Yen-Yi_Juo_Robotic_LESS_case_report_Manuscript_11112013

Robot-Assisted Single-Incision Total Colectomy: A Case Report
Yen-Yi Juo, M.D., M.P.H., Vincent Obias M.D., M.S.
From the Department of Surgery, George Washington University Hospital, Washington DC, USA
Address all correspondence to:
Vincent Obias, M.D.
Assistant Professor of Surgery,
Division Director of Colon and Rectal Surgery,
22 nd & I Street, NW
6 th Floor
Washington, DC 20037
Phone: (202) 741-3219
Email: vobias@mfa.gwu.edu
Sources of Financial Support: None
Manuscript Category: Original Article
Text Word Count: 1,870
Number of Figures: 4
ABSTRACT
Background:
Literature shows that robots provide an opportunity for meeting technical challenges associated with
Laparo-endoscopic Single Site Surgery (LESS). Following previous success with robot-assisted singleincision right hemicolectomy, we report our experience with robot-assisted single-incision total colectomy.
Methods:
Through a single incision around the umbilicus, three robotic ports and a laparoscopic port were placed through the GelPOINT. With one intraoperative redocking of the robot, we were able to access both right and left side of the colon. The entire colon was externalized through the GelPOINT and the umbilical incision closed in layers.
Results:
The entire procedure took 227 minutes. There was minimal blood loss. The patient was discharged on post-operative day four with no complications. No wound site complications were observed in clinic one week after discharge.
Conclusions
Robot-assisted single-incision total colectomy is a feasible procedure associated with little increase in operative time.
INTRODUCTION
Laparo-endoscopic Single Site Surgery (LESS) was developed as an alternative to conventional laparoscopic surgery in order to minimize port-related complications, recovery time, pain, and cosmesis.
1,
2 So far, LESS has been shown to be at least as feasible and safe as its conventional laparoscopic counterpart in limited procedures such as cholecystectomy 3 and appendectomy 4 . However, due to the crowded instrument access space, the development of LESS in more complex procedures was fraught with technical challenges due to decreased instrument maneuverability and frequent instrument clashing.
5,
6 This led to the idea of introducing the robotic platform into LESS, whereby the finer instrument articulation and a “cross arm” technique 7 unique to robotic consoles may overcome the previously encountered technical difficulties.
8, 9
In the field of colorectal surgery, laparoscopic colectomy has been shown to be associated with significantly lower mortality, complication rate, length of stay, and hospitalization cost.
10 However, the use of LESS colectomy has not been popularized due to its technical difficulties.
11, 12 Recently, several case reports and case series have demonstrated the safe use of the robot-assisted single-incision approach for partial resections of the colon, such as cecectomy and right hemicolectomy.
13-15 However, several unique technical challenges, such as loss of pneumoperitoneum and instrument proximity, 14 have been encountered during these early trials. We hypothesized we could use a single fascial incision device
(GelPOINT Advanced Access Platform; Applied Medical Inc. Rancho Santa Margarita, CA, USA) for incisional wound protection and a “cross arm” technique to overcome these challenges. Also, we sought to exploit the advantages offered by the robotic LESS procedure in a more extensive colectomy by intraoperatively re-docking the robot to allow for anatomical access to the left side of the colon as well.
Here we present our technique utilizing a robotic platform for a single-incision total colectomy.
MATERIAL AND METHODS
A 38-year-old female with Familial Adenomatous Polyposis (FAP) presented with colonoscopic finding of large carpet lesions in the right colon, multiple polyps in the transverse, left, and sigmoid colon, and few polyps were observed in the rectum. She had history of desmoid tumors of the skin on her back and abdominal wall, an osteoma of the left upper arm, as well as extensive family history of FAP, including her father, who passed away due to rectal cancer. She presented with the explicit request for robot-assisted single incision laparoscopic total colectomy for prevention of cancer development and reduction of desmoids formation.
After induction of anesthesia, patient was placed in the lithotomy position with both arms tucked and then prepped and draped in a sterile fashion. A 3 cm midline vertical incision was made through the umbilicus, followed by a 4 cm fascial incision. A single-port access device (GelPOINT Advanced Access
Platform; Applied Medical Inc. Rancho Santa Margarita, CA, USA) was introduced through the incision.
The abdomen was then insufflated with CO
2
through the gelPOINT with a pressure setting of 8 mmHg. A laparoscopic camera was introduced through the trocar for the preliminary examination of the bowels before the initial laparoscopic trocar was withdrawn.
