Draft V03 - 00 Executive Summary

MENG GROUP 14
1
Executive Summary
Project Symphony - Multiple Optical Camera and Support System for Particle Image
Velocimetry
A Clark, B Falconer, S Lewis, M Olakara, M Piggott, K Singh
2009-2010
1 Contents
Executive Summary - Page 1 of 16
2 Introduction
The purpose of this project was to design and construct a semi-robotic measurement system capable of capturing the appropriate data to verify and improve Rolls-Royce’s computer simulation of jet engine noise generation. The underlying reason for Rolls-Royce’s interest in engine noise is motivated by the takeoff and landing noise restrictions imposed on commercial aircraft at certain times of day (Parliamentary Office of Science and Technology, 2003). Rolls-Royce’s aim is to make the Airbus A380 the ‘quietest plane at Heathrow’ (Professor Bryanston-Cross, Personal
Communication).
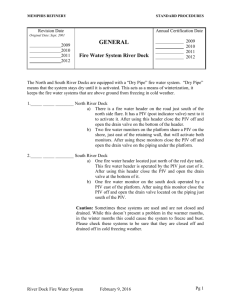
The computer simulation carried out by Rolls-Royce concluded that by changing the profile of the
engine outlet nozzle (see Figure 1) the disruptive noise on takeoff and landing can be reduced by
approximately 20%. [REFERENCE, BRENDA?]. Due to the experience and expertise available at the
University of Warwick in this field, Rolls-Royce chose to outsource the equipment design and data analysis for the verification of their model to the University.
Figure 1: Rolls-Royce Trent 800 Engine with Serrated Nozzle to Reduce Engine Noise(Bryanston-Cross, Particle Image
Velocimetry (PIV) Principle of Operation, 2010)
The experiments will be carried out on a 1/20 scale, 180mm nozzle diameter, engine mounted on a scale wing in QinetiQ’s Noise Test Facility (NTF) in Farnborough. The NTF is one of the only facilities in the world where detailed measurements on jet engine exhaust and noise generation can be carried out. A 3D velocity and turbulence map of the exhaust plume is required by Rolls-Royce, both at the engine/wing interaction zone and further downstream. To capture this data in this hostile environment Particle Image Velocimetry (PIV) was used.
Executive Summary - Page 2 of 16
PIV is the measurement and analysis technique most suited to the experimental conditions. PIV is very fast, compared to other flow velocimetry techniques, delivering high accuracy velocity, turbulence and kinetic energy in 3D information, along with other fluid dynamic properties. (Alvare,
Diez, Pothos, Troolin, & Vanderwerker, 2006) The underlying principle of PIV is comparing a pair of images of the same area of space, typically for a jet engine taken around 2.3µs apart(Boillot, 1996), calculating the displacement of particles in the images, and knowing the distance travelled in a certain period of time, calculate the velocity. The imaged particles (seeding particles) are introduced into the jet engine intake, and in each frame are illuminated by a high power laser pulse. Further information on PIV and the reasoning behind choosing PIV is explained in greater detail in the
Technical Report Section XXXX PIV.
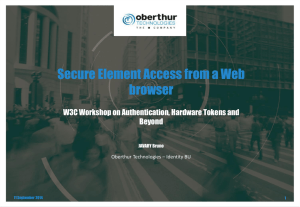
This project is designed to be a continuation of the previous work carried out with Qinetiq, but with the extra condition of looking at the airflow interaction with the engine and wing. Therefore for the first time that there will be a wing with working flaps attached to the engine in the anechoic chamber. Unfortunately, because of this, previous support structures and previous PIV camera
arrangements (See Figure 2) cannot be used as the wing will block the view of the cameras, and the
frame may collide with the wing. This means that the support structure has to be built with this new, more complicated parameter in mind.
Z
X Y
Figure 2: Previous rig design from 2006 / 2007 Meng group.
