PROBLEM 1 Overturning Stability of Jack-up
advertisement

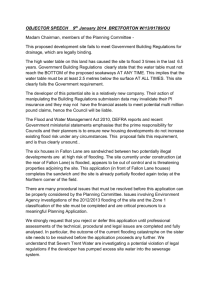
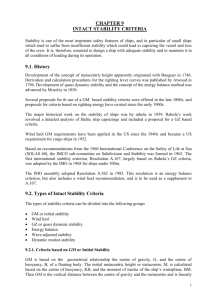
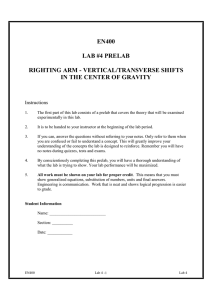
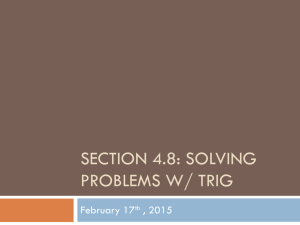
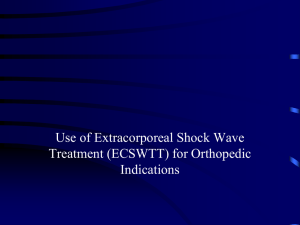
NTNU SOLUTION 2 Faculty of Marine Technology Department of Marine Structures TMR 4195 DESIGN OF OFFSHORE STRUCTURES PROBLEM 1 Overturning Stability of Jack-up Weight of deck and fixed equipment: Payload on deck: Sea load: Weight of one column: 2.0E+06 kg 1.0E+06 -- 2.0E+06 kg 4.0E+04 N/m per column 6.0E+05 kg The DNV requirement for safety against overturning is: MS 1.25 MO MS: stabilising moment, i.e. caused by functional loads. MO: overturning moment, i.e. caused by environmental loads. The minimum value of the payload is 106 kg, and this condition gives the minimum value of MS. M O 4 1 / 2 q0 80 2 / 3 80 341.2 10 6 Nm M S 2 6 10 5 40 2 10 6 1 10 6 1 / 2 40 9.81 1059 10 6 Nm According to this, the safety against overturning is 3.10, which satisfies the rules. PROBLEM 2 Damage Stability of Semi-submersible a) Effect of damage on semi-sub. 1. Neutral axis for the waterline plane: Due to flooding of water, the center of gravity will move and the neutral axis will rotate with an angle . In this case, = 45, while the flotation centre is shifted up left. See Figure 1. Note that these considerations are valid only if the additional compartment volume which is filled during heeling, cancels out the up-righting moment contribution from the damaged column. Hence, if the column is horizontally divided into several compartments, the considerations will not be valid for large angles of heel. Calculations of initial GM in a damage condition must be based on the water-plane area after damage, see Figure 1. Here, GM should be based on the axis of rotation which gives 1 minimum 2.area moment. Note that this axis will be arbitrary and will not necessarily coincide with one of the neutral axes in the right part of Figure 1. AFTER DAMAGE BEFORE DAMAGE Y Y X X Figure 1 2. Centre of buoyancy and gravity. See Figure 2. Calculation of static heel angle: The effect of a flooded compartment can be accounted for in two different ways. A possible approach can be to add the weight of flooded water together with the weight of the semi-sub, and thereafter calculate the location of the new centre of gravity, G’. Alternatively, the weight of the flooded water can be included in the static equilibrium equations as an external force. Alternative 1: Here, the weight of flooded water is considered as an external force. Due to flooding of water, a heeling moment MH will be induced. As the platform starts to heel, B will move to B’ and give an up-righting moment MR. Equilibrium occurs when MH = MR. The heeling moment and the up-righting moment can be calculated with respect to an arbitrary point since vertical force equilibrium is fulfilled, see Figure 2. For instance, the heeling and up-righting moments calculated about G are given by, M H g a cos b sin M R g GZ Alternative 2: In this approach the weight of flooded water is added together with the weight of the semisubmersible. Illustratively, the centre of gravity will move from G to G’ and cause a heeling moment, MH. As the platform starts to heel, B will move to B’ and give an up-righting moment MR. Equilibrium occurs when MH = MR, i.e. B’ and G’ must be located on the same vertical line as indicated in Figure 2. From these considerations it is possible to derive the same formulas for MH and MR as in alternative 1. 2 In contrast to problem 2a) 1., we have assumed that only a part of the column is flooded (large heel angles), and that the volume of flooded water remains constant for all angles of heel. See Figure 2. Figure 2 3. GZ-curves: Intact stability (ULS) Damage stability (PLS) 3 b) The rules given by DNV can be summarised as follows. 