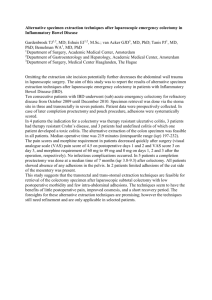
The patient was tilted with her right side up in slight Trendelenburg position to allow better visualization of the ascending colon. An 8.5 mm robotic camera port, two 8.5 mm robotic instrument ports, and a 10 mm laparoscopic port were placed through the GelPOINT. (See photo 1 for port placement layout) The robot (da Vinci Si-type Surgical System; Intuitive Surgical Inc., Sunnyvale, CA,
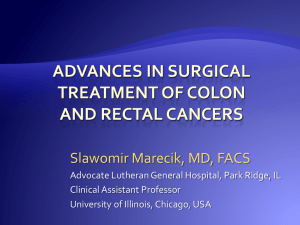
USA) was then docked from the right shoulder of the patient with the base of the robot positioned at an angle to the bed. A 30 degree robotic scope in the up position was introduced through the camera port and placed below the two robotic arms. The assistant stood to the left of the patient and held a bowel grasper through the 10 mm laparoscopic port to assist with traction and exposure. (See diagram 1 for relative
positioning of patient, assistant, and robot) The robotic instruments were then inserted and their shafts were crossed below the fascia. At this point the control of the master arms on the robotic console were switched so that the right robotic arm was assigned for the surgeon’s left while the left robotic arm was assigned for the surgeon’s right. Thus, the surgeons right hand would be controlling what looked to be the right instrument in the abdomen, which in reality is the left instrument crossing over. And vice versa.
First, the ileocolic artery was isolated and divided with the robotic vessel sealer (da Vinci Vessel
Sealer; Intuitive Surgical Inc., Sunnyvale, CA, USA). A dissection separating the transverse colon and the ascending colon from the retroperitoneum via a medial-to-lateral approach was undertaken. The right branch of the middle colic artery was identified and divided with a robotic vessel sealer. After gaining access into the lesser sac, the entire right colon, cecum, and distal small bowel were mobilized away from the right side of the abdomen. The omentum was then separated from the transverse colon in a leftto-right fashion towards the splenic flexure in order to open up the lesser sac and separate the transverse colon from the stomach. The remaining mesentery of the transverse colon was taken in a proximal-todistal fashion with a robotic vessel sealer up to the splenic flexure.
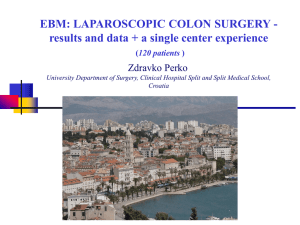
At this point, the robot was re-docked from the left side of the patient. This redocking took 11 minutes. The instruments were inserted through the GelPOINT in a similar fashion as described above, except the assistant port is now to the right of the patient. (See diagram 1 for relative positioning of patient, assistant, and robot) The superior rectal artery and the ureter running underneath it were identified, and the artery was taken with the robotic vessel sealer. The remaining mesentery of the descending colon was taken with the robotic vessel sealer in a distal-to-proximal fashion until it meets with the cut end of the transverse colon mesentery, at which point the entire mesentery of the colon was freed. The entire left colon was then mobilized by dissecting inferiorly along the white line of Toldt to the upper rectum. The colon was separated from the rectum using a 45 mm Echelon Stapler and Cutter with Blue Load (Ethicon
Endo-Surgery, Inc.; Cincinnati, OH, USA). After injecting the patient with Indocyanin Green, the perfusion of the rectal stump was checked using the near-infrared capability of the robotic camera (da
Vinci Firefly Fluorescence Imaging Vision System; Sunnyvale, CA, USA), which demonstrated good blood flow.
The robot was undocked at this point and the entire colon exteriorized through the GelPOINT.
The terminal ileum was transected immediately proximal to the ileocecal valve. A single-0 Prolene purse string suture was placed at the distal end of the ileum. EEA TM 29mm Single-Use Stapler Anvil was then tied in and the perfusion of the distal ileum was again checked using a Firefly, which demonstrated good blood flow. The remainder of the procedure was performed laparoscopically. Placing the EEA TM 29mm
Single-Use Stapler through the anus to the top of the rectal stump, which is about 15 cm away from the anal verge, and meeting the anvil placed in distal ileum, an end-to-end anastomosis was made. The rectal stump was then insufflated with air. The anastomosis showed no air leak upon inspection under water.
