Report - University College London
advertisement

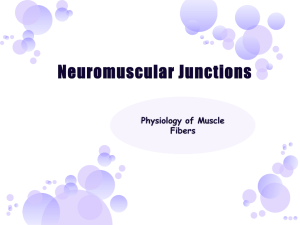
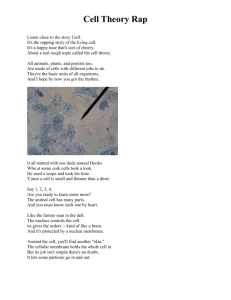
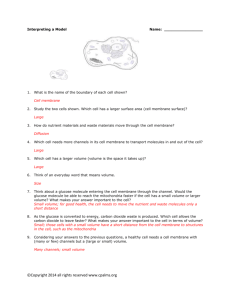
Tracking the Plasma membrane in order to locate the developing actin cortex during Blebbing Introduction In this project, cortical reassembly in blebbing cells was studied. Blebs are initially devoid of an actin cortex and so provide a good model system to study it’s reassembly. Advances have been made in determining the causes of blebbing, the order in which proteins are recruited to blebs and finding the biochemical key players responsible for reassembling the cortex. However, a lot is still unknown about the assembly and dynamics of actin filaments in the cortex. The aim of the current project as a whole is to track actin monomers as they move through the reassembling cortex in blebs to try to learn more about the kinetics of polymerisation in the construction of the cortex. In order to track actin monomers, speckle microscopy is used. This involves injecting cells with very low amounts of actin binding green fluorescence protein (GFP) so that only a few actin monomers become tagged and fluoresce. Since each monomer is only tagged by one GFP molecule, the speckles that are seen are very faint and, therefore, very difficult to track. The aim of this case presentation within this larger project was to provide extra information about the probable location of the actin monomers by tracking and studying the motion of the plasma membrane. The actin monomers in the reassembling cortex tend to move parallel to the plasma membrane and remain close to it. By knowing the location of the membrane as the bleb retracts, more information about the likely location of the actin filaments can be introduced to the speckle-tracking program and so they should become easier to follow more accurately. Furthermore, when analysing the actin motion data, this will allow de-convolution of the motion of the actin from the motion of the bleb as a whole. From the motion of the actin, and the nucleator which attaches to the barbed end of the filament, we can learn about the kinetics of polymerisation. The plasma membrane Figure 1: The plasma membrane, comprised of a lipid bilayer with embedded proteins and protein complexes. (taken from ‘http://www.freewebs.com/ltaing/homogenization.htm’) The plasma membrane separates the cell interior from the external environment1. It consists of a lipid bilayer embedded with proteins and protein complexes that, together, can be considered to be a 2-dimensional fluid2. As well as isolating the interior of the cell, it is involved in signalling, transport of necessary proteins and plays a role in attaching the cell to the external matrix in cell movement and grouping1. Alone the membrane provides little rigidity and cannot maintain cell shape. Mechanical support is provided by an underlying cytoskeleton to which the membrane is anchored1,3. Actin filaments and the cytoskeleton Figure 2: Fluorescence images of mouse fibroblasts showing microtubule and actin cytoskeletons by Jan Schmoranzer (taken from ‘http://www.maths.bris.ac.uk/~matbl/research/biophys.html’) The cytoskeleton is a mesh of actin microfilaments, intermediate filaments and microtubules contained in the cytoplasm that gives the cell shape and structure1. Actin microfilaments, which are composed of linear polymers of actin, are the thinnest of the filaments. They generate force by elongating their leading edge whilst depolymerising at the rear resulting in net movement. The Rho family of GTPases control actin structures, for example during contraction which is controlled by Rho itself (see section on blebbing) or when creating protrusions (e.g. Cdc43 and Rae)1. The actin cortex Figure 3: f-actin fibers in the cortex (Taken from ‘http://web.uvic.ca/~rburke/burkelab/integrins.htm’) A thin gel known as the cell cortex lies beneath the membrane. It is 100nm to 500nm thick and primarily composed of cross-linked actin filaments, myosin and actin binding proteins1,4. It is the main cellular component affecting cell shape and providing rigidity in animal cells1. Myosin molecular motors can exert forces on the cortex that allow the cortical cytoskeleton to contract and reshape when required for various cellular processes1. It is thought that spectrin is responsible for the cross-linking of the actin filaments, which increases the rigidity of the cortex1,5. Attachment proteins connect the actin network to transmembrane proteins keeping the membrane bound1. The actin cortex increases the rigidity of the membrane 5fold, protecting the bleb against external forces6. Protrusions of the plasma membrane can occur under the control of the underlying cytoskeleton where the membrane is pushed outwards by microtubules (e.g. cilia) or actin filaments (e.g. filapodia, lamellipodia). Furthermore contraction of the cortex can lead to the protrusions studied in this project, known as blebs. Contractions of the cortex are required in lamellipodial motility in order to detach the cell rear from the substrate and pull the cell forwards14. Furthermore, as well as this conventional form of motility, many types of cell, including metastatic cancer cells, can migrate through two alternative methods that rely on cortical contraction for initiation of blebbing, as well as retraction of the cell body12,52. These methods of directed motility are important since they allow metastatic cancer cells to escape drugs. This is because these forms of motility don’t require proteolytic degradation of the surrounding matrix9-13. The cortex is also essential for several other cellular processes including cytokinesis and morphogenesis as well as any process requiring the cell to respond to or create forces7,8. Understanding its structure, assembly and behaviour is therefore important. A brief review of the role of cortical contractility in cellular processes is given in appendix A. Blebbing Blebs are spherical protrusions of the plasma membrane from a cell that last of the order of minutes and extend to around 2μm long. They differ from other types of protrusion (e.g. filopodia, lamellipodia and podosomes) in that they are not formed as a result of actin polymerisation pushing the protrusion outwards15. Instead they result from the plasma membrane locally separating from the actin cortex, causing cytosol to rush into the gap which in turn pushes the membrane outwards. Polymerisation of actin does, however, occur in order to stop expansion and an actomyosin cortex is generated to retract the bleb16-18. Blebs have historically been associated with apoptosis but are also seen in healthy cells, for example during cytokinesis19, cell spreading20,21 and movement in tumour and embryonic cells22. During apoptosis, two types of blebbing are seen. The first are similar to those seen in healthy cells23 whilst the second do not result from acto-myosin contractions and are larger and do not retract24. Since blebs initially do not contain actin and reassemble a cortex throughout the blebbing cycle, they are a useful tool for studying cortical actin nucleation and the mechanics and assembly of the cortex. Furthermore, blebbing is often used as a reporter of high cortical contractility since this is a major factor in their formation52. Figure 4: Blebbing (Taken from ref. 9) The membrane separates from the cortex due to either a rupture or an increase in hydrostatic pressure. Cytosol rushes into the gap causing the bleb to expand outwards. This expansion is halted as an actin cortex begins to reform. Finally the newly assembled cortex contracts until the bleb re-joins the bulk of the cell. The Bleb Cycle 1. Initiation Blebs can be initialised through two different mechanisms, both of which result from myosin driven contraction of the actin cortex. In the first of these, the cortex is ruptured as a result of the increased tension25. The second involves separation of the plasma membrane from the cortex as the cortex contracts inwards, increasing the pressure in the cell17. This pressure causes cytosol to push