Radar Cross-Section - Electrical and Computer Engineering

2.7 RADAR CROSS SECTION
2.7.1 Introduction
At this time we want to turn our attention to some of the other parameters of the radar range equation. In particular, we want to discuss radar cross section, or RCS. One of the definitions of RCS is
power reradiated toward the source per unit solid angle incident power density 4
. (2-64)
The units of the numerator of Equation (2-64) are watts while the units of the denominator are watts/m
2
. Thus, the units of RCS is m
2
, as discussed earlier. Two of the key phrases in the definition of Equation (2-64) are “reradiated” and “toward the source”.
This says that the RCS parameter attempts to capture, in a single number, the ability of the target to capture energy from the radar and reradiate it back toward the radar.
In general, computation of target RCS is very complicated. In fact, except for some very simple surfaces, RCS can only be approximately computed. This may explain why there is a large amount of current research in methods to more reliably predict the
RCS characteristics of practical targets.
2.7.2 RCS of Simple Shapes
In general, the RCS of a target depends upon its physical size. However this is not always the case. An example of the case where RCS depends upon physical size is a sphere. Specifically, the RCS of a sphere of radius r is
r
2 provided r
.
(2-65)
A case where RCS does not depend upon physical size is a cone where the nose of the cone is facing toward the radar, as shown in Figure 2-6 . For the case of Figure 2-6 the RCS is given by
2
16
tan
4
. (2-66)
In this case it will be noted that the RCS is proportional to wavelength but is not dependent on the overall size of the cone. If the cone had any other orientation relative to the line-of-sight (LOS) to the radar (see Figure 2-6 for a definition of LOS), its RCS would depend upon the length of the cone and the diameter of the base. Also, if the point of the cone is not perfectly sharp, as shown in the case of Figure 2-7 , the RCS will depend upon the size of the nose.
©2011 M. C. Budge, Jr
21
Figure 2-6 – Cone Geometry
Figure 2-7 – Ideal Reentry Vehicle RCS – Nose-on Aspect
In most cases, the RCS is dependent on both the size of the object and the radar wavelength. Examples of other simple shapes and their RCSs are contained in Figure 2-
8 . For the case of the chaff dipole, it appears as if the RCS depends only upon wavelength. However, as implied in the figure, the given equation for RCS applies only to the case where the length of the chaff dipole is equal to the wavelength, and the dipole is oriented normal to the LOS. If one were to consider all orientations of a chaff dipole, the average RCS would be
avg
0.15
2
.
Figure 2-8 – RCSs of Some Simple Shapes
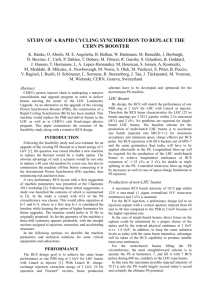
A classical plot in RCS theory is shown in Figure 2- 9 . This figure contains a plot of normalized RCS versus normalized radius for a sphere. It provides an illustration that the RCS of an object is generally a complicated function of both the size of the object and the wavelength of the electromagnetic wave that impinges on the object.
©2011 M. C. Budge, Jr
22
Figure 2-9 – Normalized RCS of a sphere vs. Normalized Size
If the object size is less than a wavelength we say that the object is in the
Rayleigh region of the incident electromagnetic wave. In this region, the RCS of the object is a function of the size of the object relative to a wavelength. As an example, for the sphere case illustrated in Figure 9 the sphere RCS in the Rayleigh region is given by
ray
80
r
4
3
2
4
. (2-67)
The most common example of the case where an object size is on the order of a wavelength is the case of rain or clouds. Another example would be insects.
The center region of Figure 2-9 is termed the resonance, or Mie, region. The
Mie designation is in honor or the person that developed the equation for the curve of
Figure 2-9.
In this region the object size is on the order of a wavelength and the RCS is transitioning from being dependent upon both object size and wavelength to being dependent mainly on object size. As indicated in this figure, the RCS can often appear to be larger than dictated by object size. Typical objects that could be in the resonance region would be birds, bullets, artillery shells, some missiles and very small aircraft.
The third RCS region is termed the optical region and is where most objects fall.
As indicated, in this region the object is much larger than a wavelength. Further, the
RCS is (or can be) a strong function of the size of the object.