Executive Summary - Page 3 of 16
For successful 3 dimensional PIV the cameras are required to create an angle of plus and minus 45 degrees orthogonally to the light sheet. Previously this was simple, as the cameras could be mounted above a movable base, pointing up and inwards at angles of plus and minus 45 degrees to
the light sheet (see Figure 2). This design is no longer suitable because of the introduction of the
wing. To solve this problem but maintain the orthogonality between the 2 cameras the plane that the system acts in can be rotated, leaving an upright arm for one camera to sit on, and the second camera to be fixed to the horizontal base.
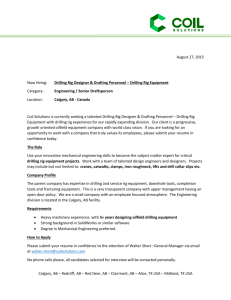
3D PIV requires data to be captured in multiple planes, which can then be combined to produce the final 3D velocity and turbulence map. This process requires the data capturing equipment to be mobile along the length of the exhaust plume. Due to the high resolution data required, fixed cameras cannot capture the exhaust plume in sufficient detail for PIV analysis. As such a system that is autonomous in nature, can be remotely controlled and is capable of positioning the cameras in a
pre-programmed pattern was designed. (See Figure 3 for an example layout of places the cameras
need to travel to).
Figure 3: Side view of exhaust plume(red), grey boxes show each image capture point, which are then stiched together to make a full view of the jet
To meet these requirements a high precision mobile rig structure, capable of supporting the cameras and lasers, together with a control system for the cameras and lasers, and data storage system is needed.
Executive Summary - Page 4 of 16
3 Aim and Objectives
The aim of this project is to create a particle image velocimetry (PIV) measurement system for Rolls-
Royce. The system is designed to measure the velocity and turbulence of the jet exhaust from a
1/20 scale engine. This data can be used to better understand how noise is generated, so quieter jet engines can be designed.
The objectives for this project are as follows:
Produce a high speed PIV system to perform velocity and turbulence mapping of the region close to the wing and engine, due to the interaction of the air and the new serrated nozzle exit. o Create CAD models of the proposed rig designs, examining how they will integrate with and fit into the overall experimental system. o Build up the finalised rig design for testing. o Test 3D traverse and high speed cameras to establish their suitability for the
experiment and eradicate potential issues to allow smooth running during the NTF.
Produce a system to measure downstream flow of the exhaust jet and jet stream as a consequence of the wing and flap deployment. o Evaluate previous computer system and support structure designs. o Design a new upgraded computer system. o Create Cad model of the system, demonstrating how the downstream system fits together and how the computer systems will be housed. o Perform FEA for vibration on the Cad model of the downstream rig. o Build rig for testing and camera positioning. o Test 2D traverse and cameras to establish their suitability for the experiment and eradicate potential issues to allow smooth running during the NTF.
Produce an automated computer system for data acquisition, storage, and control of the whole test. o Analyse previous systems. o Design new improved system where previous systems do not meet the requirements of this test. o Build partial test system to validate design. o Replicate test system to build up the complete automated computer system modularly. o Test complete system.
Executive Summary - Page 5 of 16
4 Designs and Decisions
4.1
Rig Design Overview
Figure 4: Rig Overview
The equipment for the PIV experiment will be mounted onto two rigs, the upstream and downstream rigs. These rigs will be fitted onto the autonomous modules, as described above, atop of the gantry. The upstream rig will be used for the high speed cameras, housing density measurement frames and a 3D traverse. It is also required to house the lasers, power supplies and
Executive Summary - Page 6 of 16
computers for these systems. The downstream rig will support the low speed cameras and the 2D traverse equipment as well as holding the computers for this system.
Figure 5: Diagram of the Two Rig Arrangement
The Downstream rig is used to map the downstream flow of the exhaust jet to a distance of 20 engine diameters down from the engine looking at the jet stream as a consequence of the wing and flap deployment. The downstream rig is based on a base that has been used in previous experiments. It has an optical table built into it and space underneath for the computing and laser systems. On top of this base is a rig that holds the low speed cameras and the 2D traverse.