through the porous cytoskeleton to detach the membrane from the cytoskeleton. Blebs have been shown to occur more frequently where the membrane is weaker16, 26 and so it is possible that, as well as the pressure increase, a change in the level of proteins related to cortex-membrane attachment may be required in order to detach the membrane from the cortex. PIP2 has been suggested since a decrease in cortex-membrane adhesion results from loss of PIP227. If the Rho-ROCK-myosin cascade is inhibited at any level in a cell, blebbing does not occur12, 17, 18 28, 29 demonstrating that the cortical contraction required for blebbing acts under control of this cascade with myosin as the motor protein driving contractility. Myosin light chain is directly phosphorylated by ROCK (Rho-associated kinase), which in turn is activated by Rho. ROCK also inhibits Myosin light chain dephosphorylation and so also prolongs Myosin II activation30. It has been shown that the hydrostatic pressure differences generated as a result of the cortical contraction wouldn’t have time to redistribute throughout the cell before blebbing occurs. Furthermore, localised addition of drugs leads to changes in blebbing only in the treated area. Therefore, initiation of blebbing is a local effect depending on local hydrostatic pressures and cortical tensions17, 31. 2. Growth In the next step, cytosol pushes against the membrane causing it to inflate outwards to form a spherical protrusion by flowing through the pores and holes in the cytoskeleton. This inflation also causes further tearing of the membrane from the cytoskeleton, increasing the size of the bleb’s rim32. This process of expansion lasts roughly 30 seconds. The increase in the size of the membrane as it balloons outwards from the cell cannot be explained through unfolding of the membrane wrinkles and tearing at the rim alone. This is because the perimeter to base ratio of the bleb increases with time whereas a roughly linear relationship between the two would be expected if the extra membrane was entirely due to unfolding32. The additional membrane could result from the flow of lipids in the membrane through the bleb neck. In other contexts the flow of lipids in membranes has been observed so this is possible33, 34. A lipid flow of 2 micrometres per second would be required to account for the discrepancy and there is no evidence that this happens32. Another possible explanation is the fusion of vesicles to the bleb membrane, but there is no evidence that this occurs and no fusion with vesicles could be observed when imaged with lipid markers35. It is possible that, while blebs appear to initially have no actin cytoskeleton, they may have an erythrocytic cytoskeleton throughout growth. The mechanical properties of the membrane are similar to that of red blood cells, which have an erythrocytic cytoskeleton6, 36. Furthermore, protein 4.1 and ankrin (components of the erythrocytic cytoskeleton) are both localised to the membrane throughout growth37. 3. Slowing and reassembly of the cortex As inflation slows, a new cortex begins to form beneath the bleb plasma membrane, formed from a mesh of actin and myosin, which, in turn can begin to contract17. It has been shown that regrowth of the actin cortex is triggered by recruitment of nucleators rather than alternatives such as growth of the cortex into blebs from the sides or regrowth stemming from actin templates stuck to the membrane38. The cortex at the base of the bleb also disassembles at roughly the same time and it is unclear both what causes this disassembly as well as whether actin from this is recycled in the new cortex. In the paper ‘Reassembly of the contractile actin cortex in cell blebs’ (Charras et al, 2006)37, the sequence of proteins recruited to the forming bleb cortex is studied. It is shown that the retraction of a bleb results from a sequential assembly of actin-membrane linker proteins (such as ezrin), actin, actin bundling proteins, regulatory proteins and lastly myosin motor proteins. In ‘The cellular cortex is a composite of two independently nucleated actin networks’ (Bovellan et al, 2012) it is shown that that two independently acting proteins, Arp2/3 and Diaph1, are responsible for nucleating the bulk of the actin cytoskeleton38. These contribute roughly equal amounts of actin to the cortex, but Diaph1 works 5 times more quickly38. The regrowth of the cortex, the recruitment of proteins and the role of the 2 nucleators are discussed in more detail in Appendix B. Secondary blebs can occasionally protrude out from an existing bleb during cortex creation and retraction. These could be caused by the increased pressure in the cytosol as a result of contraction or the increased tension causing rupture in the bleb32. 4. Retraction The bleb shrinks as the newly formed cortex undergoes myosin driven contraction until the bleb membrane re-joins the bulk cell membrane and all of the cytosol is pushed back into the cell body. The process of retraction takes around 2 minutes. It is unknown whether the bleb cortex joins the existing cell cortex or whether it is depolymerised and a new cortex is assembled which links more strongly with the rest of the cell. Speckle microscopy for studying the assembly of an actin cortex Speckle microscopy is useful for studying the motion of individual proteins or molecules in a cell. In conventional fluorescence microscopy, used for studying the overall motion and behaviour of groups of molecules, as much fluorescing protein as possible is injected into the cell. However, speckle microscopy involves using very little fluorescing protein so that only a few of the molecules of interest show in an image. Each spot of light in an image then corresponds to only one of the molecules being studied and so the behaviour of individual molecules can be determined. Tracking these speckles can be challenging and so an appearance model telling the tracking program what the speckle should look like is combined with a motion model telling the program where the speckle is most likely to be. The aim of this case presentation was to analyse conventional fluorescence microscopy images of the plasma membrane in order to provide extra information for the motion model when speckle microscopy is used to follow individual actin filaments in the developing cortex. Snaking was used to track the membrane through images. As described in the introduction, this would also allow us to separate the motion of the actin and the actin nucleator sitting at the barbed end of the filament from the motion of the bleb as a whole, allowing us to learn about the kinetics of polymerisation. Single molecule fluorescence imaging has been used to further knowledge in many areas of biology, including tagging single actin molecules in filaments which has helped, for example, in studying lamellipodia43-47. In ‘Actin polymerisation-driven molecular movement of mDia1 in living cells’ (Higashida et al, 2004)78 a similar technique was used to study the formin mDia1. By studying the motion of the formin and of actin in the cell, it was discovered that formins have the ability to attach to the extending end of actin filaments and so can move without the use of molecular motors. A review of the role of formins in actin polymerisation is given in ‘Formins: processive cappers of growing actin filaments’ (Watanabe and Higashida, 2004)79 Snaking48, 49 The first step of any feature detection is to produce a feature map. This shows how likely it is that each pixel is placed on the feature of interest. To construct this, a convolution is usually performed between a small prototype image of the feature (e.g. a strong gradient or a v-shaped intensity function) and the image in which the feature is being sought, in order to give a pixel-by-pixel map of the likelihood that each pixel is placed on the feature. There must then be some process of deciding the location of the feature from these probabilities and in low-level image analysis a cut off is usually used. Active contours or “snakes” offer an improvement over low-level image analysis in