3 Transient Response of Electrodes Full
advertisement

4B15 Introduction to Bioengineering
Electrodes and Transducers
Lecture 3: Transient Response of Electrodes
3.1 Transient Specification
In simple analogue interfaces and amplifiers it is practically impossible to
obtain the linear phase characteristic which is required to prevent distortion of a
signal. In an attempt to cater for this, early standards for electrocardiographs
gave an indication of the phase distortion which was acceptable. They did this by
stipulating that the phase shift introduced into the signal by the recording
system should be no more than that introduced by a single-pole, high-pass filter
having a cut-off frequency of 0.05Hz. This left some ambiguity surrounding the
effect this would have on an ECG signal, which is generally viewed in the time
domain for diagnostic purposes. In an effort to quantify the distortion in the
time domain more recent standards have indicated this in terms of the transient
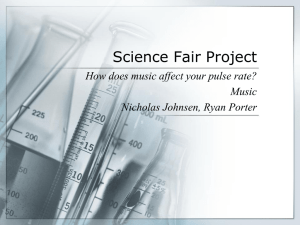
response to a narrow pulse as shown in Fig. 1. The distortion is specified in
terms of the maximum undershoot from the baseline at the end of the pulse
which can be tolerated and the maximum recovery slope from this undershoot
allowable. The specification is given for an input rectangular pulse of amplitude
3mV and duration 100ms. The maximum undershoot from the baseline at the
end of the pulse is limited to 100μV, while the maximum recovery slope is
limited to 300μVs-1. These values apply to the overall distortion in the ECG
introduced at any point in the recording system and therefore must be taken as
being referred to the input so that they are independent of variable amplifier
gain.
Fig. 1 The Transient Response Specification for ECG Recorders
1
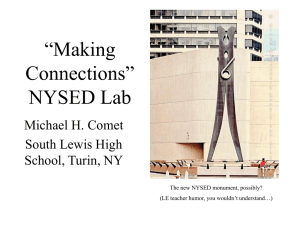
3.2 Transient Analysis
The same model can be used as before for the electrode amplifier interface
as shown in Fig. 2, with the sinusoidal source replaced with a pulse generator
intended to provide the pulse shown in Fig. 1.
RP1
iin
RS1
_П_
CP1
RP2
VS
Rin
Vin
Amplifier
RS2
CP2
Fig. 2. A Model of the Front End of the Recoding System
Again, the input impedance of the amplifier is taken as purely resistive and the
