docx - The University of Texas at Arlington
advertisement

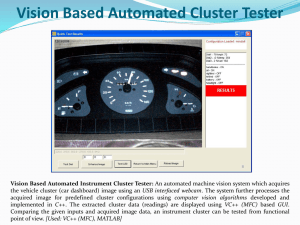
AMEYA KULKARNI 308 S. West Street, Apt. #10, Arlington Texas – 76010 ameya.kulkarni@mavs.uta.edu 817-757-0468 (Mobile) OBJECTIVE Looking for an internship in the field of Computer Vision, utilizing my programming skills SKILLS Programming skills: Assembly, C, C++, VC++ (SDK & MFC), Visual Basic and MATLAB Microcontrollers/processors: 80C51, 80C52, 8085, 8086, PIC24 family, LPC2292/94 (ARM7) Operating Systems: DOS, Windows 2003 server/XP/Vista/Win 7, Linux Shell Scripting Computer Vision Algorithms: Video processing, Digit recognition, Face Recognition(PCA, Ada-boosting), Motion Estimation and Tracking, Hough Transform, Chamfer distance, Stereo Vision, Image and Video database searches, Shape context indexing. [MATLAB – Image Processing Toolbox] EDUCATION Master of Science in Electrical Engineering, University of Texas at Arlington (Expected: Fall 2011) GPA: 4.0/4.0 Bachelor of Engineering in Electronics & Telecommunications, University of Pune, India (May 2009) GPA: 3.7/4.0 Relevant Coursework: Computer Vision, Digital Image Processing, Digital Signal Processing, Coding Techniques, Advanced Embedded Systems, Advanced Microprocessors, Microcontroller & Microprocessors, Data Structures & Files. EXPERIENCE Intern at CREST department KPIT-Cummins Info-Systems Limited (www.kpitcummins.com) Fall 2008 – Spring 2009 Research Project: Vision Based Automated Instrument Cluster Tester: An automated machine vision system which acquires the vehicle cluster (car dashboard) image using an USB interfaced webcam through WIN32 system WIA-API. The system further processes the acquired image for predefined cluster configurations using computer vision algorithms developed and implemented in VC++. The extracted cluster data (readings) are displayed using VC++ (MFC) based GUI. Comparing the given inputs and acquired image data, an instrument cluster can be tested from functional point of view. [Used: VC++ (MFC)] COMPUTER VISION PROJECTS Gesture Recognition (American Sign Language) using DSTW and DTW: Spring 2010 Scale and Translation invariant gesture recognition based on similarity measure between query and model video sequences is implemented. Similarity measure is found out by using either simple Dynamic Time Warping (DTW) or Advanced Dynamic Space Time Warping (DSTW) algorithm. In presence of moving distractors motion and skin detection based hand detector module may fail but use of dynamic space time warping algorithm (DSTW) to find the similarity measure improves accuracy greatly over simple DTW algorithm.[Language Used: MATLAB] Face Detector: Spring 2010 Developed Face detector which uses Ada-Boosting and Bootstrapping algorithms at training stage and multi-stage cascades of boosted classifiers aided with skin detection at testing stage. [Language Used: MATLAB] Face Recognition using Correlation, Principal Component Analysis and Ada-boosted Classifiers: Spring 2010 A face recognition using 2-D cross correlation, PCA and Ada-Boosted Classifier was implemented in order to compare accuracy and speed of these methods.[Language Used: MATLAB] Person Tracker: Implemented motion estimation based person tracker which draws bounding box around person. The tracker determines center of mass of the person and calculates his/her speed from Euclidean distance between centers of mass. The tracker determines walking pose of the person such as Constricted Legs or Expanded Legs. [Language Used: MATLAB] OTHER PROJECTS Development of RTOS and Ethernet HTTP Server Spring 2010 Developed Round Robin Pre-emptive Real Time Operating System (System Functions for yielding, sleep, wait and semaphore signaling) and wrote TCP/IP stack to host an HTTP server for an automated robot ROVER to control its location coordinates and display data such as health, current location and wireless communication channel used for communication.[Embedded C] PC interfaced bidirectional RS-485 communication system: (University of Texas at Arlington) Fall 2009 Two separate designs, Controller and Peripheral node. Controller provides a PC RS232 port through which commands can be entered. It outputs commands on a 2-wire RS-485 bus. Peripheral node extracts information out of the asynchronous data stream. It controls multiple devices connected to it and sends unsolicited messages to the controller in from input devices. Unacknowledged messages are retransmitted by random exponential back off algorithm. [Language Used: Embedded C] ACCOMPLISHMENTS/HONORS/AWARDS State Merit Rank Holder in High School Examination (4th at state board in science stream) National Open Merit Scholarship holder Talent Search Scholarship holder (Level-I and Level-II)