Executive Summary - Page 7 of 16
Figure 6: Diagram of the Two Rig Arrangement
The upstream rig is to be used to perform velocity and turbulence mapping of the region close to the wing and engine. This will be performed using stereo PIV based upon two high speed cameras and a high speed laser. It is also used for taking density measurements for a separate research project. The rig will be made up from a multipurpose base from which the other systems are attached to. This base holds the lasers, power supplies and computers within it and is designed to allow the density measurement frames and the 3D traverse to be fitted onto it. The density measurement frames are interchangeable and are used independently of each other. The 3D traverse can be fitted and used in conjunction with either of the density measurement frames.
Executive Summary - Page 8 of 16
Figure 7: Downstream rig, with main features annotated
Executive Summary - Page 9 of 16
4.2
Computer System Overview
[ADD MORE PICTURES/IMAGES/SCREENSHOTS]
Figure 8 shows an overall schematic of the computer system, with cameras, lasers and remote
control terminal. The equipment is separated into three sections: Rig level covers the equipment on top of the gantry, control computers, cameras, lasers and traverses; Ground Level consists of the
RAID storage arrays and networking; the Control Room contains the remote control equipment.
Cameras
Trigger Box
Lasers
Solid State
Servers
Traverse
Rig Level
Control
Server
Remote
Control
Computer
Backup
Servers
Ground Level Control Room
Figure 8: Overall Computer network schematic
The system was designed to be modular so that extra cameras, control computers and storage arrays could easily be added if required. It also used standard communications and connections where possible (namely Windows Remote Desktop, see Section Ошибка! Источник ссылки не
найден. Ошибка! Источник ссылки не найден. for more details on this) so that difference systems, different cameras, lasers and traverses could be used where required. In this way the same system could be used for the upstream rig and the lowspeed rig, with the minimum of hardware and software changes, and crucially, using the same design for both systems makes it easier for an operator to use both.
All Rig Level computers are solid state based, since conventional platter based hard drives could easily be damaged due to head crashes caused by the vibrations from the nearby jet engine. It also
Executive Summary - Page 10 of 16
has the beneficial side effect of making these computers operate very fast. The Ground Level and
Control Room computers use conventional hard drives, since they will be far enough away from the engine not to be adversely affected by the vibrations.
The remote control computer in the control room communicates over a single Ethernet cable, and can take control of all of the control computers in the NTF with Windows Remote Desktop. This allows monitoring of the system during the tests, and easy changes to the system controls between tests, and is a much easier and safer system than directly using the computers on top of the gantry in the NTF.
Executive Summary - Page 11 of 16
5 Project Outcomes
This report has outlined and explained the design, construction and testing of a complete site specific 3 dimensional PIV system, designed to have the power and adaptability to enable 3 separate experiments examining jet noise reduction methods on a scaled engine to be carried out. This was achieved through the building up a network of pco.2000 cameras supported by specifically designed
RAID storage devices, utilization of multiple axis traverse systems and the design of various supporting rig structures.
For all of these aspects of the project, previous work and equipment had to be assessed as to its adaptability and usefulness for this new continuation of previous PIV works. All equipment that could be recycled or adapted to fit into the new systems and networks was where economic to do so. This brought down the cost of the project overall and increased the life cycle of some older components, hopefully so that they can still be utilized for future PIV work carried out by the
University of Warwick.
Despite the varying nature and continuously advancing technology associated with an industrial testspecific project, the camera network, RAID systems and control systems were analysed and designed to a tight time-scale, to maximise testing time for the remote control system and the camera networks as required. These systems were built with adaptability in mind, so that future upgrades in both camera and computer technology could be easily accommodated as they were required throughout the project and upgrades could be made for future projects. Updates to older systems were achieved by upgrading hardware to cope better with site conditions and the use of newer operating systems, making compatibility with new camera technologies and software simpler. This
RAID system successfully simplified previous RAID designs, using fewer machines, but still with the potential to be expanded and replicated for future more complex experiments.
