SERB devices for the isolation of buildings and equipment against
advertisement

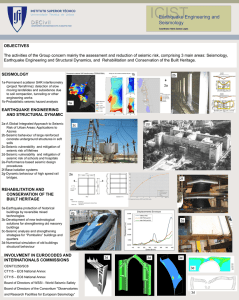
Proceedings of the 16th International Conference on Nuclear Engineering ICONE16 May 11-15, 2008, Orlando, Florida, USA ICONE16 - 48554 SERB DEVICES FOR THE ISOLATION OF BUILDINGS AND EQUIPMENT AGAINST SHOCKS, VIBRATIONS AND SEISMIC MOVEMENTS Viorel Serban Adrian Panait Subsidiary of Technology and Engineering for Nuclear Projects, Bucharest-Magurele, Romania Subsidiary of Technology and Engineering for Nuclear Projects, Bucharest-Magurele, Romania Phone:40-1-4574431, Fax:40-1-4574431 serbanv@router.citon.ro Phone:40-1-4574431, Fax:40-1-4574431 panaita@router.citon.ro Marian Androne George Alexandru Ciocan Subsidiary of Technology and Engineering for Nuclear Projects, Bucharest-Magurele, Romania Subsidiary of Technology and Engineering for Nuclear Projects, Bucharest-Magurele, Romania Phone:40-1-4574431, Fax:40-1-4574431 andronem@router.citon.ro Phone:40-1-4574431, Fax:40-1-4574431 ciocang@router.citon.ro ABSTRACT The paper presents the advantage of non-oscillating systems – SERB type – for the seismic isolation of buildings compared with other solutions for seismic protection of the buildings which are now employed worldwide. The non-oscillating isolation devices – SERB type – have a capsulated structure and are capable to overtake large compression and tension loads on vertical direction with very small deflection and cut off the seismic action in horizontal direction. The stiffness of the devices is zero for the translations on any direction in horizontal plane upto a pre-set displacement which usually, is between 0.6 - 0.8 of the maximum seismic soil displacement. After having reached that value, a non-linear increase of the device stiffness is occurring on the horizontal direction in order to provide a non-shock limitation of some random seismic displacements higher than the maximum displacement accommodated by the device. The motion inside the device is restricted all time by the dinamic friction. On vertical direction, the stiffness of the devices is big in order to avoid the additional stresses on the structural elements of the isolated suprastructure, due to the differential settlement of the devices on the suprastructure permanent loads that could appear. The system provides very small deflection of the device on vertical direction with high damping. On request, SERB isolators can be so fabricated to have the desired stiffness on vertical direction. Standard devices (960x960x230) are capable to overtake a permanent compression load of 3000KN and tensile load of 1 Copyright © 2008 by ASME 1500KN, respectively, over which dynamic loads of similar values may overlap. The maximum seismic acceleration transferred to the isolated structure on horizontal direction is ranging between 0.03g and 0.05g depending on the friction coefficient. The maximum relative displacement between the isolated suprastructure and the infrastructure embedded into the ground, is about 3 times smaller than the maximum seismic displacement showed by the oscillating systems employed today and smaller then the maximum seismic soil displacement. In series SERB device (960x960x230) allows for a maximum seismic displacement of 230mm. An application of the new seismic isolation system as the solution to seismically isolate the heavy water detritiation system building at Cernavoda NPP, is presented. 1. GENERAL PRESENTATION The construction of buildings capable to withstand seismic actions can involve various techniques. Such techniques depend both on the type of the building and the characteristics of the seismic movement. Considering the fact that the seismic action on the building is dependent on : the type of the earthquake focus, the distance between the building site and the earthquake focus, the local geological conditions, it results that the design solutions for buildings to withstand future earthquakes need to consider the above mentioned parameters. The current trend to apply the same design considerations to all the types of seismic actions for all the types of buildings irrespective of the kinetic characteristics of the ground seismic movement, of the local geological conditions and of the type of the building [1, 2] is an error which will lead to great material and human losses with the future earthquakes. In order to get a quantitative understanding of the differences among various building seismic design solutions, herein below there is a brief presentation of the various alternatives. The great difference in the building behavior during an earthquake results from the fact that a building (along with its foundation ground) make-up an oscillating system which represents a BUILT-UP of kinetic and potential energy of repeated seismic movement oscillations. The oscillating system may OVERTAKE and BUILT-UP or NOT the seismic energy from each soil oscillation, function of the location of the important eagen vibration periods of the building within the spectral component of the seismic action. Related to the ground response seismic spectrum, the important eagen vibration periods of the