41) of six wells in which we monitored water levels at 3-minute intervals during the HT testing period (Figures S1 and S3-S4). This background monitoring recorded two daily water-level fluctuation cycles of about 0.01-0.03 m amplitude (average head-change rate of about 5 107 m/s), several 5-7 day cycles, and a superimposed regional scale downward water-level trend of about 0.14 m during the 2.5 week period when testing occurred (i.e., about 10-7 m/s). No other local boundary or secular influences on the HT testing occurred; the weather was dry during the testing period with only a few occurrences of night-time rain and daytime drizzle which did not register as recognizable influences in the background monitoring. Observation Network The HT testing was conducted within a logistical area of about 20 m x 20 m with the following infrastructure (Figure S2): (a) a specially constructed pumping well (NPM01) was emplaced 2.5 m from an existing monitoring well (PM01) and (b) five clusters of CMTs (manufactured by Solinst Inc.) with three nested CMTs in each cluster (2 x 3-channel and 1 x 7channel) were emplaced at 6.7 m to 8.5 m radial distances from NPM01, and at approximately equally spaced radial angles from each other. Each CMT channel has a single opening 15-cm long. Based on hydrogeological knowledge at the industrial site, including lithologic and construction logs from PM01 and nearby wells SB41 and PR01 (Figure S1) with low-K material below about 20 m below land surface (BLS), completion depths for the new pumping well NPM01 and CMT clusters were: 19.5 – 20.4 m BLS for the deepest CMTs, 14.8 – 15.0 m BLS for the mid-depth CMTs, and 10.0 m BLS for the shallowest CMTs. Depth to water at the time of testing was approximately 5 m BLS. Thirteen access openings in each of the CMT clusters were vertically spaced over the 15 m from lowest observation point to the water table to provide high-density observation coverage for the HT testing (Table S1). NPM01 was constructed for this project to support pumping from numerous hydrologically isolated short zones without allowing uninhibited flow in an annular space between the well and the formation (e.g., Einarson 2006). In particular, 10-cm ID PVC screen (from 5.27 m to 20.37 m BLS) was installed in a 20-cm borehole with alternating coarse sand (generally 76-cm thick but variable to accommodate well screen joints) and bentonite (generally 24-cm thick). In total, 15 zones were available for separate pumping tests through the 15-m saturated testing interval (see Table 1, Hochstetler et al. 2015-in review). Well PM01 had been previously constructed for monitoring in the traditional manner with screen from the water table to 20 m BLS and continuous sand pack in the annular space. To limit effects of homogenization of pressure changes due to the presence of PM01 in the testing volume as a high-conductivity vertical conduit, a modular removable packer and port system (U.S. patent 8770305, Boise State University) was placed in PM01 to reduce vertical pressure communication within the screened portion of the well. Fiber-optic pressure transducers (custom built by FISO Technologies, Inc.) were used for measuring head changes at observation locations and in the pumping well because of their accuracy and precision (capable of recording head changes <1 mm), fast and adjustable sampling rate, and small-diameter probe and cable allowing insertion into CMTs and into small-diameter tubing used in the pumping (straddle packer) system in NPM01 and the modular packer and port system in PM01. Pressure measurements were collected as “bursts” of 10 measurements each over 0.006 seconds with bursts occurring at increasing intervals until about 8 min elapsed time when the interval was constant at about 10 s. Averaging of bursts reduces high-frequency instrument noise which significantly improves resolution of measurements and data selection for matching in the tomographic inversion. For this study, transducers were available to populate only half the observation zones at a time, thus the pumping test series was conducted twice – with observations in lower zone and upper zone configurations, respectively (Table 1 and Figure 2 of Hochstetler et al. 2015-in review). Pumping Tests