The control systems and autonomous nature of the up and downstream equipment, mean that complete control after booting is available from the control room, a quarter of a mile away. Even if there is a power surge or test interruption the entire system can be rebooted without any loss of data from long term memory. This should allow for multiple tests to be carried out in quick succession, despite problems and errors, keeping the time that the equipment needs to be in the
NTF to a minimum.
The support structures of previous experiments were successfully analysed and redesigned to meet the test specifications of 3 new engine tests. These ranged from conventional stereo PIV of the downstream portion of the exhaust plume to new ground breaking experiments using high speed
Executive Summary - Page 12 of 16
PIV and density measurements. As a result of this range of testing, and the advent of transitioning seamlessly from high speed to low speed PIV, the rig structure needs to accommodate a greater range of flexibility than previous projects. This placed more design emphasis, than previous years’ projects, on multi purpose rig components. This has meant that FEA testing of support structures has been a time consuming but necessary factor, outlining flawed designs and required alterations.
The final construction of the support structures has been more dependent on external suppliers than with previous projects, as it has often been more economical and faster to outsource complex rig constructions to specialist rig manufacturing companies. However this outsourcing process has been negotiated and handled successfully through good team management and a clear idea of what is required from each structure.
The group has successfully met the majority of the aims for this project, meeting all of the specified requirements to perform a velocity and turbulence mapping of the region close to the wing and the engine using a conventional low speed stereo PIV system. A 3 camera stereo PIV system for data acquisition of velocity and turbulence mapping has also been achieved for the portion of the exhaust from 5-20 diameters downstream of the engine nozzle exit. Where the aspirations of Rolls Royce have not been met, are to perform the velocity and turbulence mapping of the upstream region using high speed cameras and a high speed laser capable of collecting data at a rate of 4kHz. The limitation for this was the high speed laser as 4kHz was not achieved using existing lasers within the
Optical engineering department. Although 4kHz was achievable the energy emitted from the laser is exponentially reduced as frequency increases. This means that the light pulses created by the laser are not bright enough to reach the required illumination of particles.
Executive Summary - Page 13 of 16
6 Works Cited
Alvare, P., Diez, F. J., Pothos, S., Troolin, D., & Vanderwerker, P. B. (2006). High speed time resolved
PIV measurements of particle laden jets in crossflows. 59th Annual Meeting of the APS Division of
Fluid Dynamics.
Andersen, N. A. (2007, May). Camera Technology and Advanced Imaging Applications. Retrieved
April 2010, from Dantec Dynamics: http://www.uni-kassel.de/ucgipub/content/typo3/fileadmin/groups/w_090900/SolNet/Lyngby/Excursions/Cameras_and_Advance d_PIV_-_DTU_2007.pdf
Boillot, A. a. (1996). Optimization procedure for pulse separation in cross-correlation PIV.
(Experiments in Fluids 21(2), 87-93).
Bretl, W. E. (2000, May 21). Digital Camera Exposure Problem. Retrieved March 2010, from http://www.bretl.com/Digital%20Photography/DigPhot%20topics/Exposure/Exposure.htm
Bryanston-Cross, P. (2010). Particle Image Velocimetry (PIV) Principle of Operation. Remote Sensing
and Global Modelling Lecture Series . University of Warwick.
Bryanston-Cross, P. (2002, January 26). Particle Image Velocimetry. Retrieved March 2010, from http://www.eng.warwick.ac.uk/staff/pbc/courses/undergrad/lecture_14.htm eFluids. (1998). PIV: Particle Image Velocimetry. Retrieved April 2010, from http://www.efluids.com/efluids/pages/products/piv.htm
eFunda: Introduction to Hot-Wire Anemometers. (n.d.). Retrieved from http://www.efunda.com/designstandards/sensors/hot_wires/hot_wires_intro.cfm
Elsinga, G. E., Wieneke, B., Scarano, F., & Schröder, A. (2008). Tomographic 3D-PIV and Applications .