building may fall-in the left part, in the transfer range of the seismic action (transfer without energy built-up), on the right , in the isolation range of the seismic action ( non-transfer and non-build-up range of energy) or in the resonance range of the seismic action (maximum transfer and maximum built-up range of energy). Among these ranges, there are transition ranges in which the seismic energy transfer and built-up phenomena evidence different weights. In order to specify such dynamic behavior regimes of the buildings, the seismic action defined by the seismic ground response spectrum is divided into 5 areas which may be defined as follows for a seismic action with only one dominant harmonic component of T period: 𝑇 Area a) resonance area ranging between and √2 ∙ 𝑇; √2 Area b) isolation area ranging between 3𝑇 and ; 𝑇 Area c) transfer area ranging between 0 and ; 3 Area d) transfer area 1, transfer - resonance, ranging between 𝑇 𝑇 and ; 3 √2 Area e) transfer area 2, resonance - isolation, ranging between √2 ∙ 𝑇 and 3𝑇. Buildings, which in point of the dynamic behavior fall-in areas ‘a’, ’d’ and ‘e’, are building-up seismic energy during an earthquake which leads to the amplification of the building seismic response. The buildings falling-in areas ‘b’ and ‘c’ do not build-up seismic energy and additionally, in area ‘b’ the energy transfer from the ground to the building is not totally accomplished. For real seismic actions, which are different due to their design ground response spectrum, the 5 areas may be defined as follows: area a) resonance area encompassed between 𝑇𝐵 and 𝑇𝐶 ; area b) isolation area encompassed between 3𝑇𝐶 and ∞; 𝑇 area c) transfer area encompassed between 0 and 𝐵 ; 3 area d) transfer –resonance area encompassed between 𝑇𝐵 √2 𝑇𝐵 3 and ; area e) transfer-resonance area encompassed between √2 𝑇𝐶 and 3𝑇𝐶 . TB and TC may be defined by the possible dominant periods of the seismic action on that site, namely, 𝑇𝑚𝑖𝑛 and 𝑇𝑚𝑎𝑥 . Considering the large variety of the kinetic characteristics of the seismic actions, a proposal of classification in function of their spectral component, is presented below: a) “fast”earthquakes are the earthquakes having the dominant repetition periods of ground movement below 0.5 seconds. These earthquakes are generated by surface foci (shallow earthquakes) on hard and average soils; b) “slow”earthquakes are the earthquakes having the dominant repetition periods of the ground movement higher than 1 second. These earthquakes are generated by intermediate and deep foci on soft and average soils; c) “moderate” earthquakes are the earthquakes having the dominant repetition periods of the ground movement ranging between 0.5 seconds and 1 second. This is also the class of the earthquakes generated by surface and intermediate foci in function of the site soil characteristics. 2 Copyright © 2008 by ASME The main problem that needs to be solved by the seismic design of buildings consists in the TRANSFER OF A MINIMUM QUANTITY OF SEISMIC ENERGY FROM THE GROUND TO THE BUILDING and in so that the transferred energy should not build-up in the building-ground oscillating system. Herein below all the measures which make-up and demonstrate the increase of a building capacity to withstand a seismic action is called: ”seismic qualification”. 2. POSSIBLE SOLUTIONS TO QUALIFY THE BUILDINGS SEISMICALLY Alternative 1 – Elastic behavior of the building (classic solution) In this case, dynamically, the building is usually located in the transfer area of the response spectrum or in the transfer and resonance areas, function of the spectral range in which the dominant vibration period of the building-foundation ground assembly is situated. The seismic energy transferred to the building in repeated cycles, may be built-up in the buildingground oscillating system when its eagen vibration period is in the transfer or resonance range with the seismic movement. A small part of the seismic energy built-up by the building is consumed due to the low damping capacity of the system, leading to the limitation of the seismic response amplitude of the building at large values. With Alternative 1, the amplifications of the seismic acceleration in a building are 4-6 times higher than the maximum ground acceleration, function of the damping capacity, specially of the non-structural elements of the building. If the building is located in the transfer area, though the building accepts seismic energy with each seismic action repetition cycle, the oscillating system is not building it up. The relative movement of the building is in-phase with the seismic action and the seismic energy per one cycle is equal with the kinetic energy of the building (the system potential energy is actually zero). In case that the building is in the resonance range with the seismic movement, there occurs a de-phase of the building seismic response with the seismic action of about 90 degrees and the system is building –up kinetic and potential energy. The maximum value of the built-up energy depends on the system damping capacity. Alternative 2 – Plastic hinges in the building (classic solution). In this