Supplementary material (2nd revision)
advertisement
")
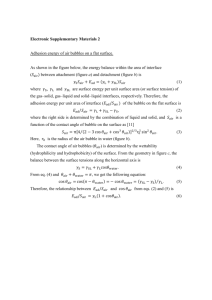
(Supplementary material) Wetting state on hydrophilic and hydrophobic textured surfaces: thermodynamic analysis and X-ray visualization S1. Roughness ratio for Wenzel and Cassie-Baxter states The roughness ratio f was calculated based on the geometry and array of the pillars fabricated on the test surfaces. Because the arrangement of the micro-pillars was periodic, the concept of a unit cell could be used to define the roughness ratio, the ratio of the wetted area to the projected area as shown by Eqs. S1 and S2. When a droplet was in the Wenzel state (W), the liquid filled the space between the micro-pillars. However, the dry etching commonly resulted in scalloping at the sides of the micro-pillars, which enlarged the wetted area as shown in Fig. S1. In this study, the scalloping was assumed as a series of semicircles with a roughness ratio (π/2). Therefore, for Wenzel droplets, we used a correction coefficient ‘c’ to compensate for this effectS1, such that the roughness ratio of a Wenzel droplet is given by A f W wetted A projected p unit cell 2 c dh p 2 1 c dh 1 dh p2 2 p2 (S1) where Awetted and Aprojected are the wetted area of the water droplet and the projected area, respectively. When a droplet is in the Cassie–Baxter state (C-B), the liquid of the droplet cannot penetrate between the micro-pillars, so the roughness ratio is defined as: fC B Fig. S1. SEM images of test sections. A wetted A projected unit cell d2 4 p2 . (S2) (Supplementary material) S2. Specific procedure used to visualize the wetting state with X-rays In this study, wetting state images were acquired at the 6D beam-line of the Pohang Light Source-II (PLS-II). Detailed information on PLS-II is summarized in Table S1. The procedure used to visualize the wetting state with X-rays was as follows. First, because X-rays are transmitted and visualized only in two dimensions, the micro-pillars had to be aligned. To find a suitable alignment for X-ray injection, the test section was rotated and tilted using various step motors. Afterward, only structure images, labeled “dry images”, were recorded. After dosing 6.3 μL droplets of deionized water on the micro-pillared surfaces, the images were recorded again in the same position. These were labeled “wet images” and contained both the silicon structure and the water droplet. To reduce white noise, the images were recorded 30 times in the same position and averaged. The intensity of X-ray images decreases when the X-rays pass through certain materials. The decreased intensity is expressed using the Beer–Lambert law with the following equations: I Dry I0e siliconsilicon (S3) IWet I 0e siliconsilicon water water (S4) I Dry IWet water water (S5) These equations show that the ratio between the initial intensity I0 and the final intensity I is proportional to the exponential of the negative value of the linear attenuation coefficient μ and thickness δ. In the dry images, the X-rays had passed through only the structure material, while in the wet images the X-rays had passed through both the structure and droplet. Therefore, the intensity of each image could be expressed with Eqs. S3 and S4. To confirm the existence of water, the intensities of the dry and wet images were divided. The resulting value was linearly proportional to the thickness of the water droplet, as shown in Eq. S5. As shown in Fig. S2, all colorized X-ray images were composed of these values. In other words, all pixel values in the figures were proportional to μwater and δwater. (Supplementary material) Table S1. Details