Abstract - Friedrich-Schiller
advertisement

JAMS - a Software Framework for
Integrated Environmental Modelling
Sven Kralisch, Peter Krause and Christian Fischer
Department of Geoinformatics, Hydrology and Modelling, School of Chemical and Earth Sciences,
Friedrich Schiller University, Jena, Germany
Email: sven.kralisch@uni-jena.de
Abstract
The pressures on environmental systems are increasing worldwide due to population growth, socioeconomic development and the consequences of climate change. Therefore, adaptable tools and
methods are needed to elaborate information, develop understanding and create strategies for the
sustainable use and management of such systems. These tools should assist scientists, natural resource
managers and decision makers by providing information about the system’s state and help them to
identify suitable management strategies, estimate their performance and quantify the impact of future
development scenarios.
These objectives are tackled by simulation models that can cope with components and processes of
environmental systems, e.g. the hydrological and nutrient cycles. Modelling frameworks and
accompanying standards that allow for an easy implementation and extension of such models have
therefore gained increasing attention from both model developers and users during the last years.
The Jena Adaptable Modelling System (JAMS) is an open-source software framework that has been
especially designed to address the demands of process-based environmental model development and
various aspects of model application. The model design and implementation stage is supported by (i)
the explicit representation of the spatial and temporal domains via appropriate data types, (ii) a strong
separation of process simulation components from the description of more complex models, and (iii)
the use of annotations to provide detailed meta-information on the purpose of simulation components
and the meaning of their input and output data. In addition, JAMS supports the model application
stage by providing (i) flexible interfaces for the input and output of environmental data, (ii) powerful
parameter optimization and uncertainty analysis methods, (iii) service-oriented runtime environments
for remote and grid-based model execution, and (iv) user-friendly functions for the analysis and
visualization of environmental data.
Graphical user interfaces support JAMS users during all stages of model development and application.
A model building and parameterization front-end assists users during the creation of problem-tailored
models and with the definition of model-related parameterization interfaces. The calibration of
existing models is supported by a special graphical assistant which guides users during the setup and
application of different state-of-the-art parameter optimization algorithms. A data explorer finally
facilitates the analysis of JAMS models by providing plot and map visualizations of a model's
input/result data and with the MCAT5 toolbox that offers powerful functionalities for the sensitivity
analysis of environmental simulation models. In addition, a web-based user interface allows the
definition and deployment of server-side model simulation and calibration tasks, thus providing easy
access to high performance computing facilities.
This paper will present the JAMS core concepts and give an introduction to models, simulation
components and supporting tools already available for that framework. Sample applications will be
used to underline the advantages of component-based model designs and to show how JAMS can be
used to address the challenges of integrated environmental modelling.
1 Introduction
To tackle problems of integrated water resources management, like e.g. raised by the implementation
of the European Water Framework Directive, flexible and powerful simulation models are needed in
order to analyse the current state of environmental systems or to project their future dynamics under
predefined development scenarios. Especially in cases where domain-specific models cannot easily be
extended to meet given modelling requirements, model coupling is a promising approach to create
integrated solutions for the detailed consideration of a wide variety of different environmental
processes. The systems that have emerged during the last two decades to address this requirement
range from pure interface solutions that focus more on coupling of already existing models to
simulation frameworks that also cover the creation of problem-tailored simulation components along
given requirements. Systems of the first group are usually less focused on specific scientific domains
and applications and rather provide standardized interfaces that existing models can be adapted to,
allowing for broader and more standardized model coupling approaches. Examples are the Common
Component Architecture (CCA), the High Level Architecture (HLA) or the Open Modeling Interface
(OpenMI). Systems of the second group usually provide a software architecture (e.g. by means of
interfaces and abstract classes) that (i) specifies how modelling components inside the framework need
to be structured and how they can interact with each other, and (ii) that controls the creation, linkage
and execution of components. While some of them also support the integration of existing, legacy
components (e.g. by using code wrapping) these systems usually focus on the implementation of
framework-compliant code. Examples are the Modular Modelling System (MMS), the Object
Modelling System (OMS), The Invisible Modelling Environment (TIME) or LIQUID, all of them being
specialized in the creation of hydrology-related models. An overview of state-of-the-art modelling
frameworks can be found in Jagers (2010).
The objective of this paper is to present the Jena Adaptable Modelling System (JAMS). Originally
developed with a focus on hydrological process simulation, it is a framework for environmental
simulation model development and application in general (Kralisch and Krause 2006). JAMS aims on
simulating environmental processes at discrete points in time and/or space. Such systems, often
referred to as timed event system, are widely-used by many distributed hydrological models applied in
current practice. JAMS is developed as open source software under the GNU Lesser General Public
License and maintained at the Department for Geoinformatics, Hydrology and Modelling of the
Friedrich-Schiller-University of Jena, Germany. Its major focus is not on the coupling of existing,
complex environmental models but rather on the creation of problem-tailored models from welldefined, scientifically sound process simulation components. As an example, these components
simulate interception, potential evapotranspiration or soil temperature based on physically based
algorithms. Depending on the model’s purpose and available input data, a user can choose from the
available process implementations that best matches her or his demands. But JAMS is not just a
framework for component coupling, but also contains tools and graphical user frontends that support
all stages of a model’s design and application lifecycle, like configuration, calibration, sensitivity and
uncertainty analysis, and the exploration and visualization of modelling results.