case, dynamically, the building may be located in the transfer or resonance area in its non-damaged condition but, due to damaging, it may pass to the isolation or resonance area, function of the type of the seismic action (i.e. fast or slow or moderate) and the building characteristics. It is aimed that the reduction of the building seismic response be accomplished by the occurrence of some structural local damages (i.e. in the location of beam joints, columns and foundation-column joints) during a big earthquake, generically called:” plastic hinges”. The damage is modifying the dynamic behavior of the building in two directions: Direction 1 – Due to the friction developed in the plastic hinges, a further dissipation of the seismic energy built-up in the building is generated , leading to the reduction of seismic energy built-up in the building-foundation oscillating system and implicitly to a reduction of the seismic response which may get decreased by 20% -30% as to the non-damaged condition. From that viewpoint, Direction 1 is equivalent to inserting some hydraulic dampers into the building (Alternative 3). Direction 2 – Due to the damage of the links between the beams-columns and columns-foundation, there occurs an important reduction of the building stiffness which make the damaged building eagen vibration periods get higher. In this case the dynamic behavior of the building in the condition of a forced excitation of the seismic movement, is substantially modified. The seismic energy transferred to the building per one oscillation cycle may be smaller or bigger than with the case of the non-damaged building and the maximum energy which is built-up by the building- ground oscillating system may be smaller or bigger. Dynamically, the seismic response of the structure may fall-in the two cases: Case 2a – the building enters the isolation area due to damaging. By the increase of the damaged building eagen vibration period, the building passes from the transfer or resonance area to the isolation area. Due to that phenomenon, a reduction of the building seismic response by 2-4- times as to the situation in which, dynamically, the building remains in resonance with the seismic action, is occurring. The reduction depends on the distance from the resonance area due to the increase of the vibration period. In this case, Direction 2 is equivalent to the building seismic isolation (alternative 5). In fact, the damage is leading to a self - isolation of the building against the seismic movement. This method was developed in Japan and U.S.A. where most of the recorded earthquakes have the dominant repetition period of the ground movement below 0.5 seconds. Alternative 2 of seismic qualification with platic hinges may be successfully applied to “fast” and “moderate” earthquakes, which is the case of the most earthquakes in the world. Case 2b – the building enters or stays in the resonance range due to damaging. By the increase of the building eagen vibration period due to damaging, the building passes to the resonance range and it cannot shift out because the relative level displacements are increasing so much that the building is destroyed before entering the isolation area. This case may be frequently met with “slow” earthquakes whose dominant repetition period of the ground movement is greater than 1 second or even with moderate earthquakes, function of the type of the building. The relative level displacement of the building that needs to increase very much so to reach the condition in which the damaged building eagen vibration period may be greater than the dominant period of the seismic movement, cannot be obtained. If the damaged building cannot reach an 3 Copyright © 2008 by ASME oscillation period greater than the repetition period of the seismic movement, the phenomenon to reduce the seismic response cannot occur and thus, the seismic energy built-up in the half-damaged building is occurring with the amplification of the seismic response rather than the reduction of the seismic response , because the energy dissipation due to the increase of damping, cannot compensate the energy built-up in the oscillating system which is not shifted out of the resonance range of the seismic movement. By the reduction of the building assembly stiffness and the increase of the eagen vibration period, case 2 b is similar with alternative 5 only if the damaged building eagen vibration period exceeds (preferably 3 times so that the effect be significant) the dominant repetition period of the seismic movement (period may be considered Tc of the ground response spectrum if other information is not available). For “fast” earthquakes this phenomenon is usually occurring without reaching an advanced damaged condition of the building, condition which might jeopardize the building safety. With “slow” earthquakes at which TC > 1 second the increase of the damaged building eagen vibration period so that dynamically the building may reach the isolation area, T>3T C ≥ 3 seconds, is practically impossible because the relative level distortions should increase 10 times as to the values corresponding to the elastic behavior of the