that the properties that the feature boundary must be continuous and smooth are imposed onto the image rather than hoping they will come from the data alone. These properties are important to ensure the tracked outline of the membrane is realistic and complete. A snake is an elastic continuous flexible curve or rod, which tries to move and bend in order to fit the feature of interest, in our case the blebbing membrane. As well as finding a feature in one image, snakes can be used to track a moving object in a series of images, which will allow the membrane to be followed as it retracts. These snakes are referred to as dynamic contours. Snakes are deformable curves r(s) which move and bend over a feature map F in order to maximise the response of F(r(s)) over the length of the curve (0≤s≤1) without breaking the elastic properties imposed upon them. The problem is formalised as if an elastic rod were moving within some external potential energy field in which this external field is defined by the feature map. The external forces are countered by those stemming from the internal potential energy of the rod which aim to preserve smoothness. In equilibrium the system is characterised by the equation: 𝑑(𝑤1 𝑟) 𝑑 2 (𝑤2 𝑟) ( − ) + ∇𝐹 = 0 𝑑𝑠 𝑑𝑠 2 When this system is solved iteratively, the snake will move towards ridges on the feature map. The constants w1 and w2 control the elasticity and stiffness respectively and can be adjusted to include prior knowledge of the system. They can also be allowed to vary with s (along the snake) although, since the mechanical properties of the membrane do not greatly change around a bleb, this was not necessary in this project. In practice, computations are performed in discrete space. This involves approximating the continuous line with a series of points s=si, i=1…N, spread at equal intervals Δs along its length. The first and second order spatial derivatives can then be calculated using finite difference equations: 𝑑𝑟(𝑠𝑖 ) 𝑟𝑠 (𝑠𝑖+1 ) − 𝑟𝑠 (𝑠𝑖−1 ) = 𝑑𝑠 2∆𝑠 𝑑2 𝑟 𝑟𝑠 (𝑠𝑖+1 ) − 2𝑟𝑠 (𝑠𝑖 ) + 𝑟𝑠 (𝑠𝑖−1 ) = 𝑑𝑠 2 ∆𝑠 2 The more complex finite element method can also be used. This treats the points r(si) as nodes from which the full continuous curve can be reconstructed. For example, spline curves can be used which are especially computationally efficient since they automatically maintain smoothness. Spline curves are reviewed in Appendix C. For dynamic contours, such as the retracting bleb membrane, the feature map varies with time, and therefore, so must the positioning of the snake. The snake must follow the peak response as it moves between images. The equation of motion for the snake in this case becomes: 𝑑𝑟 𝑑(𝑤1 𝑟) 𝑑 2 (𝑤2 𝑟) 𝑑2𝑟 (𝛾 − + ) + ∇𝐹 = 𝜌 2 𝑑𝑡 𝑑𝑠 𝑑𝑠 2 𝑑𝑡 In which 𝜌 is the mass density and the term containing this corresponds to the inertia in the system whilst 𝛾 is the viscous resistance and this term dictates the viscosity. The new coefficients can also be used to include prior knowledge into the system. Through this equation, the position and motion of the snake in previous frames can be used to predict the position of the feature in the next frame. This prediction can then be combined with the actual image data to best locate the feature of interest. Using Snaking to track the plasma membrane in blebbing cells The snaking program An existing snaking program named ‘Snake: Active Contour’ (Dirk Jan Kroon, 2010)50 was used in order to track the membrane in the images, although this was modified extensively throughout the project. This roughly follows the procedure described above. The program requires the user to input a feature map, some initial points giving the rough location of the snake and various parameter values. It then outputs 100 points defining the location of the membrane in the image. Unfortunately it requires that the snake is a closed loop while the bleb membrane is a curved arch. This is a general feature of snaking rather than a fault of the program itself since the elasticity term in the snake equation favours smaller gaps between each point. If the loop were not closed, all of the snake points would come together. The only alternative would be to find a method that calculates exactly where the bleb membrane joins the bulk cell membrane in every image and then fix the ends of the snake at these points. This could be done in future work if greater accuracy is required but, in the timeframe of this 6-week project, a closed loop snake was used. Finding a feature map The snake program required a feature map as an input and so the first task was to find a suitable way of creating the feature map for each image. A feature map of an image is a second image that defines how likely it is that the feature of interest (the membrane) is in each pixel (see snaking section). Since the images used in this project were of cells in which the membrane had been tagged with fluorescent protein, the brightness of a pixel already corresponded, to some extent, to the likelihood of that pixel showing membrane and therefore, as an initial method, intensity alone was used. A lot of smoothing was applied to the images in order to remove the noise. It was hoped that this would also smooth out the membrane so that, instead of just have a thin line of bright pixels surrounded by dark, there would instead be a gradient of brightness for the snake to follow towards a maximum brightness at the membrane. However, when a feature map created in this way was used in the snake program, the membrane was not well tracked. This was tried for several different values of the snake parameters, but a force field that moved the snake towards the membrane could not be found. Since smoothing of the original images had failed to work sufficiently well, a more complex method of calculating the feature map had to be found. A program named ‘An Unbiased Detector of Curvilinear Structures’ (Steger, 1996)51 was used. A full description of this program can be found in the paper51. However it essentially works by, firstly, calculating the Hessian (the matrix of second spatial derivatives) at every point. At each point, it then finds the eigenvector corresponding to the largest eigenvalue of the Hessian. This points in the direction in which the intensity change is greatest. If the change in intensity is very large, this point may mark the edge of a membrane. The program then checks if the neighbouring pixels also show a large change in intensity since this would be expected if the point did lie on a membrane. The second eigenvalue points perpendicular to the largest change in intensity, which can be used to follow around the edge of the membrane giving an outline (fig5a). A line drawn though the center of this outline should, therefore, follow the center of the membrane (fig5b). Figure 5: a - left) The outline of the plasma membranes in a blebbing image as detected using ref. 51, b - right) A line following the membrane taken from the same program. This method doesn’t enforce the properties of elasticity and continuity and so, zigzagged and sometimes broken lines are given. This method could therefore not be used alone to track the membranes. It does however give a good outline for the snake to follow. The distance transforms of the outputs from this program were used as the feature map. The distance transform replaces the value of each nonmembrane pixel in a binary image with a value corresponding to its proximity to the nearest membrane. Since the distance transform provides a simple continuous gradient towards the position of the membrane, the Gaussian derivative methods used in the snake program were no longer needed and, in fact, made results worse. A more simple 0 1 0 method was written which simply convolved the image with the [1 0 −1] 0 −1 0 matrix. This ensured the snake was always moving towards the maximum likelihood curve. This method located the membrane well, and figure 6 shows a bleb membrane with the snake overlaid. A range of values were used for the various snake parameters and the values which best fitted the membrane whilst giving a smooth curve were chosen (when judged by