Guide to Uncertainty Analysis
advertisement

Guide to Uncertainty Analysis
Updated 11/10/15 - Joe Skitka
Uncertainty analysis is a vital tool for determining the validity of the results of any experimental
investigation. As an aspiring physicist, you should know that a given quantity is only
meaningful when there is something else to compare it to. A length, L = 100 m, can only be
deemed “large” or “small” compared to another length, a nanometer or a light year, for instance.
In the discussion section of a lab report, a measured quantity can be compared to an expected
quantity to imbue meaning. For instance, if the speed of a massless particle is measured as v =
2.993*10^8 m/s while the expected value is 2.998*10^8 m/s (because it’s massless), the
measured value is determined to be small compared to the expected value, and the percent error,
100%*(2.998 – 2.993) / 2.998 = 0.17% indicates how much smaller it is using a dimensionless
scale. But, in the context of an experiment, this scale is not that meaningful. How can we tell if
the result indicates that the particle was actually traveling at the speed of light, as expected, or
just a little bit less than the speed of light (and therefore has a very small mass)? To do this, the
difference, (2.998 – 2.993)*10^8 m/s needs to be compared with a different value reflecting the
reliability of the measurement. This quantity is known as uncertainty.
While uncertainty and error are often used interchangeably, for the purposes of these labs, an
effort will be made to refer to these terms with the following definitions: Error is the difference
between a measured value and the actual value. Uncertainty is the value by which an actual
quantity may deviate from a measured quantity up to a given confidence, typically 68% for 1σ or
95% for 2σ. The use of a constant confidence level along with the assumption that error in a
measurement is governed by uncorrelated, random probability distribution functions, dictates the
way uncertainty is propagated. Notice that while the error is how far a measurement is from the
actual value, uncertainty is how far it may be from the actual value. Here, “actual value” refers
to the value the measurement would produce if it were made with perfect precision and accuracy.
This is distinct from an “expected value” in that the latter assumes a prior result or physical laws
establishing the expectation are correct (for instance, that a neutrino is massless).
Random error is defined by the assumption that each measurement is independent and
governed by a random probability distribution function. Not all error falls into this category.
For instance, a speed measurement apparatus may consistently report 0.003*10^8 m/s less than
the actual value. This is known as bias. While the exact value of the bias is unknown to the
researchers, an estimate of the bias to a given degree of confidence will be figured into the
uncertainty. This uncertainty contribution cannot be reduced by taking multiple measurements;
however, it can be assumed that it is a single result from a random probability distribution
function, so that two separate biases described by uncertainties at 95% confidence can still
combine as via their root mean squares (see below). Again, the key difference is that the
uncertainty will not be reduced by taking multiple measurements. This also means it will not be
captured by fitting software in the stated uncertainty in fitting parameters. Bias can be reduced
by calibration (especially if it is already know or easily measureable). Handling of error that is
governed by processes that are not independent is beyond the scope of this guide.
Again, take note that you will see the terms error and uncertainty used differently or
interchangeably when consulting outside sources.
Estimates of Measured Values
Let’s say that you are measuring the strength of a magnetic field using a Gauss meter. The
digital readout indicates a value of B = 144.7 G. What is the uncertainty of this measurement?
On one hand, if the reading is stable, one may be tempted to use the precision of the instrument,
which might be something like 0.1 Gauss: ΔB = ΔBprecision = 0.1 G, in which case the
measurement indicates B = 144.7 ± 0.1 G.
However, an astute student may be skeptical of this result. Upon removing the probe of the
Gauss meter from the region being measured and placing it back in the same position, the value
now reads B = 145.3 G. Clearly, ΔB > 0.1 G simply because the student can only place the
probe with a limited degree of precision in the exact desired location, introducing some
uncertainty ΔBplacement. If many measurements are taken, then the standard deviation of the
distribution can be used as an uncertainty estimate. Because each measurement includes both the
precision uncertainty and the placement uncertainty, which are assumed to be random, the two
can be combined into an effective Brandom. Let’s assume this is measured to be ΔBrandom = σ =
2.7 G.
But, if the probe is removed and replaced 16 times independently and the measurements are
averaged to find the magnetic field, shouldn’t the measurement have a smaller error and,
therefore, uncertainty? Yes. Random error and its associated uncertainty will be reduced by a
factor of 1/√𝑁, for the average of N measurements:
Δ𝜱N =
ΔΦ1
√𝑁
(1)
So the resulting uncertainty is ΔB16 = ΔB/√16 = 0.675 G.