Description Based on previous experience with aquifer testing in a highly permeable sand-and-gravel aquifer, we anticipated running short-duration pumping tests to acquire sufficient data for highresolution analysis while allowing time-efficient field testing (e.g., Barrash et al. 2006; Cardiff et al. 2012, 2013). However, given the range of aquifer materials (clay to sand and gravel) and associated large ranges in hydrologic properties at the Assemini site, we conducted pre-test modeling to assess essential testing acquisition parameters (e.g., pumping rates, pumping times, expected drawdown magnitudes, necessary recovery times between tests) to assure high-quality data with efficient time management. In particular, pre-test modeling using hypothetical realizations of the aquifer provided us with an understanding of the impact that recovery time after a given test had on the error (as a superimposed water-level trend) introduced to the observations in a following test. It was determined that for most tests of a 15-minute pumping duration, 40 minutes of recovery time was sufficient for the recovery rate of the water table to be insignificant relative to the other noise in the aquifer and the data collection system. For all pumping tests during the field campaign, we allowed at least 45 minutes of recovery time from the previous test. A straddle-packer system with a submersible pump (Geotech Environmental SS Geosub Pump) between the packers was used for most pumping tests. The open/pump interval length when the packers were inflated was 1.14-1.18 m and the straddle packer was carefully located to have the open/pump interval centered between bentonite rings such that it was pumping through the isolated, highly-permeable section of the well’s annular space. A peristaltic pump (Masterflex I/P) was used to pump the uppermost zones (pumping intervals 14 and 15) in NPM01 (Table 1 of Hochstetler et al. 2015-in review) to avoid pump exposure and dewatering when using the submersible pump. Nevertheless, even when using the peristaltic pump for NPM01-14 and NPM01-15 with lower pumping rates of 1.9 L/min and 3.3 L/min, the pumping zone became dry after 400 s and 200 s, respectively. Due to the reduced response at observation zones, the short time duration of these two tests, and greater variability in the pumping rate, the pumping tests conducted at NPM01-14 and NPM01-15 were not used in the tomographic analysis. It is also worth noting that the recovery rate of the water table after pumping from the uppermost zones was significantly slower than for pumping from zones 1-13. As such, we allowed for 4 hours of recovery after pumping from NPM01-15 and over 12 hours (overnight) after pumping from NPM01-14. For completeness we note that seven pumping tests from CMT zones (using the peristaltic pump) were conducted on a reconnaissance basis. These tests are used for independent quality evaluation of the HT results (Hochstetler et al. 2015-in review). The flow rates for all pumping tests were measured using a bucket-and-stopwatch method in which the discharge line was fixed at a constant location at a graduated barrel. Times were recorded at each volume increment of 5 L throughout a given test. Additionally, we used a 10-L graduated bucket to record times to fill 2 L increments throughout the testing period. For the low-flow rate tests with the peristaltic pump, we used the smaller bucket and recorded times for 1-L volume increments. For all but seven of the pumping tests, the normalized standard deviation of the measured flow rate throughout the pumping tests was <10%, while six tests had measured rate variability in the 10% - 20% range, and one test – pumping from NPM01-6 on 22 Oct 2013 – had variability of 27%. During the latter test, there was a trend in the pumping rate going from 3.3 L/min to 1.9 L/min over the span of 5 minutes and the pumping interval was actually pumped dry. Since the pumping rates for all other tests were reasonably steady, we used the mean flow rate for modeling each pumping test. However, it is acknowledged that a more-sensitive in-line digital flowmeter would capture higher frequency flow-rate variation that might be useful in more-detailed transient modeling. Operational Considerations