eye, see later for rigorous error analysis). When tracking the membrane in an image, the snake program needed to be initialised by the user clicking roughly around the membrane. The snake could find the membrane well, even if initialised relatively far from the membrane. Figure 6: The membrane of a bleb that has been located by the snaking program. Tracking the membrane through time Since the program could now locate the membrane of a bleb in a single frame when given rough coordinates by the user, the next step was to get the snake to track the membrane through several frames. To do this, a script was written which uses the output from the previous frame as the initialisation of the next frame. In its most automated form, the program follows the snake until the area of the snake becomes smaller than some specified cut-off (default 100 pixels). However, an option can be used in which, instead of calculating if the bleb has retracted from the area, the script instead asks the user every 5 frames if the bleb has fully retracted. A second option can also be used which asks the user every 5 frames if the snake is successfully following the bleb. If the user says the tracking has gone wrong, they can reinitialise the snake. Once the snake has been reinitialised, the program also goes back and corrects the last few frames. It does this by assuming a linear transition of the snake points between the last frame that the user had stated to be well tracked and the current reinitialised frame. Movie 1: A video showing the snake track a bleb as it retracts. The pictures are at 25second intervals. The frame rate of the original movies was 5s and every 5th frame is shown. Calculating the Dynamics of individual points on the snake The next step was to try to characterise how each small segment of membrane moved throughout the blebbing cycle. To do this, the program was modified so that it could follow individual points on the snake through frames. This was more complicated than simply presuming the nth point on the snake in frame 1 moves to the nth point on the snake in frame 2 and so on. This is because the points may rotate around the snake as it contracts. Furthermore, points are not evenly spaced around the snake but instead localise more to the regions of the snake where the feature map values are larger. In order to overcome the latter of these problems, the points themselves were not directly used, but instead were used as control points for fitting spline curves to the snakes. New points were then sampled at evenly spaced intervals from these curves. These intervals could be made very small by sampling many points. Spline curves are described in Appendix C. This still left the problem that the points may rotate throughout the frames. A method was written to calculate which point in each frame corresponded to the same point in the first frame. This involved rotating each set of re-sampled snake points to find the configuration in which they most closely matched the snake points in the first frame. The similarity was calculated by summing the squared distance between corresponding points on the two snakes. Movie 2: Following the motion of individual points on the snake in movie 1. Calculation of the error in the tracking Now that a program had been developed that allowed the membrane to be tracked when judged by eye, a more vigorous method of calculating the error in tracking was written. This is described in detail in Appedix D. For 5 movies, 3 repeat trackings were compared with manually drawn curves to get an average difference in pixels. For 4 of the 5 curves the tracked curve points were, on average, less than 1 pixel from the manually clicked curve and therefore within the error bars of the manually clicked curve. For the final curve, for the majority of frames the membrane was well tracked. However for a roughly 20-frame period an adjacent, brighter membrane was tracked instead of the correct membrane leading to a higher error. This suggests that, whilst the code works well in most situations, a limitation of the code is that it may become inaccurate if a second bright membrane comes close to the one it should be tracking. The area of blebs through the blebbing cycle Figures 12 a and b show the area of the bleb cross sections from movies 3 and 7 (Appendix D) plotted against time. Rapid expansion is seen for the first 30 seconds as cytosol rushes into the gap between the cortex and the membrane. As the cortex begins to reassemble, expansions slows and a peak is reached at around 100s for the first larger (16μm2) bleb cross-section and at around 50s for the second smaller (7 μm2) bleb cross-section. Next, the slow retraction begins as the newly assembled cortex contracts. After around 3μm2 the bleb areas fell below the minimum number of pixels and were no longer tracked. Through this phase the larger bleb cross section shrank at a rate of around 0.05μm2/s while the smaller shrank at a rate of roughly 0.03μm2/s. It is worth noting that these are crosssections and different rates and sizes may be seen if the blebs were studied in a different plane, but the general behaviour should be the same. Figure 12 a b: The area of the bleb cross sections shown in a) movie 3 and b) movie 7 plotted against time. In ‘coordination of Rho GTPase activities curing cell protrusions’ (Machacek et al, 2009)80 the start of expansion and the start of retractions of lamellipodia were used as reference points to align the expression patterns of 3 different GTPases (RhoA, Rac1 and Cdc42) imaged separately. Expression levels were compared with edge velocities of the expression area. This allowed them to study the spatial and temporal behaviour of the 3 proteins at the same time, overcoming the difficulties involved with simultaneous imaging of different proteins. They found the location of the maximum expression of the proteins relative to the membrane as well as the timing of their expression relative to protrusion events. This could be another use of the code. The program has been used in this project to track the line marking the maximum expression of proteins, rather than the leading edge of an expression area. However, the program defining the feature map already has an option to give an area of expression, rather than a ridge defining maximum expression and so this could be used instead. This paper also used the level-set method as a particularly mathematically rigorous method of determining which section of the leading edge in one frame corresponded to each section in the previous frame. An original secondary aim of my project was to use level set in a similar way to track points on the membrane with time. The level set method is particularly useful for biological uses since it deals well with edges that change in a complex manner with time. However, due to time constraints, this was left for future work. As described earlier, a simpler method was used instead based on simply sampling the membrane curves with a large number of points. The points on each frame were then rotated until they gave the shortest summed distance to the points on the first frame. Each point could then be tracked through images and used to define how each particular section of membrane moved in time (movie 2). This method should work well for membranes whose shape remains qualitatively similar, i.e. if the area of bleb remains one smooth ‘blob’. Since the blebs membranes were tracked using snaking, which enforces smoothness and continuity, they in general evolved in a fairly simple manner. This method may have limitations if tracking unusually shaped blebs, or if the cut off area is set very low so that the bleb is tracked as it collapses back into the cell. A thorough description of the level set method along with it’s application to tracking points on curves representing GTPases in lamellipodia is given in ‘Morphodynamic profiling of protrusion phenotypes’ (Machacek and Danuser, 2006)81. A description of it’s application to modelling cellular deformations as well as its use in a more predictive setting is given in the paper ‘Modeling