building, distortions which usually cannot be achieved in case of slow earthquakes and also maintaining the building stability. Alternative 3 - the control, limitation and damping of relative level displacements by hydraulic dampers or mechanical devices with damage (modern solution). In this case, dynamically the building may be within the ground response spectra range. The effect is maximum for the resonance range and the transfer ranges near-by the resonance range. In the isolation range, the increase of damping leads to the increase of the building response in accelerations if the building is situated in the resonance and transfer range. In the transfer range, the damping has no effect on the building seismic response. With this alternative (compared with alternative 1) there is a reduction of the seismic response of the building structure due to the controlled dissipation of a large quantity of seismic energy built-up in the building-ground oscillating system by the hydraulic dampers or the mechanical devices with damage. The building structure need to stay in the elastic behavior range for an efficient control of its behavior. If the building shifts to the plastic stress range, the hydraulic dampers or the mechanical devices with damage, might have a negative effect on the building safety because the forces developed in the devices oppose the revert of the building to the un-distorted position. In this case, the cooperation between the dampers with the building is altered. Specially after the earthquake in Kobe in 1995 when many buildings which were designed according to alternative 2 with plastic hinges, were destroyed, in Japan, a change in the seismic design happened, in the sense that the occurrence of plastic hinges is no longer acceptable and an increase of the building damping capacity is obtained by the insertion of specialized mechanical devices in braces (alternative 3). Alternative 4 – the control, limitation and damping of relative level displacements by telescopic devices with non-linear strengthening and large damping (modern solution). In this case, dynamically, the building may situate in all the areas of the ground response spectrum. Additionally, compared to alternative 3 , for buildings one may allow a slight exceeding in the non-linear range of behavior. This alternative is different from alternative 3 because the place of the hydraulic dampers or mechanical devices with damage in braces, telescopic devices with high strengthening and damping are installed. As per this alternative 4 one may control the relative level displacements of the building and limit these displacements to pre-set values because of the elastic nonlinear forces developed in the telescopic strengthening devices. The telescopic devices provide a great dissipation of the seismic energy including the case of very small relative level displacements. The telescopic devices have a force-distortion characteristic – hysteresis type - with strengthening in order to limit the relative level displacements to pre-set values. The devices are capsulated and pre-tightened in their boxes in order to provide a satisfactory operation with the building structure on any load level without introducing additional forces in the building due to prestressing, also eliminating the effects of shocks. As per this alternative 4 the seismic behavior of the building is controlled by elastic forces and by the damping developed in the telescopic devices providing thus both the reduction of the seismic response and the reduction of the building relative level displacements to pre-set values. The exceeding of the elastic limit of the building structural material may be allowed because the elastic forced developed in the mechanical devices are capable to make the building revert to its undistorted position. The amplification of the seismic accelerations, according to this alternative 4, is smaller than with alternative 3 reducing thus the maximum seismic accelerations in the building by about 2-3 times than with alternative 1. Alternative 5 - seismic isolation of the building by oscillating devices (novative solution). In this case, dynamically the building may situated only in the isolation range of the ground response spectrum. The seismic qualification of the building is so done that the seismic action given by the ground movement is partially transferred to the building and the building-isolator oscillating system is building-up a small quantity of seismic energy. With this alternative the building structure is divided in 2 parts: the infrastructure which is embedded in the ground, on which the oscillating devices are installed; and the supra-structure installed on the oscillating isolation devices. The seismic energy associated to the ground oscillating cycles is transferred 4 Copyright © 2008 by ASME in a small percentage to the isolated supra-structure and the oscillating system made-up of the supra-structure and the isolation devices build-up a small quantity of seismic energy from the infra-structure seismic movement, function of the magnitude of the ratio between the building eagen vibration period and the dominant from