Because the 3D THT testing for this study occurred at an active industrial site with contaminated groundwater, we captured all discharge water from pumping tests for transfer to the site treatment facilities. The total volume captured for all the tests (Tables 1 and 3 of Hochstetler et al. 2015-in review) was 1612 L; some additional very minor fraction of this volume also was pumped in false starts and equipment tests. We note again that the number of tests from NPM01 was double (i.e., volume pumped was nearly double) what would be required if the HT testing were performed in production mode with a full complement of transducers. Also we note that the time required for running tests (not including initial site and daily set-up/take-down and other logistical time) was commonly 60-75 min per test which included repositioning of the pump, initializing data acquisition, pumping, and recovery, Disclaimer Brands of equipment are named here for informational purposes only to document operations and do not represent endorsements of any particular products. References Barrash, W., Clemo, T., Fox, J.J., and Johnson, T.C. 2006. Field, laboratory, and modeling investigation of the skin effect at wells with slotted casing. Journal of Hydrology 326, no. 1-4: 181198. DOI:10.1016/j.jhydrol.2005.10.029 Cardiff, M., W. Barrash, and P.K. Kitanidis. 2012. A field proof-of-concept of aquifer imaging using 3D transient hydraulic tomography with modular, temporarily-emplaced equipment. Water Resources Research 48: W05531. DOI:10.1029/2011WR011704 Cardiff, M., W. Barrash, and P.K.Kitanidis. 2013. Hydraulic conductivity imaging from 3D transient hydraulic tomography at several pumping/observation densities. Water Resources Research 49, no. 11: 7311-7326. DOI:10.1002/wrcr.20519 Ciabatti P., and A. Pilia. 2004. Simulazione del flusso idrico sotterraneo dell'acquifero alluvionale multifalda della piana del Campidano meridionale (Sardegna). Quaderni di geologia applicata 1: Pitagora Editrice. Einarson, M.D. 2006. Mulitlevel ground-water monitoring, Chapter 11. In Practical Handbook of Environmental Site Characterization and Ground-Water Monitoring, 2nd ed., Boca Raton, FL, ed. D. Neilsen. 808-848. CRC Press. Hochstetler, D., W. Barrash, C. Leven, M. Cardiff, F. Chidichimo, and P.K. Kitanidis. 2015-in review. Locating continuity and discontinuity of high-K and low-K zones with hydraulic tomography. Groundwater (manuscript GW20141021-0300). Appendix S2. Supporting details of forward and inverse modeling. Forward model In the HT campaign, we are only concerned with flow in the saturated portion of the aquifer. The governing equation for saturated, unconfined groundwater flow with insignificant spatial density gradients is Ss K K K w t x x y y z z (1) where is hydraulic head [ L ], S s is specific storage [ L1 ], K is hydraulic conductivity [ LT 1 ] , and w represents any sources or sinks of water, given in units of volumetric flow rates per unit volume [[ L3T 1 ]L3 ] . We use the groundwater flow software MODFLOW (Harbaugh 2005) to simulate each of the transient pumping tests conducted in the field and for the inversion process. The top of the modeling domain is the water table (a free boundary, i.e., the elevation of the water table is a dependent variable whose location is determined by z ), the bottom boundary of the domain is assumed to be a no-flux boundary ( 0 ), and far from the testing volume, the lateral z boundaries of the model are assumed to be constant-head boundaries with the same value ( 0 ). When the water level in a MODFLOW model cell drops below the top boundary of that cell, then the storage parameter specific yield Sy (rather than Ss) is invoked. Under this scenario, a unit drop in the water table over a unit area instantaneously yields a volume of water proportional to Sy (Harbaugh 2005). Note that under our testing and modeling conditions where we perform short (15minute) pumping tests, we assume an instantaneous water table response and the specific yield inverted for and used is an “effective” parameter that is smaller (because of the very short test period) than what one would expect the specific yield of the aquifer to be at full drainage over a longer time period (see the discussion in Cardiff