Lesson 18 (1) Force on a Current Loop in a Uniform Magnetic field
advertisement
 Force on a Current Loop in a Uniform Magnetic field")
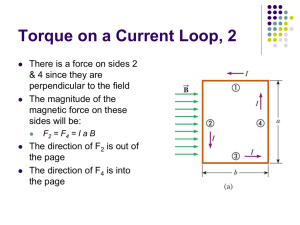
Lesson 18 (1) Force on a Current Loop in a Uniform Magnetic field For an arbitrary current loop in a uniform magnetic field, the total force is F= ò Id ´B= I ( ò d )´B = 0 The loop will not undergo translational acceleration. Instead, it can turn. (2) Torque Consider a force F acting on a point P of an object. Choose any point O in space and define the vector r to be the displacement vector from O to P. We define Torque of F about O t = r ´ F If a number of forces act on an object, and the sum of the forces is zero, the total torque is independent of the choice of the point O. Proof: Let another point O be chosen to calculate torque, and denote the displacement vector from O to O be a , that from O to the point P by r . Then r F r a F r F a F r F The torque vector for a force couple (two forces of equal magnitude and opposite directions) is shown. The magnitude of the torque is F d where d is the shortest distance between the lines of actions of the forces. 1 The relation between the sense of rotational motion caused by the torque and the direction of the torque vector is given by a right hand rule: holding a fist with your right hand with thumb stuck out pointing in the direction of the torque vector, the fingers indicate the sense of rotational motion. (actually acceleration) (3) Torque on a Current Loop and Magnetic Moment Consider a rectangular loop ABCD with width w and length as shown: w B A N S C D The top view of the loop and magnet is shown below: FDA A w θ B FBC The forces on the four sides of the loop are FAB FCD FBC FDA IwB sin 2 IwB sin 2 IB down IB up out of paper int o paper and they cancel in pairs. While the first two forces have no effect on the motion of the loop, the last two forces form a force couple that tends to rotate the loop in the clockwise direction. The magnitude of the torque of this force couple is 2 FBC w sin IwB sin IAB sin where A w is the area of the loop. Using the right hand rule, the direction of is into the paper. We now define the magnetic moment of an N-turn current loop of area A with current I as follows: NIA Direction given by right hand rule Here the right hand rule is as follows: On right hand fist with stuck-out thumb, the fingers represent the direction of current in the loop, and the thumb gives the direction of . In terms of the magnetic moment, the torque on the rectangular wire loop can be found from B The action of a magnetic field on the magnetic moment of a current loop is similar to the action of electric field on an electric dipole moment vector, which points from the negative to the positive charge. At equilibrium, the torque on a current loop is zero. This occurs when is parallel or anti-parallel to B . Stable equilibrium corresponds to the former case. (4) Proof of the torque on current loop formula in general Proof: Consider an arbitrary current loop on the x-y plane in the presence of a uniform magnetic field B Bˆj . The force on an element d is dF Id B I dxiˆ dyˆj Bˆj IBdx kˆ 3 The torque about the origin of this force is d r dF xiˆ yˆj IBdx kˆ IBxdxˆj IBydx iˆ The total torque is d IB xdxˆj ydxiˆ IBA iˆ IABkˆ ˆj B Here we have used the following integrals: xdx 0 ydx A (4) The electric Motor The operation of a DC motor relies on the rotation of a wire loop inside a magnetic field that arises when a current is sent through the wire. Visit the following website for a simulation of a dc motor. http://www.ul.ie/~gaughran/flynn/dcmotor.html The directions of various vectors and the sense of rotation of the loop are sketched as shown. To keep rotating in the same direction, the direction of the current must be reversed in a half cycle. For example, the current on the left arm of the loop in the diagram must always point out of the paper even though after half a cycle, the arm is 4 replaced by the other one. This reversal of current is accomplished by the spit-ring commutator. (5) Energy of a Current Loop in a Magnetic Field This energy is calculated from the work required to rotate the current loop. For that we first need the expression for the work done by a torque on an object. For simplicity, let the object be a rod of length L , and a force F acts perpendicularly to the rod at one end, so that the torque about the other end is t = FL turning the rod in the counter-clockwise direction. Let q be the angle between the rod and the x-axis, increasing in the counter-clockwise direction. When the rod rotates through the angle dq , the distance travelled by the end of the rod where the force acts is Ldq , so that the work done by this force is dW = FLdq = t dq and is also the work done by the torque. If the rod is replaced by the magnetic moment vector of a current loop as shown, and the magnetic field is in the positive x-direction, the torque has magnitude m Bsinq and its direction is into the paper. It therefore tends to rotate the magnetic moment vector clockwise, and we can write t = -m Bsinq 5 The increment of energy of the loop is equal to the work done against this torque: dU = -t dq = m Bsinq dq Upon integrating, U = -m Bcosq + C Choosing as a reference q = p 2 to be where U = 0 , the constant C = 0 . The energy is U = -m Bcosq = -m × B The dependence of U on q is sketched below. The energy is minimum at q = 0 , when the magnetic moment is parallel to the magnetic field. 6