cellular deformations using the level set formalism’ (Yang et al, 2008)82. A review of the level set method is given in Appendix E. APPENDIX -A Examples of actin cortex contraction and instability in cellular processes Actin cortex contraction in lamellipodial motility Lamellipodial motility is the most studied type of cell motion. It involves a three-step cycle53 in which firstly, a protrusion forms at the front of the cell. Unlike blebs, this type of protrusion, the lamellipodia, requires actin polymerisation induced by Rac or Cdc42 localised at the leading edge of the cell54, 55. Next, the cell adheres to the surrounding substrate before, finally, myosin motors contract the cortex at the rear of the cell propelling the nucleus and cytoplasm forwards into the protrusion56-58. Due to the substrate adhesions, this leads to net movement of the cell. The cortex contractility is induced by Rho GTPases as described in the blebbing section. Understanding actomyosin assembly and contraction is therefore not only important for understanding amoeboid motility but also for understanding lamellipodial motility. It is thought that the microtubule system could be responsible for ensuring that the proteins inducing polymerisation localise to the leading edge of the cell whilst the Rho remains localised to the rear59, 60. Actin cortex contraction in amoeboid motility The two alternative methods of motility (studied by Sahai and Marshall, are based on the bleb cycle and depend upon cortical contraction both to create the protrusion and to pull the cell body forwards25. As described in the ‘blebbing cycle’ section, enhanced acto-myosin contractility can lead to either cortex rupture as a result of cortical instability or the separation of the membrane of the cortex. Both of these lead to the membrane expanding outwards as cytosol flows into the gap. The first method of motility arising from this involves one large bleb expanding out, followed by cortical contraction at the rear of the cell and reassembly of a cortex in the bleb, similar to lamellipodial motility52, 12. Under normal conditions the cortical contractility is not strong enough to push the nucleus through the bleb rim52. However, in conditions of enhanced contractility (either natural12, 61 or artificially induced62, 63, 64) the nucleus no longer limits motion and 200312) contraction waves are seen13, 52, 65, 66. Due to adhesions of the membrane to the surrounding matrix this leads to net propulsion in the cell. The alternative form of motility that arises as a consequence of enhanced contractility, involves the formation of many blebs at the leading edge of the cell. This method of motility, which allows the cells to migrate through 3D matrices, was studied in A375m melanoma cells12. In human neutrophils, a method of motility has been observed in which one large bleb at the front of the cell drives motility but several small blebs appear at the rear of the cell as it slows suggesting that multiple blebs can also be used to slow movement67. This type of motility relies on Rho/ROCK signalling and does not involve proteolytic breakdown of the surrounding matrix12. The spontaneous cortex behaviours leading to one or many ruptures forming these two types of blebbing are studied in to papers ‘Dynamic modes of the cortical actomyosin gel during cell locomotion and division’ (Paluch et al, 2006)52 and ‘Cracking up: symmetry breaking in cellular systems’ (Paluch et al, 2006)68. In the later of these, actin is grown around beads in order to create a simplified model for spontaneous cortex rupture under tension. The conditions leading to single or multiple ruptures are studied in the bead system. It is suggested that, as with nucleation and growth of polymerisation reactions77, many blebs are seen when ‘nucleation’ of rupture is fast relative to growth of the hole, whilst a larger single bleb is seen in the opposite case. They suggest if cortical tension is well below the instability threshold, it is unlikely that nucleation will be seen in more than one place. Especially if the tension is so low that rupture cannot occur spontaneously and must be induced. Actin cortex contraction in cytokinesis The behaviour of the cortex is also important for cytokinesis, both for determining the position of the cleavage furrow as well as in the segregation of proteins. Before the onset of division, Rho activity increases, leading to a more contractile cortex and hence, rounder cells. As cytokinesis begins, a gradient of cortical contractility leads to cortical flows directed towards the equator69-71 and there is experimental evidence to suggest that it is these flows that lead to the creation of a cleavage furrow8, 72. The mechanism leading to these flows is unclear, but in ‘Site selection for the cleavage furrow at cytokinesis’ (Burgess and Chang, 2005)76 it is shown that the mitotic spindle plays an important role in determining the position of the cleavage furrow. As well as this role in establishing the cleavage furrow, cortical flows have also been associated with the segregation of proteins. For example, before division in C. elegans embryos, increased cortical contraction and flows are seen73, 74. In ‘Cortical flows powered by asymmetrical contraction transport Par proteins to establish and maintain anterior-posterior polarity in the early C. elegans embryo’ (Munro et al, 2004)75 it is shown that these flows in turn lead to the transport of several cortex-associated proteins to specific parts of the cell. Similar effects have also been seen in later divisions in c. elegans75 as well as in Drosophila embryos63. APPENDIX - B The recruitment of proteins and the assembly of an actin cortex Some of the proteins, which regulate the actin cytoskeleton are present at the membrane throughout the blebbing cycle. These include RhoA37, it’s downstream affecter ROCK10, 39, 40, and Rho GEFs which are activators of RhoA37. However their role in cortical reassembly is unclear. Ezrin is the first protein to be recruited Proteins related to the assembly of the actin cortex are recruited to the bleb in sequence. The first protein in this sequence is ezrin 37. Ezrin is an ERM protein that links the actin cytoskeleton to the cell membrane. In cells expressing the dominant FERM domain of ezrin, the cortex still regrows but the blebs do not fully retract 37. This is consistent with ezrin’s role in tethering the cortex to the membrane. The ERM protein Moesin is also recruited to the bleb membrane37. Actin recruitment and nucleation Actin is recruited soon after ezrin forming a cortex beneath the bleb membrane 37. In order to find the actin nucleators responsible for assembling this structure, Charras et al combined proteomic analysis of isolated cortex-rich blebs with a localisation/shRNA screen for phenotypes in which the cortex was weaker or less able to contract38. From this, 2 proteins were found to produce the bulk of the actin in the cortex. These were the formin Diaph1 and the Arp2/3 complex. When one of these was depleted, the cell still contained a cortex but when both were depleted together, the cortex was almost completely lost. This suggests that the two nucleators act independently. This is similar to the situation seen at the front of migrating cells. However, in this case the two nucleators are spatially separated, whilst in blebs they are not. It was shown that either protein contributed roughly equal amounts of actin, but that Diaph1-mediated assembly happened four times faster than Arp2/3-mediated assembly. Depletion of the two nucleators gave opposite phenotypes relative to wild type cells with Diaph1 depletion leading to larger blebs, whilst Arp2/3 depletion led to smaller blebs. Therefore, cells may be able to adjust the contribution of each nucleator in order to fine-tune their cortical mechanical properties. Two possible causes of the opposite phenotypes are suggested in the paper. The first is based on the polymerisation speed of the two nucleators. Diaph1 is faster, and so the blebs may become larger when this is depleted since all of the actin then