and Barrash 2011, and references therein). Based on prior hydrogeological site reports and discussion with site staff, we assumed the bottom no-flux boundary, which represents a local low-permeability zone, to be located at z 19 m above mean sea level (AMSL), which is approximately 19.5 m below the pre-testing water table and 25 m BLS. Due to the favorable site conditions and weather (see Appendix S1), assuming the simplest boundary conditions (e.g., no changing head gradients, no recharge, etc.) was justifiable. Extending the lateral boundaries of the model domain to 40.5 m in cardinal directions from the pumping well NPM01 reduced the numerical impacts of those boundaries on the solution (which can be a source of bias in simulated drawdown at the observation locations) while maintaining a tractable modeling problem. Thus, the overall domain size for each forward model (the numerical model to simulate a given pumping test) is 81 m x 81 m x 19.8 m. The model domain is discretized in cells that are at maximum 1 m x 1 m x 0.6 m, with increasing refinement in cells near the pumping well, where the smallest cell size is 0.1 m x 0.1 m x 0.06 m. Each MODFLOW model consists of 2.31 million cells. The open well, packers in the well and bentonite rings in the annular space, and gravel rings in the annular space were all represented explicitly in the model domain with fixed hydraulic conductivity values of 1.0 m/s, 4.0 106 m/s, and 4.0 103 m/s, respectively. This was necessary to allow the MODFLOW model to solve the simulations for cases where the pumping well was in a low-K formation. Furthermore, the scale of such features (0.1 m) in reality and as represented in the numerical model is much smaller than the scale of an estimated parameter block (1 m), so the inversion is unable to identify these features (see, e.g., Vesselinov et al. 2001, for another example of explicit treatment of small-scale features in an inversion). Run times for an individual MODFLOW simulation on a single core of a conventional desktop PC ranged from <2 min to 10-20 min. These run-times were largely dependent on the degree of heterogeneity in the parameter field during inversion, and on the rate of pumping and local rates of drawdown for a given test. Inversion In order to image the aquifer properties, we use the Bayesian-based geostatistical approach of Kitanidis and Vomvoris (1983) and Kitanidis (1995), with modifications for solving the optimization problem. The approach explicitly recognizes the desired balance of reproducing the data in a way that considers the noise in the measurements and other errors in the model while also having some constraints on the estimated parameter field solution. The relationship between the observations and the forward model can be expressed as y h(s) v , (2) where y is an n x 1 vector of all of the observations used in the inversion (i.e., all points selected as described Hochstetler et al. 2015-in review), s is the m x 1 unknown parameter field, h (s ) is the forward model that maps the parameter field to the simulated observations ( m n ), and v is a vector of errors that recognize both an imperfect model (i.e., h (s ) ) and errors in the measurements, where we expect v to be normally distributed with mean zero and a diagonal covariance matrix of uniform variance values (i.e., v ~ N (0, R ) and R R2 I ). In this work, the forward model is the set of MODFLOW models described above. The number of measurements used is n 3336 and the number of unknowns is m 216,513 (see Table 2 of Hochstetler et al. 2015-in review for overall size of the HT problem). The unknown parameter field was uniformly discretized into 1 m x 1 m x 0.6 m cells, which encompassed single or multiple MODFLOW grid cells if the location was away from or near the center of the model domain, respectively. The field s is assumed to be stationary with a mean that can be expressed by the product Xβ , where X is a m x p matrix of known drift functions and β is a p x 1 vector of unknown drift coefficients, and covariance given by Q . The goal is to find the parameter field that best fits the data while being plausible given what is understood about the problem. This is clear when considering the objective function to be minimized, L 1 1 (y h(s))T R 1 (y h(s)) (s Xβ)T Q 1 (s Xβ) . 