May 2015 Intel Project Monthly Report Next
advertisement

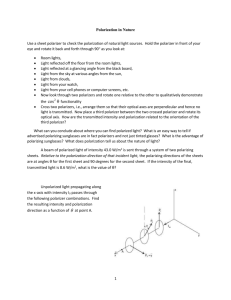
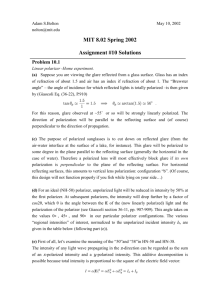
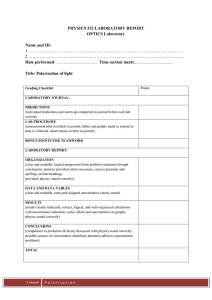
May 2015 Intel Project Monthly Report Next-Generation Cooperative Vehicle Safety System Current team members: Champion: Dr. Xingang Guo & Dr. Richard Roberts PI and co-PI: Prof. Hsin-Mu (Michael) Tsai and Dr. Kate Ching-Ju Lin Students: Chia-Fu Li (Master), Hua-Yen Tseng (Master), Hsin-I Wu (Master), Hui-Yu Lee (Master), Chung-Lin Chan (Master), Jing-Yeu Chen (Master), Ai-Ling Chen (Master), You-Lin Wei (Master), Kuan-Ting Chen (Master) Communication with the champion: We shared our MobiSys presentation slides and final version of the paper with Rick and asked for his comments for how to amend these materials to create the submission to IEEE 802.15.7r1, as part of the effort to standardize our RollingLight (RS-FSK) waveform. Rick suggested us to add additional description of the frame format. Rick also gives us a heads-up on a potential competitive waveform Panasonic comes up with. Progress: 1. Angle estimation using polarizer pattern on LED Indoor positioning is a popular topic in recent years. Because GPS does not work well in indoor environment, many researches focus on indoor positioning using RF signals or visible light. One of the main ideas is marker based positioning. Through some customized markers, cameras can extract the position information when capturing videos in different viewing angle. However, most of these markers put in the physical environment have the problem of exhibiting weird or ugly appearance. Thus, we try a polarization-based positioning, which creates “invisible markers”. A polarizer can transform normal light, or unpolarized light, into light of a particular polarization direction, which is imperceptible to human eyes. When the polarized light pass through the second polarizer, the intensity will be deducted following Iθ = 𝐼0 cos 2 𝜃 Where θ is the angle between the polarization directions of the two filters. According to this, if we put a polarizer in front of a light source, and the second in front of the camera, the images capture by the camera show different light intensity according to the irradiance angle, shown below. We hope to extract the exact viewing angle from the pattern captured in the image. Thus, we perform a small experiment to measure the intensity of each cell in the marker pattern captured at different viewing angles. The result is shown below. The pictures here show a clear cosine wave with respect to the viewing angle. Thus we believe it is possible to perform accurate positioning according to the light intensity embedded in the pixel values of different cells in the marker pattern. Brief plan for next month: 1. Radiation pattern measurement for the taillight, headlight, daytime running light of the new test vehicle. 2. Implementation of 3-camera receiver CamCom (bandwidth expansion) and performance evaluation. 3. Design the pattern of polarizer and the algorithm to estimate the viewing angle of each polarizer according to the pixel value.