polarisation potential is neglected. Previously the steady-state response of this
set-up was described in the frequency domain as:
𝝎
(𝟏 + 𝒋 𝝎 )
𝑽𝒊𝒏
𝒁
=𝜶
𝝎
𝑽𝑺
(𝟏 + 𝒋 𝝎 )
𝑷
In order to evaluate the transient response the term ‘jω’ is replaced by the
Laplace operator ‘s’ so that:
𝒔
(𝟏 + 𝒛)
𝑽𝒊𝒏 (𝒔)
=𝜶
𝒔
𝑽𝑺 (𝒔)
(𝟏 + 𝒑)
where:
𝒛=
𝟏
𝑪𝑷 𝑹𝑷
𝒑=
𝟏
𝒛
=
𝜶𝑪𝑷 𝑹𝑷 𝜶
𝜶=
𝑹𝒊𝒏
𝑹𝒊𝒏 + 𝟐(𝑹𝑺 + 𝑹𝑷 )
so that:
𝟏
(𝒔 + 𝒛)
𝑽𝒊𝒏 (𝒔)
𝒑(𝒔 + 𝒛) (𝒔 + 𝒛)
𝒛
=𝜶
=𝜶
=
𝟏
𝑽𝑺 (𝒔)
𝒛(𝒔 + 𝒑) (𝒔 + 𝒑)
(𝒔 + 𝒑)
𝒑
2
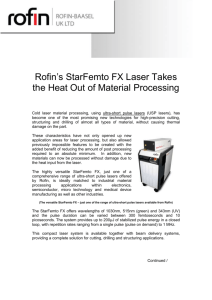
If the input pulse has an amplitude Vm and a duration T as shown in Fig. 2,
Vs(t)
Vm
0
T
t
Fig. 2 Input Test Pulse
it can be conveniently defined as a sum of two step functions so that:
𝑽𝒔 (𝒕) = 𝑽𝒎 𝒖(𝒕) − 𝑽𝒎 𝒖(𝒕 − 𝑻)
This has the Laplace transform:
𝑽𝒔 (𝒔) =
𝑽𝒎 𝑽𝒎 −𝒔𝑻 𝑽𝒎
−
𝒆
=
(𝟏 − 𝒆−𝒔𝑻 )
𝒔
𝒔
𝒔
The input voltage to the amplifier is then given in Laplace terms as the product
of the transform of the input pulse and the transfer-function of the electrodeamplifier interface so that:
𝑽𝒊𝒏 (𝒔) = 𝑽𝒔 (𝒔)
𝑽𝒊𝒏 (𝒔)
𝑽𝒔 (𝒔)
This gives:
𝑽𝒊𝒏 (𝒔) =
(𝒔 + 𝒛)
𝑽𝒎
(𝟏 − 𝒆−𝒔𝑻 )
(𝒔 + 𝒑)
𝒔
The proper polynomial fraction in the Laplace operator ‘s’ can be simplified by
partial fraction expansion:
(𝒔 + 𝒛)
𝑨
𝑩
= +
𝒔(𝒔 + 𝒑) 𝒔 (𝒔 + 𝒑)
(𝒔 + 𝒛)
𝑨(𝒔 + 𝒑) + 𝑩𝒔
=
𝒔(𝒔 + 𝒑)
𝒔(𝒔 + 𝒑)
(𝒔 + 𝒛)
(𝑨 + 𝑩)𝒔 + 𝑨𝒑
=
𝒔(𝒔 + 𝒑)
𝒔(𝒔 + 𝒑)
3
Comparing coefficients gives:
𝑨+𝑩=𝟏
𝑨=
;
𝒛 𝜶𝒛
=
=𝜶
𝒑
𝒛
𝑨𝒑 = 𝒛
𝑩=𝟏−𝑨=𝟏−𝜶
so that:
(𝒔 + 𝒛)
𝜶 (𝟏 − 𝜶)
= +
𝒔(𝒔 + 𝒑) 𝒔 (𝒔 + 𝒑)
The voltage at the input to the amplifier is the given in Laplace form as:
𝜶 (𝟏 − 𝜶)
𝑽𝒊𝒏 (𝒔) = 𝑽𝒎 (𝟏 − 𝒆−𝒔𝑻 ) [ +
]
𝒔 (𝒔 + 𝒑)
This expands to:
𝑽𝒊𝒏 (𝒔) = 𝑽𝒎
(𝟏 − 𝜶)
(𝟏 − 𝜶) −𝒔𝑻
𝜶
𝜶
(𝒆 )
− 𝑽𝒎 (𝒆−𝒔𝑻 ) + 𝑽𝒎
− 𝑽𝒎
(𝒔 + 𝒑)
(𝒔 + 𝒑)
𝒔
𝒔
Taking the inverse Laplace transform gives:
𝑽𝒊𝒏 (𝒕) = 𝑽𝒎 𝜶𝒖(𝒕) − 𝑽𝒎 𝜶𝒖(𝒕 − 𝑻) + 𝑽𝒎 (𝟏 − 𝜶)(𝒆−𝒑𝒕 )𝒖(𝒕)
−𝑽𝒎 (𝟏 − 𝜶)(𝒆−𝒑(𝒕−𝑻) )𝒖(𝒕 − 𝑻)
which simplifies to:
𝑽𝒊𝒏 (𝒕) = 𝑽𝒎 {[𝜶 + (𝟏 − 𝜶)(𝒆−𝒑𝒕 )]𝒖(𝒕) − [𝜶 + (𝟏 − 𝜶)(𝒆−𝒑(𝒕−𝑻) )]𝒖(𝒕 − 𝑻)}
When this expression is examined it can be seen to agree with the response
shown in Fig. 1 to the input rectangular pulse whereby the pulse when present
experiences some ‘droop’ in its transfer to the amplifier input, then some
undershoot of the baseline at the end of the pulse, finally followed by an
exponential recovery to the baseline.