2 2 (3) The first term of (3) considers how well the predicted measurements compare to the observations relative to the measurement error, and the second term compares structure of the parameter field relative to prior covariance. In the Bayesian context, the solution of s that minimizes the objective function L is the mode of the posterior distribution, commonly known as maximum-a-posteriori probability or MAP value. The quasi-linear geostatistical method is equivalent to a Gauss-Newton (G-N) approach to this nonlinear optimization problem. A 1st-order Taylor series expansion is used to approximate the nonlinear forward model at the best estimate ŝ with , which is assumed to be close to ŝ : (4) where is the n x m sensitivity matrix: . (5) We use the adjoint MODFLOW solver of Clemo (2007) to compute , where the time to do so is equivalent to the time to solve n 1 MODFLOW simulations. Considering (2) and(4), the measurement equation can now be written as . (6) Now, with the linearized approximation, an iterative approach of solving a linear system of equations based on the minimization of (3) is used for finding the best estimate of s . The system of equations is (7) and the best estimate of s for the current iteration is . Previous implementation of the quasi-linear geostatistical approach has included a line search between s and in order to ensure reduction in L at each iteration. Convergence is (8) declared when changes in estimated s are sufficiently small and further reductions in L are sufficiently small (see, e.g., Cardiff et al. 2012; 2013). Due to the highly heterogeneous nature of the site and highly nonlinear problem we used the modified Levenberg-Marquardt (L-M) approach to the geostatistical method (Nowak and Cirpka 2004). The L-M approach is a hybrid of the G-N and steepest-descent methods that works well for problems that are more strongly nonlinear (see, e.g., Pujol 2007). A pure implementation of L-M to our inversion problem would essentially be an increase in the magnitude of R2 (i.e., increase in the magnitude of the diagonal values of R ) in solving (7). Nowak and Cirpka’s (2004) modified L-M approach to geostatistical inversion considers the update of snew in terms of two parts: projection and innovation. The equations of (7) are then expressed as HQHT (1 )R HX ξ in y h(s) T , βˆ in 0 HX 0 (9) HQHT (1 )R HX ξ pr Hs . T βˆ pr 0 HX 0 (10) The best estimate at each iteration is given by snew X(βˆ in βˆ pr ) QHT (ξ in ξ pr ) . (11) In (9), is the L-M parameter and controls the step size. We set 1 + (1 )1.5 . For each iteration of the geostatistical approach, where we have an updated H and h (s ) , we start with 0 , solve equations and compute L . If this does not result in a reduction in L , then is increased and the step is repeated, otherwise, the snew becomes the s and we move on to the next iteration (updating the H and h (s ) ). Most iterations required values of 4, 8, or 16 for reduction of L . Finally, within this Bayesian framework, we can approximate the posterior covariance matrix as T 1 HQ HQHT R HX HQ P Q T . T 0 XT X (HX) (12) The square root of the diagonal elements of P provide uncertainty quantification in the form of a posterior standard deviation on the best estimates of s . In this paper, we are interested in imaging the heterogeneous K field, K (x) . We also solve for constant values of the storage coefficients S s and S y . Cardiff and Barrash (2011) demonstrated that for reasonable ranges of variation in storage parameters S s ( 1.3 10 6 m-1 - 1.2 104 m-1) and S y (0.11 – 0.012), assuming constant values for those parameters over the domain does not significantly impact estimates of the heterogeneous K field. However, we recognize that due to the nature of the aquifer explored, the results may indeed be sensitive to S s and S y . This is currently being investigated in follow-up work. Imaging The goal is to estimate the K field at this particular industrial site at a resolution that provides sufficient detail for potential source zone remediation. Using reasonable assumptions from descriptions in driller logs at two site wells and from proprietary modeling at site-wide scale, we formed a “prior” covariance