In Particle Image Velocimetry (pp. 103-125). Berlin / Heidelberg: Springer .
German Aerospace Center (DLR). (2010). Principal PIV-Setup. Retrieved April 2010, from 2. http://www.dlr.de/as/en/desktopdefault.aspx/tabid-183/251_read-12796/gallery-1/gallery_read-
Image.5.1574/
Michaeliss, D., & Wienke, B. (07-10 July 2008). Comparison between Tomographic PIV and Stereo
PIV. 14th Int Symp on Applications of Laser Techniques to Fluid Mechanics. Lisbon, Portugal.
Executive Summary - Page 14 of 16
Microsoft. (2005, March 8th). Microsoft Storage: Fact and Fiction. Retrieved November 21st, 2009, from http://www.microsoft.com/windowsserversystem/storage/getstorfacts.mspx
OPTI, T. (2010). OPTI Trilite Structural Systems Imperial. Retrieved April 2010, from http://www.optikinetics.com/truss/index.php
Oxford Lasers Ltd. (n.d.). Neo Nd:YAG Laser | Oxford Lasers. Retrieved March 2010, from http://www.oxfordlasers.com/imaging/lasers/neo.htm
Parliamentary Office of Science and Technology. (2003, June). Retrieved March 2010, from http://www.parliament.uk/post/pn197.pdf pco.imaging. (2004). pco. Camera user manual. Retrieved April 2010, from http://www.pco.de/fileadmin/user_upload/db/download/MA_DCOPIE_0412b.pdf
Photonics Online. (2010). CCD cameras. Retrieved April 2010, from http://www.photonicsonline.com/product.mvc/CCD-Cameras-0002?VNETCOOKIE=NO
QinetiQ. (2004, July 19). QinetiQ's Engine Noise Test Facility. Retrieved April 2010, from http://www.qinetiq.com/home/newsroom/news_releases_homepage/2004/3rd_quarter/qinetiqs_e ngine_noise_test_facility.html
Rotadata. (2009). Circumferential Actuated Traverse Systems. Retrieved April 2010, from http://www.rotadata.com/pages/products/actuated_traverse2.php
Samsung. (2009). SAMSUNG Semiconductor - Products - Flash - Flash SSD. Retrieved March 2010, from http://www.samsung.com/global/business/semiconductor/products/flash/Products_FlashSSD.html
Shelquist, R. (2009, June). Equations - Air Density and Density Altitude. Retrieved March 2010, from http://wahiduddin.net/calc/density_altitude.htm
Skeen, A. (2006). The development of high-speed PIV Techniques and their application to jet noise measurement. Chapter 1 – Coaxial Jet Noise Project: Experiment Design .
Telecommunications Industry Association. (2001). ANSI/TIA/EIA-568-B. Retrieved April 20th, 2010, from Telecommunications Industry Association: http://www.belden.com/pdfs/Techpprs/2050.pdf
TSI Incorporated - categories - laser doppler velocimetry. (n.d.). Retrieved from http://www.tsi.com/en-1033/categories/laser_doppler_velocimetry.aspx
Executive Summary - Page 15 of 16
University of Warwick. (n.d.). Laser Safety. Retrieved March 2010, from - http://www2.warwick.ac.uk/services/safety/health_and_safety/policy/lasersafety.pdf
University of Warwick. (n.d.). School of Engineering Safety Handbook. Retrieved March 2010, from http://www2.warwick.ac.uk/fac/sci/eng/local/hands/
Welcome to Silicon Software. (n.d.). Retrieved March 2010, from http://www.silicon-software.de/
Whybrew, D. A. (2009). High Speed Imaging. Retrieved April 2010, from http://www.velocimetry.net/downloads/High%20Speed%20Imaging%20-%20Whybrew.pdf
Zener, C. (1948). Elasticity and Anelasticity of Metals. Chicago: University of Chicago Press.
Executive Summary - Page 16 of 16