the seismic movement and function of the isolation system dissipation capacity. For the system to satisfy the safety requirements for buildings and of isolation for the seismic action transferred to the building, the system has to be stiff on vertical and flexible on any horizontal direction. The separation surface between the infra-structure and the supra-structure has to remain plane and untilted (horizontal) on permanent loads imposed by the suprastructure and the random loads, including the loads due to seismic events. In case that an isolation device gets distorted more (or even yield), a large concentration of stress may occur in the supra-structure and lead to local damage or loss of its stability. With oscillating type isolation systems the isolation device need to have a very small stiffness on horizontal so that the first eagen vibration period of the supra-structure supported on the isolation devices may be much greater (preferably over 3 times) than the dominant repetition period of the seismic movement (period Tc of the ground response spectrum if no information is available) and than the first eagen vibration period of the supra-structure considered to be embedded at the level of the isolation surface. It is only this situation when the seismic energy build-up in the oscillating system made-up of the supra-structure and the isolation system is small and a small amplification of the seismic acceleration and of the relative displacements between the infrastructure and the suprastructure is resulting. Since with the oscillating isolation systems the suprastructure relative movement is anti-phase as to the ground seismic movement (the infrastructure translation movement), than in order to limit the relative displacements between the infrastructure and the supra-structure (relative displacement governing the isolation system safety) within the oscillating isolation system, an additional damping (usually by means of hydraulic devices installed horizontally between the infrastructure and the supra-structure) is installed. The increase of the oscillating isolation system damping capacity will also lead to the increase of the seismic accelerations transferred to the supra-structure and to the increase of the seismic loads. For that reason a damping of maximum 30% (of the critical fraction at the first two vibration modes of the supra-structure) is recommended [1, 3]. Moreover, for the seismic isolation devices be also applied to tall buildings where during an earthquake or wind loads a turn-up moment greater than the stability moment (given by the building self-weight) may occur, at the surface of separation between the infrastructure and the supra-structure the isolation devices should also overtake the tensile forces in order to provide the isolated supra-structure stability against turning-up. The existing oscillating isolation systems do not provide the overtaking of some tensile forces in order to assure the building stability. Alternative 6 – building seismic isolation by nonoscillating devices (novative solution). In this case, dynamically, the building is situated on the right of the isolation area (the eagen vibration period is infinite because the building supra-structure is not oscillating and it is semi-borne by the infrastructure). Alternative 6 is different from alternative 5 due to the fact that the isolation devices do not develop elastic forces on horizontal and do not built-up a potential energy for a relative displacement pre-set around the position of balance (relative displacement which depends on the kinetic characteristics of the seismic movement, i.e. the maximum ground seismic movement). In order to limit the maximum horizontal displacements (accidental) of the supra-structure versus the infrastructure and the elimination of some possible shock effects, the non-oscillating isolation system has to develop a non-elastic force after having consumed the relative displacement pre-set around the position of balance. The non-oscillating isolation devices can achieve a gliding movement with small friction around the position of balance in the pre-set range of values. Within that interval the isolated supra-structure is no longer developing an oscillation movement during an earthquake because there is not the possibility of a potential energy built-up in the system. The supra-structure shall be “semi-borne” around the position of balance, by the infra-structure which is embedded in the ground, with displacements smaller than the ground seismic displacements. By gliding the isolation system is actually totally “cutting-off” the transfer of the seismic action from the infra-structure borne by the ground, to the building suprastructure. The supra-structure with the isolation system is no longer making-up an oscillating system which is building-up the kinetic and potential energy which generate an amplification of the seismic movement in accelerations and displacements (like the case of alternative 1-5). The relative seismic displacement between the suprastructure isolated with the non-oscillating systems (alternative 6) and the infra-structure embedded in the ground is