When t=0 we have:
𝑽𝒊𝒏 (𝒕 = 𝟎) = 𝑽𝒎 {[𝜶 + (𝟏 − 𝜶)(𝒆𝟎 )]𝟏 − [𝜶 + (𝟏 − 𝜶)(𝒆𝒑𝑻 )]𝟎} = 𝑽𝒎
There is no initial attenuation of the pulse since we took R S << Rin previously,
which essentially ignores the small amount of attenuation caused by RS.
4
When 0 ≤ t < T we have:
𝑽𝒊𝒏 (𝒕) = 𝑽𝒎 [𝜶 + (𝟏 − 𝜶)(𝒆−𝒑𝒕 )]
This starts at a value of Vm when t = 0 and decays exponentially towards a value
of αVm. The exponential decay is governed by the pole time constant αCPRP. In
practice, the voltage never reaches its final value as the time constant associated
with the electrode components is much larger than the width of the pulse T of
100ms.
When t = T at the end of the pulse:
𝑽𝒊𝒏 (𝒕 = 𝑻) = 𝑽𝒎 {[𝜶 + (𝟏 − 𝜶)(𝒆−𝒑𝑻 )] − [𝜶 + (𝟏 − 𝜶)(𝒆𝟎 )]𝟏}
𝑽𝒊𝒏 (𝒕 = 𝑻) = 𝑽𝒎 {[𝜶 + (𝟏 − 𝜶)(𝒆−𝒑𝑻 )] − 𝟏}
𝑽𝒊𝒏 (𝒕 = 𝑻) = 𝑽𝒎 (𝟏 − 𝜶)(𝒆−𝒑𝑻 ) − 𝑽𝒎 + 𝜶𝑽𝒎
𝑽𝒊𝒏 (𝒕 = 𝑻) = 𝑽𝒎 (𝟏 − 𝜶)(𝒆−𝒑𝑻 ) − 𝑽𝒎 (𝟏 − 𝜶)
𝑽𝒊𝒏 (𝒕 = 𝑻) = −[(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )]𝑽𝒎
This describes the value of the pulse with the level of droop prevailing at the end
of the pulse at t = T with a subtraction of Vm volts as the pulse terminates. This
gives the value of the undershoot from the baseline at this time.
Finally, when t > T the voltage at the amplifier input is described as:
𝑽𝒊𝒏 (𝒕) = 𝑽𝒎 [(𝟏 − 𝜶)(𝒆−𝒑𝒕 ) − (𝟏 − 𝜶)(𝒆−𝒑(𝒕−𝑻) )]
Manipulating gives:
𝑽𝒊𝒏 (𝒕) = (𝟏 − 𝜶)𝑽𝒎 [𝒆−𝒑𝒕 − 𝒆−𝒑(𝒕−𝑻) ]
𝑽𝒊𝒏 (𝒕) = [(𝟏 − 𝜶)(𝟏 − 𝒆𝒑𝑻 )]𝑽𝒎 𝒆−𝒑𝒕
𝑽𝒊𝒏 (𝒕) = [(𝟏 − 𝜶)(𝟏 − 𝒆𝒑𝑻 )]𝑽𝒎 𝒆−𝒑𝒕 𝒆−𝒑𝑻 𝒆𝒑𝑻
𝑽𝒊𝒏 (𝒕) = [(𝟏 − 𝜶)(𝒆−𝒑𝑻 − 𝟏)]𝑽𝒎 𝒆−𝒑𝒕 𝒆𝒑𝑻
𝑽𝒊𝒏 (𝒕) = −[(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )]𝑽𝒎 𝒆−𝒑(𝒕−𝑻)
This describes the exponential recovery of the undershoot from the baseline
which is again governed by the pole time constant.