The abdominal cavity was inspected to ascertain that there was no obvious bleeding at cut mesenteric edges nor twisting of the remaining mesentery. The laparoscopic camera was withdrawn and the GelPOINT removed. Fascia was closed with 1-0 PDS transversally and irrigated with saline. The umbilical incision was closed with subcuticular sutures using 4-0 Monocryl stitches and then injected with .25% Marcaine with epinephrine. The patient was extubated before leaving the operation room.
From incision to skin closure, the entire procedure was performed in 227 minutes.
The patient was discharged 4 days after the operation after prompt return of bowel function.
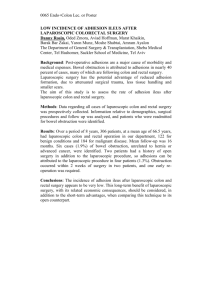
There was no postoperative complication. The pathology report showed multiple tubular adenomas across the entire specimen. The patient was seen at clinic one week after discharge with good recovery and a barely noticeable wound inside her umbilicus (see photo 2).
DISCUSSION
Our experience using a robot-assisted single-incision approach for total colectomy showed that the procedure was safe and feasible when performed our center. The robot provided a solution to technical challenges that previously limited the development of single-incision laparoscopic procedures, such as instrument clustering and poor visualization , with the use of the “cross arm” technique and the finer articulation of 8mm robotic instruments. Besides capitalizing on these advantages reported in previous literature, our experience with the procedure found the following advantages associated with a robot-assisted approach in single-incision colectomy.
Little previous literature of robot-assisted single-incision colectomies has exploited the possibility of placing an additional assistant port with the robotic ports all through the gelPoint. In the past, due to instrument crowding, the role of the assistant was limited to holding the camera during conventional single-incision laparoscopic surgeries. Now, with the robot holding the camera in a steady manner, the assistant could provide traction for better visualization or facilitate other maneuvers by providing countertraction or suction through a fourth port. Previous studies comparing robotic and human camera holders showed no significant difference in operation time or postoperative outcome 16 . Also, with the weight of the patient’s abdominal wall and overlying organs supported by the robotic arms, better ergonomics could be achieved for the assistant. The introduction of an additional trocar through the GelPOINT provided increased ease of operating without enlargement of the incision or additional ports away from the single incision access.
One of the reasons previous case series of robot-assisted single-incision colectomy have been limited to partial resections was the concern that intraoperative re-docking of the robot could take up a significant amount of time. In fact, one of the main criticisms of robot-assisted colectomy has been the prolonged operative time 17, 18 . Literature showed that the prolonged operative time was mostly associated with the time spent on robot docking 19 . However, most of these data stemmed from early experiences in
institutions just about to start using the robot. With increased experience, we found that significant reduction in operative time could be achieved, to the extent where the operative time of robotic colectomy were comparable to laparoscopic colectomy, and this finding has been echoed in other institutions as well 20, 21 . Our surgical team had extensive experience with robot-assisted colorectal procedures. Our first attempt at robot-assisted single-incision total colectomy took 227 minutes to perform, during which 11 minutes were spent for the intraoperative re-docking of the robot. We believed that this extra 11 minutes was not a necessary vice since the advantages provided by the robot more than make up for the redocking.
Laparo-endoscopic Single Site Surgery provided all the advantages associated with conventional laparoscopic surgery, but with better cosmesis and less trauma to the abdominal wall. Its development has been limited by its inherent technical difficulties. With the introduction of the robotic console, a much wider application of the single site surgical approach was now possible. Our case report of a robotassisted single-incision total colectomy demonstrated the possibility of access to the entire width of the abdominal cavity through a single umbilical incision and this was the first mention of this technique in the literature. Future studies would be necessary to demonstrate clinical advantages of the robot-assisted approach in LESS in comparison with the conventional laparoscopic approach.
REFERENCE
1.
2.
3.
4.
5.
6.
7.
Carus T. Current advances in single-port laparoscopic surgery. Langenbecks Arch Surg. Sep 15.
Tacchino R, Greco F, Matera D. Single-incision laparoscopic cholecystectomy: surgery without a visible scar. Surg Endosc. Apr 2009;23(4):896-899.
Resch T, Sucher R, Pratschke J, Mittermair R. [Single Incision Laparoscopic Cholecystectomy
(SILC) - A Novel Technique in Comparison with the Gold Standard.]. Zentralbl Chir. Sep 10.