much smaller than in the case of employing the oscillating isolation systems (alternative 5) and also smaller than the maximum ground seismic displacement. The seismic acceleration transferred to the isolated supra-structure in fractions of gravitational acceleration,”g”, is equal to the friction-gliding rate,”μ”, of the non-oscillating isolation devices. For that reason it is desirable to have a relative small friction rate which could assure the required stability of the supra-structure and also allow a slight displacement between the infra-structure and the supra-structure, with very small accelerations. The minimum rates for gliding that can be reached today without “rolling” or with active friction control systems, are encompassed between 0.03 – 0.05, which lead to a maximum supra-structure acceleration of 0.05 g. In case of using some 5 Copyright © 2008 by ASME ball gliding systems (rolling), the friction ratie is reduced to values below 0.01, which is not sufficient to provide a stability of the isolated supra-structure. In order to provide the stability of the supra-structure, the isolation systems have to achieve a shock-free limitation of the accidental displacements between the supra-structure and the infra-structure. For that reason the ideal solution is that after a pre-set relative displacement, in which non-oscillating seismic movements are developing and in which the force-distortion characteristic is horizontal (no increase of the force with the increase of displacement occurs), the isolation system may achieve a non-linear increase of the force with the displacement in order to shock-free limit the possible accidental displacements. Compared with the oscillating isolation system, with the non-oscillating isolation system with friction-gliding there is no danger if the insulator yielding because the components are subjected to very low shear forces(loads) and the yielding of the contact parts due to compression cannot occur because of the specific geometry of the isolators. By now, 3 types of non-oscillating systems have been developed in this domain. Type 1 - The isolation system developed in Japan consists of a PTF end anchored in a steel and rubber structure is gliding on a horizontal stainless steel plate. The system cannot limit the relative displacement between the supra-structure and the infra-structure to pre-set values and neither is it capable to overtake tensile forces. For that reason the isolation system can be used only by installing (in parallel) some elastic devices and of damping devices installed between the infra-structure and the supra-structure, and which are arranged in the horizontal separation plane. In the literature, the system is referred to as “Flat surface slider with dampers”. The system was applied in Japan and Italy, e.g. NATO HEADQUARTERS in Napoli in 2007 -2008. Type 2 - The isolation system developed by THK company in Japan starting with 1996, is a system according to which the movement in horizontal plane is produced by the combination of two perpendicular movements produced on profiled bars and balls. The system, called “Linear Motion guide with Caged Ball”, has a <0.01 friction rate which may provide a seismic acceleration transferred to the suprastructure, smaller than 0.01g. Since the system does not provide stability upon small horizontal actions and a minimum force for reverting to the initial position, it can be used only by the in-parallel installation of some oscillating isolators in the ratio of (2/3 THK) / (1“Elastomeric isolators”). By this combination, THK non-oscillating isolation system is practically transformed into an oscillating isolation system with large vibration period. In point of safety, the system may yield at great accidental loads due to the fact that the displacement in two perpendicular directions generate the occurrence of some great moments in the guiding-sliding system and the oscillating isolators may yield. Type 3 - SERB type non-oscillating isolation system developed in Romania starting with the year 2000, is a capsulated system with non-linear limitation of the relative displacements in the isolation surface , to a pre-set value, after performing a pre-set relative displacement. For this type of isolation system it is no longer mandatory to install horizontal mechanical devices to control. Limit and damp the relative displacements between the infra-structure and the suprastructure because the limitation is achieved inside the isolation device as per a pre-set law. With SERB devices the relative movement in horizontal plane is produced by gliding with small friction between several surfaces which operate in parallel and are located in two stiff semi-bodies, with the possibility of a controlled relative displacement among them. On horizontal direction the devices have hysteresis characteristic parallel with the displacement axes upto a pre-set value and next a non-linear elastic increase of the force is occurring in order to avoid shocks at large accidental displacements. With these SERB devices there is not the possibility to lose the isolation capacity, or to yield or get destroyed. On vertical