In general, the RCS of an object depends upon the orientation of the object relative to the LOS. As an example, the RCS of the flat plate illustrated in Figure 2-10 is given by
©2011 M. C. Budge, Jr
23
kdw
2
sinc
2
kd
0.5
2
cos
2
sinc
2
kw
2
sin
2
k
2
, kw 1, where sinc
sin
. kd 1
(2-68)
LOS
20
-10
-20
10
0 d w
-30
-40
-50
-80 -60 -40 -20 0
(deg)
20 40 60 80
Figure 2-10 – RCS of a Flat Plate and
The plot of Figure 2-10 was created for a flat plate with
0.3 m d w 1 m and
0
(L-band). As can be seen, the RCS varies significantly as the angle of the
LOS changes. It will also be noted that the peak RCS is significantly larger than the 1-m
2 area of the plate.
Most targets of interest are not the simple shapes indicated thus far. In fact, targets such as airplanes consist of many different shapes that are in different orientations. Further, as the targets move relative to the radar LOS, the relative orientations of the various shapes change significantly. As a result, a typical plot of target RCS versus orientation relative to the LOS is a very complex looking plot. The classical plot that illustrates this variation of RCS is in Figure 2-11 below. This figure shows the measured variation in RCS of a B-26 bomber as a function of azimuth orientation relative to the LOS. As can be seen, the RCS varies by quite a large amount
©2011 M. C. Budge, Jr
24
and in a random looking fashion. If one considers that the orientation of the aircraft will change continually as the aircraft flies toward the radar, the angular variation in RCS will translate to a time variation of RCS that would look random.
Figure 2-11 – Experimental RCS of a B-26 Bomber
2.7.3 Swerling RCS Models
In an attempt to capture target RCS fluctuation effects in a mathematical model that could be easily used in detection studies, Peter Swerling
6
developed statistical representations of RCS that are commonly referred to as the Swerling RCS models .
There are four Swerling models termed Swerling 1, Swerling 2, Swerling 3 and Swerling
4. Many radar analysts refer to a fifth Swerling model that is termed Swerling 0 or
Swerling 5. The fifth Swerling model is defined as a target that has a constant RCS. This
Swerling model would be representative of a sphere since the ideal RCS of a sphere is constant over orientation angle and time.
The four Swerling models attempt to represent both statistical and temporal variations in RCS. The statistical properties of Swerling 1 and Swerling 2 RCS variations (which we will refer to Swerling 1 or Swerling 2 targets , or SW1 and SW2 targets) are the same and are governed by the density function
6 Swerling, P. “Probability of Detection for Fluctuating Targets”, IRE Transactions, IT-6, April 1960, pp.
269-308
©2011 M. C. Budge, Jr
25
f
1
AV e
AV U (2-69) where U
is the unit step function. Equation (2-69) is the equation for an exponential density function.
is the average RCS of the target and is the value that would be
AV used in the radar range equation.
The statistical properties of SW3 and SW4 targets are also the same and are governed by the density function f
4
2
AV e
2
AV U . (2-70)
Equation (2-70) is a Chi-squared, two degree of freedom, density function. Again,
AV is the average RCS of the target.
The difference between a SW1 and SW2 target lies in the difference in the time variation of RCS. Likewise for the difference between a SW3 and SW4 target. With a
SW1 or SW3 target the RCS fluctuates slowly over time and with a SW2 or SW4 target the RCS fluctuates rapidly over time. In the classical definitions, SW1 and SW3 targets are said to change RCS on a scan-to-scan basis and SW2 and SW4 targets are said to change RCS on a pulse-to-pulse basis.
Scan-to-scan means that the radar “looks” at the target only seldomly – on the order of seconds. Pulse-to-pulse means that the radar “looks” at the target every PRI.
The phrase scan-to-scan derives from search radar terminology where the radar constantly rotates and “scans” by the target only every few seconds.
3.7.3.1 Swerling Statistics
Plots of the density functions of Equations (2-69) and (2-70) are shown in Figure
2-12 . The plots of Figure 2-12 indicate that the RCS values for SW1 and SW2 targets are concentrated at small values (values below
) whereas the RCS values for SW3
AV and SW4 targets are concentrated at values fairly close to the average RCS. This is further illustrated in Figure 2-13, which contains plots of RCS versus dimensionless time for SW1/SW2 and SW3/SW4 targets. As will be noted, the RCS values for the
SW1/SW2 case tend to vary significantly and stay well below the average RCS of 0 dBsm (1 m
2
) whereas the RCS values for the SW3/SW4 case tend to cluster around a value slightly below the average RCS of 0 dBsm.