has to be nucleated by the slower Arp2/3. When Arp2/3 is depleted, the blebs would then be smaller due to an increase in the amount of Diaph1 nucleated actin. Secondly, the difference could be because the depletion of the two nucleators has opposite effects on the cortical tension since a more contractile cortex leads to larger blebs. Bundling proteins and finally motor proteins are recruited The next proteins to be recruited to the bleb are actin bundling proteins αactinin, coronin and later fibrin. Trypomyosin and myosin, the contractile motor proteins were the final proteins to be recruited. Once recruited, the myosin localised to distinct foci whilst the other proteins were distributed evenly throughout the cortex37. The actin network doesn’t act statically during myosin driven contraction Around 50 myosins are initially recruited to start retraction and this number increases roughly 5-fold throughout retraction. It has been shown that the cortex cannot simply act statically throughout contraction since not enough myosins are recruited to buckle it6. This has been calculated by comparing the force exerted by myosin with the force required to buckle the cortex, which is estimated from the wavelength of the wrinkles and the cortex bending rigidity41. It has been shown that actin depolymerisation doesn’t occur during retraction and so this cannot account for the difference6, 37. One possible explanation is that the stochastic nature of actin bundling proteins allows actin filaments to occasionally detach, increasing their effective length and so allowing buckling. A second is that actin is severed throughout retraction. This severing could be mediated through aip1-coronin-cofilin since coronin is present in blebs37, 42. Actin turnover is low once the cortex is established Once a continuous cortex has been assembled in the bleb, actin turnover is very low. This has been demonstrated by imaging with fluorescently tagged actin as well as by treating blebs with cytochalasin D, a protein which caps the barbed ends of actin filaments inhibiting polymerisation37. APPENDIX C Spline Curves49 Spline curves are a useful tool for fitting a curve to a series of data points. They are convenient for a number of computational reasons. Also, they represent data well because they treat the data points as ‘control points’, which they must go close to, but not necessarily pass directly through and therefore a smoother curve is given. A spline curve is a curve, (x(s), y(s)), where x and y are spline functions of a coordinate s. s is a coordinate marking how far along the curve a point is. A spline function consists of a series of concatenated polynomial segments joined together to form one continuous function. These polynomials are usually order 3 or 4. Higher orders would be able to represent more complex curves but would also hugely increase computation. Therefore, instead of increasing the order of the polynomial to represent a more complex curve, it is common to increase the number of segments. If a function x(s) consists of NB concatenated weighted segments (basis functions), it is referred to as a B-spline. Each of these basis functions, Bn(s), is defined over a unit length span of the s-axis and are joined at ‘knots’. The spline function can be written in the form: 𝑁𝐵−1 𝑥(𝑠) = ∑ 𝑥𝑛 𝐵𝑛 (𝑠) 𝑛=0 where xn are the weights corresponding to each basis function. 𝐵−1 ∑𝑁 𝑛=0 𝐵𝑛 (𝑠) = 1 for all s because Bn(s) are basis functions. The equation can be written in matrix form: 𝑥(𝑠) = 𝐵(𝑠)𝑇 𝑄 𝑥 𝐵(𝑠)𝑇 = [𝐵0 (𝑠) … 𝐵𝑁𝐵−1 (𝑠)] 𝑥0 𝑄𝑥 = [ … ] 𝑥𝑁𝐵−1 There are methods for calculating the basis functions depending on the order of polynomial used and whether or not the knots are evenly spaced, see the appendix of reference 49 for more details. The current equations apply to a bi-infinite spline function and therefore require and infinite number of basis functions which is, of course, impossible to program. Real data exists over a finite range and, therefore, finite basis can be used. These basis sets can either be periodic (as in the case of the membrane) where the first basis function meets with the final one, or aperiodic. The mathematics for aperiodic spline functions is slightly more complicated. For the case of a periodic, regular (evenly spaced knots), quadratic spline function there is a simple method of finding the weights that can be found in the appendix of reference 49. There is also a convenient way of storing the basis functions as a matrix of coefficients for this case. The mathematics surrounding calculating norms, inner products and other useful properties of spline functions are also found in chapter 3 of this book. This shows how a one-dimensional set of points could be represented by a spline function. However, the membrane in this project spans over 2 spatial dimensions and therefore requires a 2-dimensional spline function to represent it. In this case, the data are represented by a curve 𝑟(𝑠) = (𝑥(𝑠), 𝑦(𝑠)) where x and y are spline functions. In this case the weights xn are replaced by vector ‘control points’, 𝒒𝒏 = (𝑞𝑛 𝑥 , 𝑞𝑛 𝑦 ). The curve can then be represented as: 𝑁𝐵−1 𝒓(𝒔) = ∑ 𝒒𝒏 𝐵𝑛 (𝑠) 𝑛=0 Once again, the mathematics for calculating properties such as the norm or inner product in the two dimensional case are given in chapter 3 and the appendix of reference 49. APPENDIX D Error Analysis Since there was no reference for the ‘correct’ location of the membrane, it was decided that the best way of getting a curve for comparison was to manually click several points on the membrane in every 5th frame. Curves were fitted to these points and then, for each point outputted by the snaking program, the shortest distance to the reference curve was calculated and the average over all points was taken. This gives an average error on points for every fifth frame throughout the bleb cycle. This is of course not perfect since there is error in the manually clicked curve. When two adjacent membranes were very close or when the bleb was small it was often difficult to identify exactly where the membrane was. Furthermore, the brightest part of the membrane is often up to 3-4 pixels thick so both the manual curve and the snake could be identifying equally likely section of the curve as membrane whilst giving different coordinates. Another problem was that the snake curve was a closed loop whilst the bleb membrane was not, so the snake curve may differ from the reference curve at the bleb rim where the curves do not follow membrane. As a result of this, an average error of less than 1 pixel was effectively considered to be tracking the curve as well as can be judged with a manually drawn reference curve. The errors were calculated for 5 blebs that I had not previously looked at and so had not been used in writing and configuring the code (Movies 3-6). Blebs were chosen which looked quite different in order to test the program in different situations and to try to find the limitations of the program. Three trackings were compared to the reference curve in each case to get an average error. Test bleb 1 Movie 3: The first test tracking. Every 5th frame is shown (25 second intervals). It can be seen from the images that the membrane is least visible at the start and end of the blebbing cycle when the bleb is smallest and this is when the largest errors were seen. The average error on points from the three repeats for movie 3 for all of the frames was 0.699 pixels suggesting that the curve was tracked very well. As described above, an average error of less than 1 is considered to be accurate when comparing to a manually drawn reference curve. Figure 7 shows the average error for each frame, plotted against frame number for the bleb. The error is largest at the start and end of the blebbing cycle when the bleb was smallest. This is expected since the membrane is less bright and sharply defined in these smaller blebs. For the larger, better-defined curve, an average error of 0.5-0.6 pixels is seen. Figure 7: The average error for each frame plotted against frame number for the bleb shown in movie 3. Test bleb 2 Movie 4: The