direction, SERB device has a stiff behavior, small distortions (1-2 mm) also having a hysteresis loop. SERB isolation devices can also overtake tensile loads upto 60% of the maximum compression load. The maximum acceleration of a building supra-structure isolated by non-oscillating isolation devices, SERB type, is maximum 0.05g and the maximum relative seismic displacement between the infra-structure and the suprastructure is smaller than the maximum seismic displacement of the ground and of about 3 times smaller than the relative displacement of the oscillating isolation systems (alternative 5). SERB devices are the only devices existing today, which can provide the desired correlation between the maximum acceleration transferred to the structure and the maximum relative displacement between the infra-structure and the suprastructure so that an advanced isolation of the supra-structure is assured without overloading the technological connections between the infra-structure and the supra-structure. By now this alternative was applied in Romania. Starting with 2003, semi-oscillating and non-oscillating isolation systems which were applied to some heavy equipment have been developed [7, 9, 10]. Case studies including nuclear objectives have also been developed [8]. There were also achievements in the production of 1:1 scale building isolation devices and they were experimentally tested with the most developed installations in Romania. The experimental results are the closest to the ideal isolation solution in the sense that the hysteresis diagrams show a constant force transferred to the isolated supra-structure equivalent to a 0.03g seismic acceleration for a pre-set displacement range, followed by a non-linear increase with a big hysteresis loop. 3. ANALYSIS ON THE ENERGY TRANSFER FROM THE SEISMIC MOVEMENT TO THE BUILDING AND ITS BUILDING-UP IN THE BUILDING In order to substantiate the seismic qualification alternatives, function of the dynamic characteristics of the buildings and of the seismic action kinetics (expressed by the 6 Copyright © 2008 by ASME Variation of Kinetic and Potential energy am plitude versus period ratio. Critical dam ping ratio = 20% ratio between the building dominant vibration period and the dominant period in the seismic movement T/Ts), Figs 3.1 - 3.4 illustrate the variations of the amplitude and power transferred from the excitation to the oscillating system Pe and of the power dissipated by the oscillating system Pa, as well as the variation of the kinetic energy amplitude Ekin and potential energy Wpot built-up in the oscillating system versus the amplitude of the power and excitation energy for a mass unit of the oscillating system, for a 5% and 20% damping of the Variation of Damping and Seismic ground power amplitude. oscillating system […]. versus period ratio. Critical damping ratio = 5% Pd Ekin Wpot Kinetic / potential energy 1000 100 ratio 1.56 10 1 0.1 0.01 ratio 0.65 0.001 0.1 ratio 2 1 10 ratio = T/Ts Pe Damping and Seismic ground power 100 Fig. 3.4. amplitude of power transferred from the excitation, to the oscillating system and the power dissipated in the system versus the 10 1 excitation amplitude function of T Ts , 20% 0.1 0.01 0.001 0.01 0.1 1 10 100 ratio = T/Ts Fig. 3.1. Amplitude of power transferred from the excitation, to the oscillating system and the power dissipated in the system versus the excitation power function of T Ts , 5 % Variation of Kinetic and Potential energy amplitude versus period ratio. Critical damping ratio = 5% Ekin Wpot Analyzing the diagrams, it results that the most efficient solution for the building protection against seismic events is the building isolation by non-oscillating systems (infinite vibration period). In this case, the acceleration of the isolated suprastructure is limited to the value of the isolation device friction rate and the relative displacement between the isolated suprastructure and the infra-structure embedded in the ground, is smaller than the maximum ground displacement. Kinetic and Potential energy 1000 4. 100 Ratio = 0.61 10 1 Ratio = 0.63 0.1 Ratio = √2 0.01 0.001 0.1 1 10 ratio = T/Ts Fig. 3.2. Amplitude of power transferred from the excitation, to the oscillating system and the power dissipated in the system versus the excitation amplitude function of T TS , 5% Variation of Damping and Seismic ground power amplitude versus period ratio. Critical damping ratio = 20% Pd Pe Damping and Seismic ground power 100 10 1 0.1 0.01 0.001 0.01 SEISMIC ISOLATION OF THE DETRITIATION BUILDING ON CERNAVODA N.P.P. SITE 0.1 1 10 100 ratio = T/Ts Fig. 3.3. amplitude of power transferred from the excitation, to the oscillating system and the power dissipated in the system versus the excitation power function of T Ts , 20% CTRF Building on Carnavoda N.P.P. site is situated within Unit 1 enclosure, in the vicinity of HPECC Building and D 2O Tower Building. The building infra-structure is sectioned at 5 cm above the arranged ground at El. + 15.80 dnMB. That is the elevation where the gliding plane between the ground embedded infra-structure and the supra-structure isolated by 28 non-oscillating SERB 960x960x220 