©2011 M. C. Budge, Jr
26
Figure 2-12 –Density Functions for Swerling RCS Models
Figure 2-13 – RCS vs. Time for SW1/SW2 and SW3/SW4 Targets
2.7.3.2 Swerling Fluctuation Models
As was indicated earlier, the difference between SWodd (SW1, SW3) targets and
SWeven (SW2, SW4) targets lies in the rate at which the RCS is assumed to vary. It was stated that the SWodd model assumes that the RCS changes on a scan-to-scan basis. In the search RRE discussions we referred to a search volume (see Figure 2-5 ) and indicated that the search radar covers the search volume within a certain time we termed T . This
S process of covering the search volume is termed a scan and T is termed the scan time.
S
If we were using a SWodd target model in the search radar analysis we would assume that the RCS changed from scan to scan but stayed constant during the scan. Thus, we would assume that the RCS changed every T seconds, but stayed constant over any
S specific T interval. If we were using a SWeven target model we would assume that the
S
©2011 M. C. Budge, Jr
27
target RCS changed every PRI, or every T seconds. Thus, the SWeven RCS models imply rapid RCS fluctuation whereas the SWodd models imply slow RCS fluctuation.
This difference in RCS fluctuation models is illustrated in Figure 2-14 , which is a plot of
RCS versus pulse number, or PRI, for the two cases. For the SW1 model the RCS changes every 50 pulses and the RCS changes every pulse for the SW2 model.
Figure 2-14 – SW1 and SW2 RCS Fluctuation Models
The concept of SWodd and SWeven represents an idealization that is not achieved in practice. Actual targets exhibit RCS variations that lie somewhere between SWodd and SWeven. How close the fluctuation lies to either model depends upon the complexity of the target, the operating frequency of the radar and the time between RCS observations. As an example, we consider a target that we can model by 5 spheres, or point sources (not a realistic target model). In this example we “fly” the target model toward the radar with a constant x velocity of 150 m/s and a y and z velocity of zero. The center starts at x=20,000 m, y=5,000 m and z=0 m. We assume that all of the scatterers have the same RCS (1 m
2
) and compute the composite RCS (the total RCS of all five scatterers) as a function of time.
Figure 2-15 contains plots of composite RCS over a 3-second interval for the case where the carrier frequency is 8.136 GHz (low X-band) and 90.632 GHz (W-band).
©2011 M. C. Budge, Jr
28
Figure 2-15 – Sample RCS Variation
For the X-band case, the RCS remains fairly constant for time periods of 10’s of milliseconds. However, over periods of seconds the RCS variation becomes unpredictable (i.e. random). Thus, at X-band, this target exhibits a RCS behavior that is consistent with a SWodd target.
For the W-band case the RCS variation (with time) is much more rapid so that the
RCS varies significantly over time intervals of 10’s of milliseconds. In this case, it might be appropriate to represent the target with a SWeven model.
2.7.3.3 Math Behind Fluctuation Model
To understand the above relation between RCS variation rate and operating frequency we need to consider how the signals from the scatterers combine to form the composite signal in the radar. We start by considering the unmodulated pulse we discussed earlier. For this case we can write the voltage pulse at the transmitter output as v
T
V e
T j 2
f t rect
. (2-71)
This voltage is converted to an electric field by the antenna and propagates to the target which creates another electric field. The electric field created by the target propagates back to the radar where the antenna converts it to a voltage. If the target is a sphere (a point scatterer) the voltage at the antenna output, or some point in the receiver (before the matched filter), can be written as v
R
V e
R j 2
2 R c
rect
t
2 R c
p
. (2-72)
In Equations (2-71) and (2-72)
©2011 M. C. Budge, Jr
29
and
V
T
P
T
(2-73)
V
R
P
S
P G G
T T R
3
. (2-74)
If we have N point targets clustered close together their electric fields, at the radar, will add so that the total voltage in the radar receiver is v
R
k
N
1
V e
Rk j 2
2 R k c
rect
t
2 R c
p
(2-75) where
V
Rk
P G G
T T R
3 k k
. (2-76)
If we assume that the scatterers are close together so that the various R k
are close to the average range to the cluster, R , we can write v
R
K
k
N
1
k e j 2
2 R k c
rect
t
2 R c
p
(2-77) where
K
P G G
T T R
3
2
. (2-78)
With some manipulation we can rewrite Equation (2-77) as v
R
K
k
N
1
k e
j 4
R k
e j 2
f t rect
t
2 R c
p
.