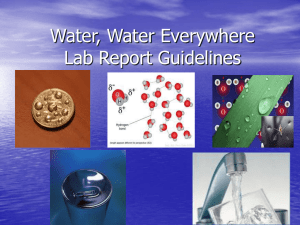
Next, the astute student may still wonder whether or not the value measured by the device is
accurate. To answer this question, we need to turn to the specifications of the device included in
its manual. Here is an excerpt from the manual of an analogue Gauss meter used in PHYS 0560,
PHYS 1560, and PHYS 2010:
Notice that there the uncertainty associated with the device is a complicated function of the value
measured and the settings of the meter. Elsewhere in the specifications, the susceptibility of the
reading to temperature fluctuations is listed as well. If it this looks like a headache, don’t worry
as students will typically not be required to estimate uncertainty to this level of detail in PHYS
0470 and PHYS 0560 (not true for PHYS 1560 and PHYS 2010). Most measurement devices in
these labs, such as voltmeters, have relatively small specified uncertainty that won’t adversely
affect results. This Gaussmeter is an exception, and if you take one of the courses listed above,
you may see these specifications again. In this case, several different contributions need to be
combined (from full-scale accuracy, instrument accuracy, internal calibration accuracy, and
probe reading, in addition to the reading’s susceptibility to temperature fluctuations, not shown.)
The device uncertainty might be something like ΔBdevice = 3 G if the maximum range is not set
very high.
Note that in the case of the Gauss meter, the uncertainty is not necessarily random, rather, it may
be bias, and for instance, it may consistently be reading 3 Gauss above the actual value. Words
like “calibration” might clue you into this. In general, it should be assumed that uncertainty
provided in manufacturer’s specifications is bias unless specifically stated. The implication of
this is that such uncertainty cannot be reduced by taking multiple measurements and should not
be propagated as though it were random.
Uncertainty contributions will also arise from theoretical assumptions made in the analysis. For
example, in measuring the deflection of an electron in what is assumed to be a uniform electric
field between two charged plates, an additional contribution to the uncertainty should be
associated with the error introduced by the assumption of uniformity. In this case, moreinvolved math/theory, numerical approximations, or additional measurements may be necessary
to estimate this. For instance, one could use a particle of known properties to calibrate for the
effect of the non-uniform field. If all assumptions are accounted for, the measured value should
fall within uncertainty of the correct value. If this is not the case, some assumptions may have
been overlooked.
Propagating Uncertainty
1. Addition: contributions to uncertainty add via their root-mean-square (RMS). This is
because the uncertainties ideally represent the standard deviations of random probability
distribution functions. When two contributions to uncertainty are added, this is modeled
by adding two random probability distribution functions. Because the variances of these
distributions add linearly to give the variance of the new distribution, and the standard
deviation is the square root of the variance, their standard deviations add via the RMS. In
the example of the magnetic field from the previous section, this looks like:
2
Δ𝐵
Δ𝐵𝑡𝑜𝑡𝑎𝑙 = √∑𝑖(Δ𝐵𝑖 )2 = √(Δ𝐵𝑑𝑒𝑣𝑖𝑐𝑒 )2 + ( 𝑟𝑎𝑛𝑑𝑜𝑚
)
16
(2)
Δ𝐵𝑡𝑜𝑡𝑎𝑙 = √(3)2 + (0.625)2 Gauss
(3)
Δ𝐵𝑡𝑜𝑡𝑎𝑙 = 3.064 Gauss
(4)
√
Notice that the uncertainty carries units like the value it pertains to, in this case, Gauss
and that these equations are dimensionally consistent. Also note that the larger
contributions to the uncertainty tend to dominate the smaller ones. In this case, the
random error only accounts for 0.064 Gauss more than it would have been with the
device’s uncertainty alone.
2. Multiplication and more complicated functional dependences combine via first-order
perturbation theory combined with the property that they add via their RMS. This results
in the general uncertainty propagation equation:
𝜕𝛹 2
Δ𝛹 = √∑𝑁
𝑖 (Δ𝜑𝑖 𝜕𝜑 ) ,
𝑖
(5)
Where 𝜳 is a function of parameters {φ1, φ2, … , φi, … , φN-1, φN} each of which has
uncertainty associated with it. This (treating the uncertainty as a first-order perturbation)
is easily visualized for functions of a single variable, where the RMS does not come into
play. The RMS is only used to combine multiple dimensions/contributions.