5
3.3 Maximum Undershoot Limitation
The value of the undershoot from the baseline at the end of the pulse is
given above as:
𝑽𝒊𝒏 (𝒕 = 𝑻) = −[(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )]𝑽𝒎
This can be expressed as a fraction of the pulse amplitude simply as:
𝑽𝒊𝒏 (𝒕 = 𝑻)
= −(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )
𝑽𝒎
The specification shown in Fig. 1 gives the undershoot limit as 100μV for an
input pulse amplitude of 3mV. This corresponds to a fractional value of 0.033 or
3.3%. In order to fulfil this requirement:
(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 ) < 𝟎. 𝟎𝟑𝟑
However, p = z / α so that:
𝒛𝑻
(𝟏 − 𝜶) (𝟏 − 𝒆− 𝜶 ) < 𝟎. 𝟎𝟑𝟑
A power series expansion for the exponential is given as:
𝒙𝟐 𝒙𝟑 𝒙𝟒
𝒆 = 𝟏+𝒙+ + + +⋯
𝟐! 𝟑! 𝟒!
𝒙
Using only first order terms the above inequality approximates to:
(𝟏 − 𝜶) (
𝒛𝑻
) < 𝟎. 𝟎𝟑𝟑
𝜶
(𝟏 − 𝜶)
𝒛𝑻 < 𝟎. 𝟎𝟑𝟑
𝜶
(𝟏 − 𝜶) 𝑻
< 𝟎. 𝟎𝟑𝟑
𝜶 𝑪𝑷 𝑹𝑷
Typical values for the electrode components for modern disposable, adhesive
electrodes have been given previously as RS = 50Ω, RP = 200kΩ and CP = 0.5µF.
With T = 100ms = 10-5 s we have:
(𝟏 − 𝜶)
𝟎. 𝟏
< 𝟎. 𝟎𝟑𝟑
𝜶 𝟎. 𝟓 × 𝟏𝟎−𝟔 × 𝟐 × 𝟏𝟎𝟓
6
(𝟏 − 𝜶)
< 𝟎. 𝟎𝟑𝟑
𝜶
𝟏 − 𝜶 < 𝟎. 𝟎𝟑𝟑𝜶
𝜶>
𝟏
= 𝟎. 𝟗𝟔𝟖
𝟏. 𝟎𝟑𝟑
Then:
𝜶=
𝑹𝒊𝒏
> 𝟎. 𝟗𝟕
𝑹𝒊𝒏 + 𝟐(𝑹𝑺 + 𝑹𝑷 )
which requires:
𝑹𝒊𝒏 > 𝟎. 𝟗𝟕𝑹𝒊𝒏 + 𝟏. 𝟗𝟒(𝑹𝑺 + 𝑹𝑷 )
𝟎. 𝟎𝟑𝑹𝒊𝒏 > 𝟏. 𝟗𝟒(𝑹𝑺 + 𝑹𝑷 )
𝑹𝒊𝒏 > 𝟔𝟒. 𝟕(𝑹𝑺 + 𝑹𝑷 )
With the values of RS = 50Ω, RP = 200kΩ as before this means:
𝑹𝒊𝒏 > 𝟏𝟐. 𝟗𝟒 𝑴Ω
Many ECG amplifiers use an input impedance of 10MΩ which is recommended
in the AHA standards. For the values of equivalent electrical components given,
this is inadequate to meet the maximum undershoot limitation. A value nearer to
20MΩ would be needed to ensure that the requirement is met. Electrodes with
higher values of components will need even higher amplifier input impedance.