Finally, if we define
as the net RCS of the N point scatterers we can write v
R
K
j
e e j 2
f t rect
t
2 R c
p
where
k
N
1
k e
j 4
R k
2 and
arg
k
N
1
k e
j 4
R k
.
(2-79)
(2-80)
(2-81)
(2-82)
©2011 M. C. Budge, Jr
30
With some thought, it will be observed that
is a strong function of R k
. Indeed, variations in R k
of
2 can cause the phase of the voltage from the th k scatterer to vary by 2
. Thus, it doesn’t take much relative movement of the scatterers to dramatically affect the value of the sum in Equation (2-81). Also, as the carrier frequency increases,
decreases and smaller changes in the relative positions of the scatterers can have larger effects on the variations of
, the total RCS.
The above is what led to the difference in RCS variation in demonstrated Figure
2-15 . In both cases (top plot and bottom plot) the changes in the relative positions of the scatterers is the same over the 3-second time period considered. However, at the lower carrier frequency (top plot) the relative positions change by less than a wavelength over the 3 second period. On the other hand, for the higher frequency the relative positions change by several wavelengths.
2.7.4 Relation of Swerling Models to Actual Targets
Our discussions of the Swerling RCS models have thus far been theoretical. To be of use in practical radar problems we need to attempt to relate the various models to actual targets. One of the standard assumptions is that the SW1/SW2 RCS fluctuation model (described by Equation (2-69)) is associated with complex targets such as aircraft, tanks, ships, cruise missiles, etc. These would be targets that have a large number of surfaces and joints with different orientations. In practice, detection measurements indicate that, indeed, the SW1/SW2 model provides a good representation of complex targets. The reason for this lies in the central limit theorem and some properties of
Gaussian random variables. We will discuss this relation further when we discuss detection probability.
The standard assumption concerning the SW3/SW4 fluctuation model is that it applies to somewhat simple targets such as bullets, artillery shells, reentry vehicles and the like. It turns out that the model is somewhat consistent with a target that consists of a predominant scatterer and several smaller scatterers. In practice, the SW3/SW4 target model doesn’t do a very good job of predicting detection performance against the aforementioned target types. However, it appears to work better than the SW1/SW2 target model and the constant RCS model (SW0 or SW5).
2.7.5 An Example
A classical example in RCS discussions is termed the two scatterer problem. In this problem we seek to find the composite RCS of two, equal size, scatterers separated by a distance of 2 d . The geometry for this problem is shown in Figure 2-16 .
©2011 M. C. Budge, Jr
31
Figure 2-16 – Two-Scatterer RCS Problem
We can write the positions of the two scatterers in the ,
coordinate system as
r r
1
,
1
r d
(2-83) and
r r
2
,
2
r d
d sin
.
The ranges to the two scatterers are
R
1
r
d cos
d sin
2 r
2 d
2
2 rd cos
(2-84)
(2-85) and
R
2
r
d cos
d sin
2 r 2 d 2
2 rd cos
. (2-86)
If we assume r d we can write
R
1
d cos
and
R
2
d cos
.
With this we get, from Equation (2-81)
k
2
1
k e
j 4
R k
2
x
2
.
Manipulating, we get x
2 k
1
k e
j 4
R k
1 e
j 4
e
j 4
d cos
2 e
j 4
e j 4
d cos
.
(2-87)
(2-88)
(2-89)
(2-90)
©2011 M. C. Budge, Jr
32
With
1
2
0
we get x
2
0 e
j 4
e
j 4
d cos
0 e
j 4
cos
e j 4
d cos
4
d cos
. (2-91)
Finally, from Equation (2-89) we get
4
0 cos
2
4
d cos
. (2-92)
Figure 2-17 contains plots of
can be seen, the degree to which
versus
for d
1 and d
3 with
0
varies as a function of
depends upon the
1 m
2
. As separation of the scatterers relative to the radar wavelength. It is also interesting to note that the peak RCS of 4 m
2
is larger than the sum of the individual RCSs (2 m
2
).
Figure 2-17 – RCS Variation for Two Scatterers –
0
1 m
2
©2011 M. C. Budge, Jr
33