of the X-rays of the 6D beam-line at PLS-II. Parameter Value Parameter Value Light intensity 12 [KeV] at 3 [GeV] Scintillator Single crystal CdWO4 Photon flux ~1013 [photons/s] Exposure time 300 ms Pixel resolution About 1.74 μm/pixel Fig. S2. X-ray visualization procedure. (Supplementary material) S3. Derivation of the thermodynamic model for wetting state When we consider the isothermal and isochoric conditions of a small displacement dx as shown in Fig. S3, the system of the droplet on the surface under any disturbance can be defined using the Helmholtz free energy. Regarding the Cassie-Baxter (C-B), Wenzel (W), and hemiwicking (hw) wetting states, changes in the Helmholtz free energy per unit length dL can be described by: dH C B sl sv fC B dx lv 1 f C B dx lv cos A dx wf C B dx dL dHW sl sv fW dx lv cos A dx wfW dx dL dH hw sl sv fW fC B dx lv 1 fC B dx w fW fC B dx dL (S6) (S7) (S8) where H, σ, f, θ, and w are Helmholtz free energy, surface tension, roughness ratio, contact angle and work of adhesion, respectively. Subscript C-B, W, hw, sl, sv, lv and A are the CassieBaxter state, Wenzel state, hemi-wicking state, solid-liquid interface, solid-vapor interface, liquid-vapor interface, and apparent contact angle, respectively. In Eqs. S6–S8, the last term on the right-hand side is associated with energy loss at the moving contact line. The work of adhesion w physically represents the energy loss at the moving contact line and is theoretically defined in Eq. S9. 2 cos 0 1 cos 0 2 4 4 w cos 0 2 lv sin 0 2/3 2 1 cos 0 (S9) where θ0 is the intrinsic contact angle. Regarding the hemi-wicking wetting state, we assume that the precursor of the droplet is propagated between the micro-pillars; therefore, the top of the micro-pillars remains dry. To consider the wetting transition on both hydrophilic and hydrophobic textured surfaces, Eqs. S10 and S11 were derived to define the relationship between wetting states based on the consideration that the state of a droplet on the surface is favorable in the more stable wetting (Supplementary material) state under any disturbance. Therefore, the developed thermodynamic model for estimating the wetting state is: dHW dH C B 0; Cassie-Baxter state is favorable dL dL sl sv fW dx lv cos A dx wfW dx sl sv fC B dx lv 1 fC B dx lv cos A dx wfC B dx 0 sl sv fW fC B dx lv 1 fC B dx w fW f C B dx 0 lv cos 0 fW fC B dx lv 1 fC B dx w fW f C B dx 0 fC B 1 w cos 0 dx 0 fW fC B fW fC B lv lv sv sl lv cos 0 fW f C B 0 f 1 w dx FC* B 0 FC* B C B cos 0 fW f C B lv fW fC B f 1 w FC* B C B cos 0 0 fW fC B lv lv (S10) dHW dH hw 0; hemi-wicking state is favorable dL dL sl sv fW dx lv cos A dx wfW dx sl sv fW fC B dx lv 1 fC B dx w fW f C B dx sl sv fC B dx lv cos A dx lv 1 f C B dx wf C B dx 0 lv cos 0 fC B dx lv cos A dx lv 1 f C B dx wf C B dx 0 cos A 1 w lv fC B 1 cos 0 dx 0 fC B lv sv sl lv cos 0 fC B 0 cos A 1 w * * lv fC B dx Fhw 0 Fhw 1 cos 0 fC B lv cos A 1 w * Fhw 1 cos 0 0 fC B lv (S11) where F*C-B and F*hw are the modified functions used to estimate the wetting state about the Cassie-Baxter state and hemi-wicking state, respectively. The apparent contact angle θA is estimated with the Kang-Jacobi wetting modelS2 to consider the energy loss at the moving contact line, as shown in Eq. S12. (Supplementary material) 2 cos A 1 cos A 2 1 cos A 2 4 2 sin A 2/3 2 cos 0 1 cos 0 2 1 cos 0 2 4 fW 2 sin 0 2/3 (S12) Fig. S3. The motion of the contact line about a small displacement dx in (a) the Cassie-Baxter state, (b) the Wenzel state, and (c) the hemi-wicking state. (Supplementary material) S4. Table of data for Fig. 5 The data depicted in Fig. 5(a)–(c) and associated