3.4 Maximum Recovery Slope Limitation
The profile of the exponential recovery of the voltage after undershoot at
the end of the pulse at the amplifier input is described by:
𝑽𝒊𝒏 (𝒕) = −[(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )]𝑽𝒎 𝒆−𝒑(𝒕−𝑻)
The slope of this profile is found as:
𝒅𝑽𝒊𝒏 (𝒕)
= [(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )]𝑽𝒎 𝒑𝒆−𝒑(𝒕−𝑻)
𝒅𝒕
7
When t = T this has a value:
𝒅𝑽𝒊𝒏 (𝒕)
= [(𝟏 − 𝜶)(𝟏 − 𝒆−𝒑𝑻 )]𝒑𝑽𝒎
|
𝒅𝒕 𝒕 = 𝑻
If the exponential term above is approximated by the first order terms of an
expansion as before the expression becomes:
𝒅𝑽𝒊𝒏 (𝒕)
= (𝟏 − 𝜶)𝒑𝟐 𝑻𝑽𝒎
|
𝒅𝒕 𝒕 = 𝑻
With p = z / α = 1 / αCPRP this becomes:
(𝟏 − 𝜶)
𝒅𝑽𝒊𝒏 (𝒕)
= 𝟐
𝑻𝑽
|
𝒅𝒕 𝒕 = 𝑻 𝜶 (𝑪𝑷 𝑹𝑷 )𝟐 𝒎
The pulse defined in Fig. 1 has the properties Vm = 3mV and T = 100ms and with
the values of the electrode components as before, RP = 200kΩ and CP = 0.5µF:
(𝟏 − 𝜶)
𝒅𝑽𝒊𝒏 (𝒕)
= 𝟐
× 𝟎. 𝟏 × 𝟑 × 𝟏𝟎−𝟑
|
−𝟔
𝟓
𝟐
𝒅𝒕 𝒕 = 𝑻 𝜶 (𝟎. 𝟓 × 𝟏𝟎 × 𝟐 × 𝟏𝟎 )
which gives:
(𝟏 − 𝜶) 𝟑 × 𝟏𝟎−𝟒 (𝟏 − 𝜶)
𝒅𝑽𝒊𝒏 (𝒕)
=
=
× 𝟑 × 𝟏𝟎−𝟐
|
𝒅𝒕 𝒕 = 𝑻
𝜶𝟐
𝟏𝟎−𝟐
𝜶𝟐
The limit of the recovery slope as specified in Fig. 1 is given as 300μVs-1. This
requires:
(𝟏 − 𝜶)
× 𝟑 × 𝟏𝟎−𝟐 < 𝟑 × 𝟏𝟎−𝟒
𝟐
𝜶
so that:
(𝟏 − 𝜶)
< 𝟏𝟎−𝟐
𝜶𝟐
Inverting gives:
𝜶𝟐
> 𝟏𝟎𝟐
(𝟏 − 𝜶)
This requires a value of α which is very close to unity. In this case α → 1 so that
α2 ≈ α. Then the requirement can be approximated as:
8
𝜶
> 𝟏𝟎𝟐
(𝟏 − 𝜶)
𝜶 > (𝟏 − 𝜶) × 𝟏𝟎𝟐
𝜶(𝟏 + 𝟐) > 𝟏𝟎𝟐
𝜶>
𝟏𝟎𝟎
> 𝟎. 𝟗𝟗
𝟏𝟎𝟏
This means:
𝜶=
𝑹𝒊𝒏
> 𝟎. 𝟗𝟗
𝑹𝒊𝒏 + 𝟐(𝑹𝑺 + 𝑹𝑷 )
𝑹𝒊𝒏 > 𝟎. 𝟗𝟗𝑹𝒊𝒏 + 𝟏. 𝟗𝟖(𝑹𝑺 + 𝑹𝑷 )
𝟎. 𝟎𝟏𝑹𝒊𝒏 > 𝟏. 𝟗𝟖(𝑹𝑺 + 𝑹𝑷 )
𝑹𝒊𝒏 > 𝟏𝟗𝟖(𝑹𝑺 + 𝑹𝑷 )
With the values of RS = 50Ω, RP = 200kΩ as before this means:
𝑹𝒊𝒏 > 𝟑𝟗. 𝟔 𝑴𝛀
This places significant demands on the design of the amplifier input stage.
9