1. Intact stability criteria (pt. B200 in the rules): The metacentric height is to be at least 1 meter in all operation, survival and transit conditions. The metacentric height is not to be less than 0.3 meter in all temporary conditions. The heeling moment due to wind is calculated with wind velocity equal to 70 knots for operating condition and 100 knots for survival condition. The following requirements is then to be fulfilled: 2. Damaged stability criteria (pt. B300 in the rules): The waterline in the final condition of equilibrium after flooding, taking account the effect of wind (assumed 50 knots velocity) is to be below the lower edge of any opening through which progressive flooding of assumed buoyant volumes may take place. The angle of heel is not to exceed 15 in any direction. The area under the righting moment curve is to be at least equal to the area under the heeling moment curve. Anchor handling and ballast systems are to be capable of operating at a heeling angle of 15. 3. Comment on differences: The requirement to area under the righting moment curve is reduced for damaged condition. There are no specific requirements to GM in damaged condition, but requirements to the position of the water-line and maximum heel angle is given. 4 c) Wind forces. 1. Wind forces are considered from any direction relative to the unit. For intact stability, the wind velocity is to be assumed 70 knots for operation condition and 100 knots for survival condition. For damaged stability, the wind velocity is assumed to be 50 knots. Curves for wind heeling moment as a function of heel angle is to be determined. The values of the heeling moment are determined from wind tunnel tests on representative models of the unit or from calculations. Also reference IMO's ''Code for the Construction and Equipment of Mobile Offshore Units''. 2. Only steady wind forces are considered to contribute to heeling of the floating structure. This is a simplified approach in view of existence of wave-induced motions. The dynamic stability is taken care of in the requirements to area under the righting moment curve. d) GZ-curves in Figure 3. 1. The righting arm curve increases up to a heeling angle of approximately 23. When the deck is entering the water and the pontoon on the opposite side exits the water, the slope of the righting arm curve is increased. A deck height of 6m will give a larger contribution to up-righting moment when the deck enters the free surface, and therefore the slope of the GZ-curve is steepest for this deck configuration. If flooding of a compartment occurs (e.g. anchor winch room at deck), a sudden drop in the righting moment curve is observed. The magnitude of this drop depends on the size of the flooded compartment. 2. Intact stability: OK OK (see below) GM = 2.47m > 1m (A+B) > 1.3(B+C) The semi-submersible will not be in compliance with the area requirement if flooding of deck volumes is assumed and the second intercept is set equal to θ2=23. This is a too strict requirement since the GZ-curve indicate large capacity against overturning and the area below the up-righting arm increases rapidly for θ>30. Hence, we conclude that the area requirement is fulfilled in the intact stability condition. 3. Damaged stability: Static moment of heel is app. 17 > 15 (A+B) > (B+C) not OK OK (see below) The semi-submersible will not be in compliance with the area requirement if the second intercept is set equal to θ2=23. As mentioned above, this requirement is too strict since the GZ-curve indicates large capacity against overturning. Therefore, the area requirement will be fulfilled also in the damaged stability condition. 5 Note that in an accidental limit state, the personnel must be safely evacuated and this will set an upper limit on the maximum heel angle. This has not been taken into consideration above. Since the static angle of heel is larger than 15°, it is necessary to do some changes in the design: Increase the metacentric height. This can however influence the platforms characteristic motions and its strength due to changes in displacement, weight, water plane area and hydrodynamic added mass. Reduce the flooded volume by dividing it into smaller watertight compartments. This will change the weight of the platform and its center of gravity. 4. Total loss of column is better than complete flooding. Complete flooding gives no buoyancy in the column. If the column is lost, its weight gives no contribution to the overturning moment. 6