second test tracking. Every 5th frame is shown (25 second intervals). A large error is seen for frame numbers 25-45 (the6-10th images shown) where the snake was tracking an adjacent membrane to the left of the bleb. The average error from the three repeats for movie 4 was 0.898. This is larger than in the previous case since, as can be seen from the movie, for frames 25-45 (the 6-10th images shown) one side of the snake is tracking an adjacent, brighter membrane, rather than the membrane it should be tracking. This suggests that a possible limitation of the program is that the snake may jump to nearby, brighter membranes. Figure 8 shows the average error for each frame plotted against the frame number for this bleb. Although the average error for all frames was less than 1, large peaks of 1.3-1.4 pixels were seen for the frames in which the snake was tracking the adjacent membrane, as well as at the end when the bleb was small and the membrane less visible. At other times an average error of 05-0.7 pixels is seen. Figure 8: The average error for each frame plotted against frame number for the bleb shown in movie 4. Test bleb 3 Movie 5: The third test tracking. Every 5th frame is shown (25 second intervals). As can be seen in the images, the membrane separating the tracked bleb with the smaller bleb to the right of it becomes very feint between the 5th and 7th images but the snake continues tracking properly. The average error on the bleb shown in movie 5 was 0.648 pixels suggesting that this was well tracked. In this movie, the boundary between the bleb being tracked, and the bleb to the right of it becomes less well defined (frames 16-31), and so this tests the code in a situation where the boundary between two blebs is feint. Figure 9 shows the average errors for each frame plotted against frame number for this bleb. The errors were highest for this bleb at the start when the bleb is small, before falling to between 0.5 and 0.7 for the remaining frames. Figure 9: The average error for each frame plotted against frame number for the bleb shown in movie 5. Test bleb 4 Movie 6: The fourth test tracking. Every 5th frame is shown (25 second intervals). The racked bleb forms in the gap between two other blebs and then retracts back to the cell. The average error for the bleb shown in movie 6 was 0.718, and so the snake was close enough to the reference to be considered accurate. The bleb in this movie forms between two existing blebs and then retracts back to the cell, and so tests the code in unusual circumstances. Figure 10 shows the average errors for each frame plotted against frame number and, as with the previous bleb, it can be seen that the error starts relatively high whilst the bleb is small and the membrane is less well defined, before falling to between 0.5 and 0.8 for the remaining frames. Figure 10: The average error for each frame plotted against frame number for the bleb shown in movie 6. Test bleb 5 Movie 7: The fifth test tracking. Every 5th frame is shown (25 second intervals). The average error for the bleb shown in movie 7 was 0.699 and so this bleb was also well tracked. The bleb in this movie moves slightly as a whole while going through the blebbing cycle since it is pushed by the bleb beneath it. This therefore suggests that the code can track blebs that move whilst going through the blebbing cycle. Figure 11 shows the average error for each frame plotted against the frame number for this bleb. It can be seen that the error starts high where the bleb is small. There is a second peak around frame 20. Figure 11: The average error for each frame plotted against frame number for the bleb shown in movie 7. APPENDIX E The level set method81 The level set method is used to quantify the evolution of complex boundaries, ensuring that they continuously propagate in their normal direction. It was suggested by Osher and Sethian (1988)83. Following the derivation in ‘Morphodynamic profiling of protrusion phenotypes’ (Machacek and Danuser, 2006)81, if we have two cell boundaries (αT, αT+1) in frame numbers T and T+1, the level set method allows the boundary to continuously propagate from the former to the latter and allow the user to follow local regions of the boundary thoughout. In level set, the 2D cell boundary αT is converted into a 3D surface ΦT, the level set, which is the signed distance function from the boundary. I.e. that value of ΦT at each point is given by its proximity to the nearest boundary References 1) ‘Molecular Cell Biology’ 6th edition Harvey Lodish, Arnold Berk, Chris A. Kaiser, Monty Krieger, Matthew P. Scott, Anthony Bretscher, Hidde Ploegh, Paul Matsudaira 2) Singer SJ, Nicolson GL (1972). The fluid mosaic model of the structure of cell membranes. 175(4023) 720-731 3) Doherty GJ and McMahon HT (2008). Mediation, Modulation and Consequences of Membrane-Cytoskeleton Interactions. Ann. Rev. of Biophys. 37 65–95 4) Medalia, O et al (2002) Macromolecular architecture in eukaryotic cells visualized by cryoelectron tomography Science 298 1209-1213) 5) Machnicka, B et al (2011) Spectrin-based skeleton as an actor in cell signalling. Cell Mol Life Sci published online - August 6) Charras, G., Coughlin, M., Mitchison, J., Mahadevan, J. (2008) Life and times of a cellular bleb, J. Biophys 94 1836-1853 7) Bray D (2001) Cell Movements: From Molecules to Motility, 2nd edn. New York: Garland Publishing. 8) Bray, D and White, J (1988) Cortical flow in animal cells Science 239, 883888). 9) Fackler, O., Grosse, R. (2008) Cell motility through plasma membrane blebbing J. Cell Biol. 181(6) 879-884 10)Blaser, H. et al. (2006) Migration of zebrafish primordial germ cells: a role for myosin contraction and cytoplasmic flow. Dev Cell 11, 613-627 11)Pinner, S. & Sahai, E. (2008) PDK1 regulates cancer cell motility by antagonising inhibition of ROCK1 by RhoE. Nat Cell Biol 10, 127-137, 12)Sahai, E. & Marshall, C. J. (2003) Differing modes of tumour cell invasion have distinct requirements for Rho/ROCK signalling and extracellular proteolysis. Nat Cell Biol 5, 711-719 13)Wolf, K. et al. (2003) Compensation mechanism in tumor cell migration: mesenchymal-amoeboid transition after blocking of pericellular proteolysis. J Cell Biol 160, 267-277 14)Cramer, L. P. (2010) Forming the cell rear first: breaking cell symmetry to trigger directed cell migration. Nat Cell Biol 12, 628-632 15)Chhabra, E and Higgs, H. (2007) The many faces of actin: matching assembly factors with cellular structures. Nat. Cell Biol. 9 1110-1121 16)Cunningham, C.c. (1995). Actin polymerisation and intracellular solvent flow in cell surface blebbing. J. Cell Biol 129 1589-1599 17)Charras, G.T. et al, (2005) Non-equilibration of hydrostatic pressure in blebbing cells. Nature 435 365-369 18)Tournaviti et al, (2007). Sh4-domain-induced plasma membrane dynamization promtes bleb-associated motility. J.Cell Sci. 120 3820-3829 19)Boss, Porter, Fishkind, Burton, K and Taylor, D.L. (1997) Traction forces of cytokinesis measured with optically modified elastic substrata, Nature 385 450-454 20)Bereiter-Hahn, Luck, Miebach, Stelzer, Voth (1990), Spreading of trypsinized cells: cytoskeletal dynamics and energy requirements. J.Cell Sci. 96(1) 171188 21)Pletjushkina, Rajfur, Pomorski, Oliver, Vasiliev, Jakobson (2001) Induction of cortical oscillations in spreading cells by depolymerisation of microtubules. Cell Motil. Cytoskeleton 48, 235-244 22)Trinkaus, Kubota, Saoka, Fred and Wodl, Sahai & Marshall, Blaser, Grinnell, F (1982) Migrations of human neutrophils in hydrated collegen lattices. J. Cell Sci. 58, 95-108 23)Mills, Stone, Pitman (1999) Extranuclear apoptosis. The role of cytoplasm in the execution phase. J. Cell Biol. 146, 703-708 24)Barros, Kanaseki, Sabirov, et al (2003) Apoptotic and necrotic blebs in epithelial cells display similar neck diamemters but different kinase dependency. Cell Death Differ. 10, 687-697 25)Paluch, E et al (2005) Cortical actomyosin breakage triggers shape oscillations in cells and cell fragments. Biophys. J. 89, 724-733). 