matrix Q for the unknown K field using an exponential covariance model with correlation lengths of 10 m in the lateral directions and 2 m in the vertical. For this work, we evaluated the orthonormal residuals using the Q2 statistic (Kitanidis 1991) to find an adequate prior log10(K) variance of 3.1. Also, we considered several reasonable measurement error values, and we found R 1.8 mm produced the most accurate estimate based on the criterion of minimizing the cR statistic (Kitanidis 1991). Given the validation of the best estimate of the parameter field (see Figure 8 and Table 4 in Hochstetler et al. 2015-in review), we deemed a more formal evaluation of the correlation lengths unnecessary for the scope of this study. References Cardiff, M., and W. Barrash. 2011. 3-D transient hydraulic tomography in unconfined aquifers with fast drainage response. Water Resources Research 47: W12518. DOI:10.1029/2010WR010367 Cardiff, M., W. Barrash, and P.K. Kitanidis. 2012. A field proof-of-concept of aquifer imaging using 3D transient hydraulic tomography with modular, temporarily-emplaced equipment. Water Resources Research 48: W05531. DOI:10.1029/2011WR011704 Cardiff, M., W. Barrash, and P.K.Kitanidis. 2013. Hydraulic conductivity imaging from 3D transient hydraulic tomography at several pumping/observation densities. Water Resources Research 49, no. 11: 7311-7326. DOI:10.1002/wrcr.20519 Clemo, T. 2007. MODFLOW-2005 ground water model – User guide to the adjoint state based sensitivity process (ADJ). BSU CGISS Technical Report 07-01. Boise State University, Boise, ID. Harbaugh, A. 2005. MODFLOW-2005, the U.S. Geological Survey Modular Ground-Water Model – the Ground-Water Flow Process. U.S. Geological Survey Techniques and Methods 6-A16. U.S. Geological Survey, Reston, VA. Hochstetler, D., W. Barrash, C. Leven, M. Cardiff, F. Chidichimo, and P.K. Kitanidis. 2015-in review. Locating continuity and discontinuity of high-K and low-K zones with hydraulic tomography. Groundwater (manuscript GW20141021-0300). Kitanidis, P.K. 1991. Orthonormal residuals in geostatistics: Model criticism and parameter estimation. Mathematical Geology 23, no. 5: 741-758. Kitanidis, P.K. 1995. Quasi-linear geostatistical theory for inversing. Water Resources Research 31, no. 10: 2411-2419. Kitanidis, P.K., and E.G. Vomvoris. 1983. A geostatistical approach to the inverse problem in groundwater modeling (steady state) and one-dimensional simulations. Water Resources Research 19, no. 3: 677-690. Nowak, W., and O.A. Cirpka. 2004. A modified Levenberg-Marquardt algorithm for quasi-linear geostatistical inversing. Advances in Water Rseources 27: 737-750. Pujol, J. 2007. The solution of nonlinear inverse problems and the Levenberg-Marquardt method. Geophysics 72, no. 4: W1-W16. DOI: 10.1190/1.2732552 Vesselinov, V.V., S.P. Neuman, and W.A. Illman. 2001. Three-dimensional numerical inversion of pneumatic cross-hole tests in unsaturated fractured tuff 1. Methodology and borehole effects. Water Resources Research 37, no. 12: 3001-3017. Table S1. CMT observation locations in local coordinates. The elevations are the centers of the 15cm openings in the CMT channels. Name CMT1-1 CMT1-2 CMT1-3 CMT1-4 CMT1-5 CMT1-6 CMT1-7 CMT1-8 CMT1-9 CMT1-10 CMT1-11 CMT1-12 CMT1-13 CMT2-1 CMT2-2 CMT2-3 CMT2-4 CMT2-5 CMT2-6 CMT2-7 CMT2-8 CMT2-9 CMT2-10 CMT2-11 CMT2-12 CMT2-13 CMT3-1 CMT3-2 CMT3-3 CMT3-4 North (m) 47.35 47.35 47.35 47.81 47.81 47.81 47.92 47.92 47.92 47.92 47.92 47.92 47.92 48.69 48.69 48.69 48.18 48.18 48.18 48.34 48.34 48.34 48.34 48.34 48.34 48.34 58.86 58.86 58.86 58.92 East (m) 69.81 69.81 69.81 70.32 70.32 70.32 69.81 69.81 69.81 69.81 69.81 69.81 69.81 64.89 64.89 64.89 65.00 65.00 65.00 64.56 64.56 64.56 64.56 64.56 64.56 64.56 65.46 65.46 65.46 64.84 Elevation (m amsl) -13.875 -12.875 -11.915 -9.055 -7.005 -5.115 -4.325 -3.375 -2.385 -1.395 -0.895 -0.405 0.115 -13.865 -11.475 -11.875 -9.305 -7.26 -5.355 -4.255 -3.305 -2.325 -1.345 -0.845 -0.345 0.15 -13.945 -12.885 -11.9 -9.305 Name CMT3-8 CMT3-9 CMT3-10 CMT3-11 CMT3-12 CMT3-13 CMT4-1 CMT4-2 CMT4-3 CMT4-4 CMT4-5 CMT4-6 CMT4-7 CMT4-8 CMT4-9 CMT4-10 CMT4-11 CMT4-12 CMT4-13 CMT5-1 CMT5-2 CMT5-3 CMT5-4 CMT5-5 CMT5-6 CMT5-7 CMT5-8 CMT5-9 CMT5-10 CMT5-11 North (m) 58.53 58.53 58.53 58.53 