Hua J, Gong J, Xu B, Yang T, Song Z. Single-Incision Versus Conventional Laparoscopic
Appendectomy: A Meta-analysis of Randomized Controlled Trials. J Gastrointest Surg. Sep 4.
Ostlie DJ, Juang OO, Iqbal CW, et al. Single incision versus standard 4-port laparoscopic cholecystectomy: a prospective randomized trial. J Pediatr Surg. Jan;48(1):209-214.
Baik SM, Hong KS, Kim YI. A comparison of transumbilical single-port laparoscopic appendectomy and conventional three-port laparoscopic appendectomy: from the diagnosis to the hospital cost. J Korean Surg Soc. Aug;85(2):68-74.
Obias V, Sanchez C, Nam A, Montenegro G, Makhoul R. Totally robotic single-position 'flip' arm technique for splenic flexure mobilizations and low anterior resections. Int J Med Robot.
Jun;7(2):123-126.
Yao W, Childs PR. Application of design rationale for a robotic system for single-incision 8.
9.
laparoscopic surgery and natural orifice transluminal endoscopic surgery. Proc Inst Mech Eng H.
Jul;227(7):821-830.
Autorino R, Kaouk JH, Stolzenburg JU, et al. Current status and future directions of robotic single-site surgery: a systematic review. Eur Urol. Feb;63(2):266-280.
10.
Hirasaki Y, Fukunaga M, Sugano M, Nagakari K, Yoshikawa S, Ouchi M. Short- and long-term results of laparoscopic surgery for transverse colon cancer. Surg Today. Aug 11.
11.
Watanabe M, Murakami M, Kato T, Onaka T, Aoki T. Rational manipulation of the standard laparoscopic instruments for single-incision laparoscopic right colectomy. Int Surg. Jul-
Sep;98(3):205-209.
12.
Park JW, Sohn DK, Park S, et al. Safety and Efficacy of Single-Port Colectomy for Sigmoid
Colon Cancer: A Phase II Clinical Trial. J Laparoendosc Adv Surg Tech A. Sep;23(9):745-750.
13.
Ragupathi M, Ramos-Valadez DI, Pedraza R, Haas EM. Robotic-assisted single-incision laparoscopic partial cecectomy. Int J Med Robot. Sep;6(3):362-367.
14.
Ostrowitz MB, Eschete D, Zemon H, DeNoto G. Robotic-assisted single-incision right colectomy: early experience. Int J Med Robot. Dec 2009;5(4):465-470.
15.
Singh J, Podolsky ER, Castellanos AE, Stein DE. Optimizing single port surgery: a case report and review of technique in colon resection. Int J Med Robot. Jun;7(2):127-130.
16.
Fujii S, Watanabe K, Ota M, et al. Solo surgery in laparoscopic colectomy: a case-matched study comparing robotic and human scopist. Hepatogastroenterology. Mar-Apr;58(106):406-410.
17.
Shin JY. Comparison of Short-term Surgical Outcomes between a Robotic Colectomy and a
Laparoscopic Colectomy during Early Experience. J Korean Soc Coloproctol. Feb;28(1):19-26.
18.
deSouza AL, Prasad LM, Park JJ, Marecik SJ, Blumetti J, Abcarian H. Robotic assistance in right hemicolectomy: is there a role? Dis Colon Rectum. Jul;53(7):1000-1006.
19.
Trastulli S, Desiderio J, Farinacci F, et al. Robotic right colectomy for cancer with intracorporeal anastomosis: short-term outcomes from a single institution. Int J Colorectal Dis. Jun;28(6):807-
814.
20.
Deutsch GB, Sathyanarayana SA, Gunabushanam V, et al. Robotic vs. laparoscopic colorectal surgery: an institutional experience. Surg Endosc. Apr;26(4):956-963.
21.
D'Annibale A, Pernazza G, Morpurgo E, et al. Robotic right colon resection: evaluation of first 50 consecutive cases for malignant disease. Ann Surg Oncol. Nov;17(11):2856-2862.
Figure Legends
Figure 1: Instrument port layout on GelPOINT (patient’s feet to the left of the photo): clockwise from the top, a 10mm laparoscopic assistant port, a 8.5 mm robotic instrument port, a 8.5mm robotic camera port, and a 8.5mm robotic port.
Figure 2: Umbilical incision wound on post-operative day 7
Figure 3 & 4: Relative positioning of patient and robotic ports during first (Figure 3) and second (Figure 4) portion of the operation. C: Camera port, 1: Left robotic arm, 2: Right robotic arm, 3: Laparoscopic assistant port