As an example, in lab 2 of PHYS 0470, the uncertainty of the permittivity of free space is
computed. The equation used to compute the permittivity itself is:
2 𝑑2 m
𝜀𝑜 =
(6)
𝐴
The resulting equation for its uncertainty is then:
Δ𝜀𝑜 = √(∆𝑑
4m𝑑 2
A
) + (∆𝑚
2𝑑2 2
A
) + (∆𝐴
2𝑚𝑑2 2
𝐴2
)
(7)
Where 𝜳 {φ1, φ2, φ3} = 𝜀𝑜 {m, d, A} in equation 5. Again, notice that no matter what the
units of the different parameters 𝜀𝑜 is a function of, the uncertainty will be of the correct
units as long as the original equation (6) was also.
Uncertainty through Fits
If a fit parameter (e.g. the slope of a linear fit) is used to determine a value, there will be some
uncertainty associated with the parameter. It is recommended that software be used to propagate
these uncertainties. Excel can be unintuitive and difficult to producing fit parameters with a
required degree of precision and associated uncertainty estimates. If you are not adept at Excel,
try using a free download of Kaleidagraph. This is great, simple software for making plots and
fitting curves. If you do a custom style fit, it will give the uncertainties of each parameter, even
for a nonlinear fit. See the last section of this manual for instructions. Note that most software
assumes that error is random and use the variability of the data to determine the computed
uncertainties. If bias or a priori uncertainties need to be propagated through a fit, this will need
to be worked out using a more robust system, which may involve programming the fit manually
or using more advanced software.
Uncertainty in Plots
When plotting discrete data sets (scatter plots), uncertainty is ideally expressed with error bars in
both dimensions. Include these whenever possible.
Using Uncertainty to Evaluate the Success of an Experiment
An experiment may be naively deemed “successful” (for the purposes of PHYS 0470 and PHYS
0560) if a measured value falls within the uncertainty of the expected value. This is because we
are safe in assuming that known physical theories are accurate at the parameters and precisions
used in these experiments. This will not be the case in experiments likely to probe new physics,
as in a research-grade lab. An unexpected merits scrutiny of the uncertainty propagation as well
as the assumptions made of the physics involved. When all of these are investigated with an
appropriate amount of rigor, new physics can be discovered; for instance, one might find
neutrinos have a small mass by observing them travelling slightly slower than the speed of light.
Kaleidagraph
Kaleidagraph is a super-quick solution to data analysis, but it is also more versatile than Excel
(at least for the untrained user.) The biggest advantage, besides its efficiency, is that it will
provide uncertainty in fit parameters, both linear and non-linear. Kaleidagraph is available on
the lab computers, but is generally not installed on other campus computers. The software
should be available for download from http://www.brown.edu/information-technology/software/
, but if not, then a free trial may be downloaded from www.synergy.com. Here are a few key
things you need to know to utilize the software:
Don’t label columns in the top-most cell with text. Rather there are specific title boxes,
initially labeled A, B, C, etc. If you do enter text in a box, the column will format for text
entry and will throw an error when you try to plot. (To fix this, go to column formatting
under the data menu. Format the column for “float”.)
Simply enter columns of data for the independent and dependent variables you wish to
plot.
To manipulate data, press the up/down wedges/arrows at the top right of the page to
expand the column labels for reference. A “formula entry” window should be floating
around the screen somewhere. Columns can be edited with simple commands. For
instance, if you put your Voltage data in column c1 and wish to use voltage squared,
simply type: “c2 = c1^2” in the formula entry. Press “Run” and you will see the voltage
squared has its own column.
You may wish to input a column of uncertainties for later use as error bars.
To plot: select the Gallery dropdown menu. Select the Linear menu. Select a Scatter
plot. Choose one column for your independent variable, and one or more for your
dependent variable.
To fit: select the Curve Fit dropdown menu. The presets like “linear” may be used for a
quick fit, but they will not give you uncertainty on the fitting parameters. To do this,
select General. If you’d like a linear fit, fit1 should be set to this be default. Upon
clicking it, a box should come up. Select Define to double check the form of the fit. It
should read:
m1 + m2 * M0; m1 = 1; m2 = 1
Here, {m1, m2, m3…} are the fit parameters and M0 is the independent variable. Clearly
this is just a linear fit. If you, for instance, wanted to make this a quadratic fit instead,
you would write:
m1 + m2 * M0 + m3 * M0^2; m1 = 1; m2 = 1; m3 = 1
The values on the right are initial guesses and must be provided for each parameter.
When you are done, select OK. Check the box of the dependent variable you would like
to fit. Then select OK. The uncertainty in the fit parameter is listed in the Error column
in the plot
To generate error bars, right click on the plot and select Error bars. Error bars can be
added as a percent of the value (in either variable) or from a different column of data.