58.53 58.53 62.79 62.79 62.79 63.18 63.18 63.18 62.77 62.77 62.77 62.77 62.77 62.77 62.77 54.46 54.46 54.46 54.42 54.42 54.42 53.97 53.97 53.97 53.97 53.97 East (m) 65.12 65.12 65.12 65.12 65.12 65.12 72.54 72.54 72.54 72.27 72.27 72.27 72.08 72.08 72.08 72.08 72.08 72.08 72.08 77.83 77.83 77.83 77.36 77.36 77.36 77.64 77.64 77.64 77.64 77.64 Elevation (m amsl) -3.165 -2.185 -1.17 -0.685 -0.195 0.285 -14.465 -13.475 -12.44 -9.21 -7.17 -5.285 -4.255 -3.325 -2.335 -1.345 -0.845 -0.365 0.145 -14.56 -13.575 -12.66 -9.03 -5.805 -5.17 -4.205 -3.115 -2.015 -1.155 -0.39 CMT3-5 CMT3-6 CMT3-7 58.92 58.92 58.53 64.84 64.84 65.12 -7.255 -5.385 -4.12 CMT5-12 CMT5-13 53.97 53.97 77.64 77.64 -0.21 0.285 Figure S1. Aerial view of industrial site with groundwater flow direction indicated by arrows. Inset shows the area surrounding HT testing and footprint of HT testing area (gray square – also see Figure S2). Black circles indicate barrier pumping wells and red circles identify monitoring wells that had data loggers recording water levels prior to and during the HT testing campaign. Note that pumping from barrier well PR01 was turned off seven days prior to, and for the duration of, HT testing. Figure S2. Overview of the testing area with identified features including: new pumping well (NPM01), pre-existing monitoring well (PM01), observation locations (CMTs), and relevant data collection systems. Figure S3. Hydrographs from three monitoring wells spanning the period of HT tests: SB41 (top), P6 (middle), and PC032 (bottom). SB41 is nearest to the HT testing site, while P6 and PC032 are further away, up gradient and down gradient, respectively (see Figure S1). Water levels are all relative to the level measured at 00:00 on 11 October 2013 for ease of comparison. The approximate periods during which hydraulic tomography (HT) pumping tests occurred on a given day are shown as shaded intervals for pumping tests from NPM01 (in aqua), the CMTs (in lime green), and PM01 (in gray). Note that the testing from PM01 was not described or used in this paper; those testing dates are shown for completeness. This figure shows daily cycles (two per day), several 5-7 day cycles, and a superimposed regional-scale downward trend. Figure S4. Hydrographs focusing on the daily trends in three monitoring wells: SB41, P6, and PC032. Water levels are all relative to the level measured at 00:00 on 23 October 2013 for ease of comparison. All monitoring wells show twice-daily fluctuations on the order of 0.01 m over 6 hours for a rate of approximately 5x10-7 m/s, which yields a water level change of << 0.001 m during a 15-minute period (i.e., the length of a pumping test). Figure S5. Drawdown observations from field validation pumping test from CMT3-2 on 15 October 2013 (blue), and the corresponding predicted drawdown using forward model with best estimated parameter field from inversion (red). Continued below. Figure S5. (Continued) Figure S6. Drawdown observations from field validation pumping test from CMT3-4 on 28 October 2013 (blue), and the corresponding predicted drawdown using forward model with best estimated parameter field from inversion (red). Continued below. Figure S6. (Continued) Figure S7. Drawdown observations from field validation pumping test from CMT1-2 on 28 October 2013 (blue), and the corresponding predicted drawdown using forward model with best estimated parameter field from inversion (red). Continued below. Figure S7. (Continued) Figure S8. Drawdown observations from field validation pumping test from CMT1-7 on 29 October 2013 (blue), and the corresponding predicted drawdown using forward model with best estimated parameter field from inversion (red). Continued below. Figure S8. (Continued) Figure S9. Drawdown observations from field validation pumping test from CMT1-4 on 29 October 2013 (blue), and the corresponding predicted drawdown using forward model with best estimated parameter field from inversion (red). Continued below. Figure S9. (Continued) Figure S10. Drawdown observations from field validation pumping test from CMT5-2 on 29 October 2013 (blue), and the corresponding predicted drawdown using forward model with best estimated parameter field from inversion (red). Continued below. Figure S10. (Continued)