devices ( see Fig 4.1.) are located and can overtake a compression load of 3000 KN and tensile load of 1800 KN. The sealing between the ground embedded infra-structure and the isolated supra-structure is made by an elastic-gliding system – SERB 300x15xX type – which provides the satisfaction of sealing requirements in any condition. The maximum seismic acceleration transferred to the isolated supra-structure on horizontal is 0.05g and equal at all the building elevations because the supra-structure installed on SERB isolation devices are behaving like a stiff body. The maximum seismic displacement between the ground embedded infra-structure and the isolated supra-structure is estimated at about 60 mm, as per the preliminary analyses. This result shall be verified by experimental testing conducted with a 1:1 scale isolation device in installation conditions identical with the conditions on site. The isolation devices can overtake 3000 KN compression loads and 1500 KN tensile loads. Figs. 4.2. – 4.4. illustrate the experimental determinations and the obtained results with a SERB prototype loaded on a 7 Copyright © 2008 by ASME minim 15m inaltime JIKA rig and for which the maximum possible displacement on horizontal is 160 mm. Analyzing the hysteresis diagrams it results that on horizontal direction, SERB devices do not build-up potential energy for a pre-set relative displacement because they have a constant hysteresis followed by a non-linear increase with the displacement and a large energy dissipation on the hysteresis loop. On vertical, SERB devices are practically stiff but with damping capacity +28,0 Detail B -0,01 SERB isollation devices 1100 459 25 10 55 -0,596 Incinta pentru ventilatoare si putul de montaj al tubulaturii de legatura 1000 596 541 500 325 200 +24,50 400 -0,956 +20,0 300 4500 700 700 700 300 300 3500 400 200 350 Et 4 +15,50 700 Et 3 Detail A SERB sealing devices 700 300 350 300 200 +12,0 4000 200 -0,01 400 Et 2 500 200 +8,00 300 400 4000 -0,956 Et 1 300 4000 200 +4,00 Parter 325 325 400 -0,956 440 400 20 = = 400 20 B 700 400 Ø37 65 225 3500 800 220 4500 A 225 400 300 700 440 541 -0,596 10 459 596 200 -0,01 -0,596 -0,956 = -4,550 65 = 220 225 65 500 800 4700 4700 4900 A 225 B C 4700 D Detail - fixing column 4900 E F Fig. 4.1. Cross –section view of the Detritiation Installation Building Fig. 4.2. Non-oscillating capsulated SERB isolation device 960 x 960 x 230 prototype Fig. 4.3. Non-oscillating capsulated SERB isolation device 960 x 960 x 230 prototype. The experimental hysteresis horizontal load diagram for +/- 150 mm. Preload 1200KN and 1800KN REFERENCES [1] Rapoarte de calificare seismica AECL, pentru Cladirea reactorului, Cladirea serviciilor si cladirile auxiliare nucleare; [2] Cod de proiectare seismica – Partea I – Prevederi de proiectare pentru cladiri, indicativ P100/2006; [3] Japanese retrofitting technologies for buildings – Base isolation and/or Damping devices – Application example of Un-Bond Brace – Prof. Akira Wada – Tokyo Institute of Technology; Dr.Hideaki Kitajima – Japon Structural Consultants Association; Mr. Takashi Kaminosono – JICA Expert; Dr.Izuru Okawa – Building Research Institute, Tsukuba – Technical University of Civel Engineering of Bucharest - February 2005; [4] Changes of Seismic Design in Japon after Kobe Earthquake - Prof. Akira Wada – Tokyo Institute of Technology - Report; [5] “Consolidare, extindere si reamenajare corp B din complexul administrativ NAVROM in solutia SERBSITON de control, limitare si amortizare a miscarilor seismice” premiul AGIR 2007 – Lucrare SITON – Iunie 2007; [6] Rubber bearing – Catalog FIP INDUSTRIAL UK LTD PO BOX 504 Cambridge CB1 OAP – UK; [7] An efficient shock isolation system for forging hammer, Second International Conference of Romanian Society of Acoustics on Sound and Vibration, 14 – 17 October 2004 – Bucuresti Romania; [8] Solutia SERB-SITON de izolare seismica a unei centrale nuclearo-electrice de tip CANDU PHWR 700 si ACR 1000” Forumul regional al energiei – FOREN 2008, Neptun, Romania, 15-19 iunie 2008. [9] SERB devices for the mitigation of seismic action – V.Serban, M.Androne, G.A.Ciocan, Technical Scientific International Symposium on “Modern System for mitigation of seismic action” - Friday, 2008 – October, 31AGIR – Bucuresti – Romania; [10] Mechanical devices to control, limit and attenuate shocks, vibrations and seismic movements in buildings, equipment and piping networks” “SUSI – 2008 - Tenth International Conference on Structures Under Shock and Impact” ALGARVE – PORTUGALIA, 13 – 17.05. 2008; [11] Design Guidelines – Base Isolation of Structures – Trevor E. Kelly, S.E. Holmes Consulting Group Ltd; [12] European Standard. Anti-seismic devices. CEN/TC 340 Date 2008-05 prEN 1529:2008; [13] Eurocode 8: Design of structures for earthquake resistance. Part 1: General rules, seismic actions and rules for buildings. Doc CEN/TC250/SC8/N335 – January 2003; [14] THK Base Isolation Catalog – Technical Book – Catalog No.A-02-E. Fig.4.4. Non-oscillating capsulated SERB isolation device 960 x 960 x 230 prototype. The experimental hysteresis vertical load diagram. Preload 600KN 8 Copyright © 2008 by ASME