26)Keller H and Eggli P (1998) Protrusive activity, cytoplasmic compartmentalisation, and restriction rings in locomoting blebbing Walker carcinosarcoma cells are related to detachment of cortical actin from the plasma membrane. Cell motil. Cytoskeleton 41 181-193. 27)Sheetz, M (2001) Cell control by membrane-cytoskeleton adhesion. Nat. Rev. Mol. Cell Biol. 2 392-396 28)Gadea, deToledo, Anguille, Roux (2007) Loss of p53 promotes RhoA-ROCKdependent cell migration and invasion in 3D matrices. J. Cell Biol 178 23-30 29)Kitzing et al (2007) Positive feedback between Dia1, LARG, and RhoA regulates cell morphology and invasion. Genes Dev. 21 812-814 30)Kimura, K et al (1996) Regulation of myosin phosphatase by Rho and Rhoassociated kinase (Rho-kinase). Science 273, 245-248 31)Mitchison, T., Charras, G., Mahadevan, L. (2008). Implications of a poroelastic cytoplasm for animal cell shape and dynamics. J. Cell Biol. 146. 703-708 32)Charras, G (2008) A short history of blebbing. J. Micros 231(3) 466-478 33)Dai and Sheetz (1999) Membrane tether formation from blebbing cells. J. Biophys 77 3363-3370 34)Hochmuth and Marcus, (2002) Membrane tethers formed from blood cells with available area and determination of their adhesion energy. J. Biophys 82 2964-2969 35)Traynor and kay, (2007) Possible roles of the endocytic cycle in cell motility. J. Cell Sci 120 2318-2327 36)Zikker, Ziegler, Sackmann (1992) Spectral analysis of erythrocyte flickering in the 0.3-4- microm-1 regime by microinterferometry combined with fast image processing. Phys Rev. A 46, 7998-8001 37)Charras, G., Hu, C., Coughlin, M., Mitchison, T. (2006) Reassembly of contractile actin cortex in cell blebs. J. Cell Biol. 175 477-490 38)Bovellan, M., Charras, G. et al, (2012) The cellular cortex is a composite of two independently nucleated actin networks, Awaiting Publication 39)Wyckoff, J. et al (2006) Rock- and myosin-dependent matrix deformation enables protease-independent tumour-cell invasion in vivo. Curr. Biol. 16 1515-1523 40)Sahai, E (2007) Illuminating the metastatic process. Nat Rev Cancer 7 737749 41)Cerda and Mahadeven (2003) Geometry and physics of wrinkling. Phys Rev Lett. 90, 074302 42)Brieher et al (2006) Rapid actin monomer-insensitive depolymerisation of Listeria actin comet tails by cofilin, coronin and Aip1. J. Cell Biol. 175, 315324 43)Watanabe, N., (2010) Inside view of cell locomotion through single-molecule: fast F-/G-actin cycle and G-actin regulation of polymer restoration. Proc Jpn Acad Ser B Phys Biol Sci. 86(1), 62-83 44)Tsuji, T., Miyoshi, T., Higashida, C., Narumiya, S., Watanabe, N., (2009), An order of magnitude faster AIP1-associated actin disruption than nucleation by the Arp2/3 complex in lamellipodia. PLoS One. 4(3), e4921. 45)Higashida C., Suetsugu S., Tsuji T., Monypenny J., Narumiya S., Watanabe N., (2008), G-actin regulates rapid induction of actin nucleation by mDia1 to restore cellular actin polymers. J Cell Sci. 121(20), 3403-3412 46)Miyoshi T., Tsuji T., Higashida C., Hertzog M., Fujita A., Narumiya S., Scita G., Watanabe N., (2006), Actin turnover-dependent fast dissociation of capping protein in the dendritic nucleation actin network: evidence of frequent filament severing. J Cell Biol. 175(6), 947-55. 47)Watanabe N., Mitchison TJ., (2002) Single-molecule speckle analysis of actin filament turnover in lamellipodia. Science. 295(5557), 1083-6. 48)‘Computer Vision: Models, Learning, and Inference.’ Simon, P., Cambridge University press 2012 49)‘Active contours.’ Andrew, B., Michael, I., Springer Verlag, 1998 50)‘Snake: Active Contour’, Dirk Jan Kroon, 2010 (updated 2011) http://www.mathworks.com/matlabcentral/fileexchange/28149 51)‘An Unbiased Detector of Curvilinear Structures’ Carson Steger, 1996 52)Paluch E et al. (2006) Dynamic modes of the cortical actomyosin gel during cell locomotion and division, Trends in Cell Biol., 16(1), 5-10 53)Abercrombie, M., (1980) The crawling movement of metazoan cells. Proc. R. Soc. Lond. B. Biol. Sci. 108, 129-147 54)Ridley, A.J., (2001) Rho family proteins: coordinating cell responses. Trends in Cell Biol., 11, 471-477 55)Rohatgi, R. et al, (2000) Mechanism of N-WASP activation by CDC42 and phosphatidylinositol 4,5-bisphosphate. J. Cell Biol. 150, 1299-1310 56)Jay, P.Y. et al, (1995) A mechanical function of myosin II in cell motility. J Cell Sci, 108, 387-393 57)Bellion A et al (2005) Nucleokinesis in tangentially migrating neurons comprises two alternating phases: forward migration of the Golgo/centrosome associated with centrosome splitting and myosin contraction at the rear, J. Neurosci. 25, 5691-5699 58)Janson, L., Taylor, D. (1993) In vitro models of tail contraction and cytoplasmic streaming in amoeboid cells. J. Cell Biol. 123, 345-356 59)Wittman, T., Waterman-Storer, C.M. (2005) Spatial regulation of CLASP affinity for microtubules by Rac1 and GSK3β in migrating epithelial cells. J. Cell Biol. 169, 929-939 60)Rodriguez, O.C. et al (2003) Conserved microtubule-actin interactions in cell movement and morphogenesis. Nat Cell Biol. 5, 599-609 61)Friedl, P., and Wolf, K. (2003) Tumor-cell invasion and migration: diversity and escape mechanisms. Nat. Rev. Cancer 3, 362-374 62)Vasiliev, J.M. (2004) Cytoskeletal mechanisms responsible for invasive migration of neoplastic cells. Int. J. Dev. Biol. 48, 425-439 63)Barros, C.S. et al (2003) Drosoplila nonmuscle myosin II promotes the asymmetric segregation of cell fate determinants by cortical exclusion rather than active transport. Dev Cell, 5, 829-940 64)Fishkind, D. et al (1991) Microinjection of the catalytic fragment of myosin light chain kinase into dividing cells: effects on mitosis and cytokinesis. J. Cell Biol. 114, 967-975 65)Haston, W.S., Shiels, J.M. (1994) Contraction waves in lymphocyte locomotion. J. Cell Sci. 68, 227-241 66)Reatner, S. et al (1997) Microtubule retraction into the uropod and its role in T cell polarization and motility. J. Immunol. 159, 1063-1067 67)Grinnell, F., (1982) Migration of human neutrophils in hydrated collagen lattices. J. Cell Biol. 5, 711-719 68)Paluch, E., van der Gucht, J., Sykes, C. (2006) Cracking up: symmetry breaking in cellular systems. J. Cell Biol. 175(5), 687-692 69)Coa, L-G., Wang, Y-L. (1990) Mechanism of the formation of contractile ring in dividing cultured animal cells. II. Cortical movement of microinjected actin filaments. J. Cell Biol. 111 1905-1911 70)Wang, Y-L. et al (1994) Single particle tracking of surface receptors movement during cell division. J. Cell Biol. 127, 963-971 71)DeBiasio, R.L. et al (1996) Myosin II transport, organization and phosphorylation: evidence for cortical flow/solation-contraction coupling during cytokinesis and cell locomotion. Mol. Biol. Cell 7, 1259-1282 72)Benink, H.A. et al (2000) Analysis of cortical flow models in vivo. Mol. Biol Cell 11, 2553-2563 73)Hird, S., White, J. (1993) Cortical and cytoplasmic flow polarity in early embryonic cells of Caenorhabditis elegans. J. Cell Biol. 121, 1343-1355 74)Cowan, C.R., Hyman, A.A. (2004) Asymmetric cell division in C.elegans: cortical polarity and spindle positioning. Annu. Rev. Cell Dev. Biol. 20, 427453 75)Munro, E. et al (2004) Cortical flows powered by asymmetrical contraction transport Par proteins to establish and maintain anterior-posterior polarity in the early C.elegans embryo. Dev. Cell 7, 413-424 76)Burgess, D.R., Chang, F. (2005) Site selection for the cleavage furrow at cytokinesis. Trends Cell Biol. 15, 156-162 77)Domb, C., Lebowitz, J., (1983) Phase transitions and critical phenomena. Vol. 8 Academia press Inc., NY/London. 507 pp. 78)Higashida, C. et al (2004) Actin polymerization-driven molecular movement of mDia1 in living cells. Science 203 2007-10 79)Watanabe, N., Higashida, C., (2004) Formins: processive cappers of growing actin filaments Exp Cell Research 301 16-22 80)Machacek, M. et al (2009) Coordination of Rho GTPase activities during cell protrusion Nature 461 99-103 81)Machacek, M., Danuser, G. (2006) Morphodynamic profiling of protrusion phenotypes Biophysics journal 90 1439-1452 82)Yang, L. et al (2008) Modelling cellular deformations using the level set formalism BMC Systems Biology 2:68 – published online