information are tabulated below. (a) HDFS coated surfaces (θ0=109o) Geomentry EXP J.Bico et al. model modified model No d[um] p[um] i[um] h[um] fW fC-B state cosθ0 F state estimate w/σlv F* state estimate A01 A02 A03 B01 B02 B03 C01 C02 C03 D01 D02 D03 16.13 16.05 14.73 46.30 47.62 47.62 76.68 76.36 76.36 107.31 106.20 106.68 40.02 70.03 100.51 70.34 100.01 129.86 99.85 130.33 159.86 130.17 159.86 189.23 23.89 53.98 85.77 24.04 52.39 82.23 23.18 53.97 83.50 22.86 53.66 82.55 20.06 19.25 19.90 18.52 17.95 19.83 21.54 18.61 18.34 22.13 21.84 20.51 2.00 1.31 1.14 1.86 1.42 1.28 1.82 1.41 1.27 1.69 1.45 1.30 0.13 0.04 0.02 0.34 0.18 0.11 0.46 0.27 0.18 0.53 0.35 0.25 C-B C-B W C-B C-B W C-B C-B W C-B C-B W -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.33 -0.47 -0.76 -0.87 -0.44 -0.66 -0.76 -0.40 -0.64 -0.75 -0.40 -0.59 -0.71 W W W W W W W W W W W W X X O X X O X X O X X O 0.35 0.35 0.35 0.35 0.35 0.35 0.35 0.35 0.35 0.35 0.35 0.35 -0.11 -0.40 -0.52 -0.08 -0.31 -0.41 -0.04 -0.28 -0.40 -0.05 -0.24 -0.36 C-B W W C-B C-B W C-B C-B W C-B C-B W O X O O O O O O O O O O (b) Silicon surfaces (θ0=58o) Geomentry J.Bico et al. model EXP modified model No d[um] p[um] i[um] h[um] fW fC-B state cosθ0 F state estimate w/σlv cosθA F* state estimate A01 A02 A03 B01 B02 B03 C01 C02 C03 D01 D02 D03 16.13 16.05 14.73 46.30 47.62 47.62 76.68 76.36 76.36 107.31 106.20 106.68 40.02 70.03 100.51 70.34 100.01 129.86 99.85 130.33 159.86 130.17 159.86 189.23 23.89 53.98 85.77 24.04 52.39 82.23 23.18 53.97 83.50 22.86 53.66 82.55 20.06 19.25 19.90 18.52 17.95 19.83 21.54 18.61 18.34 22.13 21.84 20.51 2.00 1.31 1.14 1.86 1.42 1.28 1.82 1.41 1.27 1.69 1.45 1.30 0.13 0.04 0.02 0.34 0.18 0.11 0.46 0.27 0.18 0.53 0.35 0.25 W W W W W W W W W W W W 0.53 0.53 0.53 0.53 0.53 0.53 0.53 0.53 0.53 0.53 0.53 0.53 0.47 0.76 0.87 0.44 0.66 0.76 0.40 0.64 0.75 0.40 0.59 0.71 hw W W hw W W hw W W hw W W X O O X O O X O O X O O 0.72 0.72 0.72 0.72 0.72 0.72 0.72 0.72 0.72 0.72 0.72 0.72 0.25 0.45 0.49 0.30 0.42 0.46 0.31 0.42 0.46 0.34 0.41 0.45 -4.15 -11.58 -28.22 -0.35 -1.53 -3.39 0.22 -0.42 -1.28 0.49 0.03 -0.47 W W W W W W W W W W W W O O O O O O O O O O O O (c) MPTS coated surfaces (θ0=34o) Geomentry J.Bico et al. model EXP modified model No d[um] p[um] i[um] h[um] fW fC-B state cosθ0 F state estimate w/σlv cosθA F* state estimate A01 A02 A03 B01 B02 B03 C01 C02 C03 D01 D02 D03 16.13 16.05 14.73 46.30 47.62 47.62 76.68 76.36 76.36 107.31 106.20 106.68 40.02 70.03 100.51 70.34 100.01 129.86 99.85 130.33 159.86 130.17 159.86 189.23 23.89 53.98 85.77 24.04 52.39 82.23 23.18 53.97 83.50 22.86 53.66 82.55 20.06 19.25 19.90 18.52 17.95 19.83 21.54 18.61 18.34 22.13 21.84 20.51 2.00 1.31 1.14 1.86 1.42 1.28 1.82 1.41 1.27 1.69 1.45 1.30 0.13 0.04 0.02 0.34 0.18 0.11 0.46 0.27 0.18 0.53 0.35 0.25 hw W W hw W W hw W W hw W W 0.83 0.83 0.83 0.83 0.83 0.83 0.83 0.83 0.83 0.83 0.83 0.83 0.47 0.76 0.87 0.44 0.66 0.76 0.40 0.64 0.75 0.40 0.59 0.71 hw hw W hw hw hw hw hw hw hw hw hw O X O O X X O X X O X X 0.70 0.70 0.70 0.70 0.70 0.70 0.70 0.70 0.70 0.70 0.70 0.70 0.90 0.85 0.84 0.89 0.86 0.85 0.89 0.86 0.85 0.88 0.86 0.85 0.90 -1.86 -7.75 1.37 0.92 0.29 1.46 1.18 0.86 1.47 1.30 1.11 hw W W hw hw W hw hw hw hw hw hw O O O O X O O X X O X X Table. S2 Estimation of wetting state by Bico et al.’s model17 and presently developed model. (a) Data for HDFS-coated textured surfaces. (b) Data for silicon textured surfaces. (c) Data for MPTS-coated textured surfaces. (Supplementary material) References [S1] R. Xiao, R. Enright and E. N. Wang, Langmuir. 26 (19), 15070 (2010). [S2] H. C. Kang and A. M. Jacobi, Langmuir. 27 (24), 14910 (2011).