Using JAMS, scientists can implement their expert knowledge as simulation components, even if little
information about the later application context might be available at this stage (e.g. other components
they might be coupled with). While providing a rich set of features useful for the application of
simulation models (e.g. saving a models state during simulation for later continuation or providing
server based and parallel execution environments), the framework’s invasiveness is minimized as
much as possible in order to ensure a fast learning process. Process components implemented for
JAMS and models constructed from them mainly focus on the simulation of the hydrological and
nutrient cycle (Kralisch et al., 2007).
The next section will give an overview of the JAMS architecture, its main concepts, model building
blocks and dynamic runtime behaviour. Section 3 is dedicated to introduce various JAMS support
tools covering the design and deployment of models as well as their calibration and analysis. Finally,
section 4 will give a short overview of currently available JAMS-models and list some example
applications.
2 System description
2.1 Framework overview
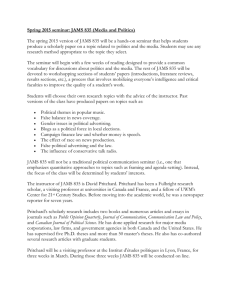
The JAMS framework is structured into three main sections, i.e. (i) the core library, (ii) the runtime
system, and (iii) the base component repository. The core library contains the API definition and
different global support functions, e.g. for loading models or model data I/O. The application of
models is managed by the runtime system, which is responsible for loading and executing JAMS
models and provides additional services for event logging or profiling. The base component repository
offers standard functions often used in environmental simulation models, e.g. providing geospatial
processing capabilities. These central sections are complemented by different support tools and a
graphical user frontends that are described in section 3. Interactions and dependencies between JAMS
elements are depicted in Figure 1. The core library provides interfaces and data types both for the
creation of modeling components and the runtime system. The latter can create and execute a JAMS
model by accessing the component repository and a model definition, which is provided as a XML
document. The creation of model definitions is supported by graphical user frontends covering the
selection, linkage and parameterization of modeling components.
Figure 1: JAMS framework elements
2.2 Model building blocks
The main building block of any JAMS model is named component. A component is a JAVA class that
implements three different methods (i.e. init, run and cleanup) that are triggered at according runtime
stages that a JAMS model iterates through. As indicated by their name, these methods are executed at
the beginning, in-between and at the end of a component’s lifetime. While the init and clean methods
are executed only once, the run method can be invocated multiple times depending on the
component’s purpose. Communication with the framework and other components is handled by
arbitrary public attributes that fulfil two conditions: (i) they are of a valid JAMS data type and (ii) they
are marked by a special JAVA annotation, i.e. a syntactic meta-information. Attribute annotations are
used for defining their I/O type (read, write), their default values, physical unit and boundaries (if
numeric), and a text describing the attribute’s purpose. This information is used both by the runtime
system to setup and interlink attributes and by frontend tools to give support during model design. As
an example, a component could calculate potential evapotranspiration (pET), taking wind speed,
temperature, humidity, radiation and elevation as input and calculating pET as output.
Components are stateless objects, meaning that all processing information has to be provided via
attributes at each invocation of the component’s run method. In the case that a spatial state attribute
(e.g. a water storage) should be modified by a component, the according value must be presented as an
input and provided as an output of the component. The storage of the value till the next invocation of
the component is done outside.
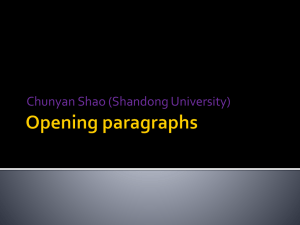
Although theoretically possible, temporal and spatial iteration is not meant to be done inside of
components. Instead, this is subject of the second type of model building blocks, called contexts. A
JAMS context is a special component that can nest other components and contexts, named children. A
context serves two main purposes: (i) it controls the execution of its children, and (ii) serves as an
application context for them. Depending on the purpose of a given context, it might invoke its children
multiple times over a number of iterations or only once if some predefined condition is satisfied
(Figure 2).
Figure 2: Context examples
Examples for iterator contexts are the spatial context or the temporal context, iterating over a set of
spatial model entities or time steps respectively and invoking their children for each of them (see
section 2.4). A typical application of both contexts is shown in Figure 3, with a spatial context nested
inside of a temporal context. Using this setup, conceptual models that simulate environmental
processes at discrete points in space-time can easily be represented.
For spatial contexts, different sets of spatial attributes (each of them representing one spatial model
entity) must be stored after each iteration step and restored prior to the next iteration step of the same
entity. This task is managed by state objects that are associated to contexts, each of them storing a set
of attributes and their values. Depending on whether a context must store its iteration states or not, it
can have multiple states (spatial context) or only one (temporal context).
Children iteration is done in a context’s run method which it inherits from the component class (Figure
4).
Figure 3: Nesting of temporal and spatial contexts
Although contexts are stateless like components, they can manage a set of special states. A state is
characterized by a dynamic set of attributes, reflecting its components’ inputs and outputs. As a
context might iterate over a series of children invocations, one state object might exist for each
iteration. The relation between components, contexts and states is shown in Figure 4.
, serving as a data proxy for their child are stateful onkecstore their state after Details of the data
stage are used to implement specific knowledge as process algorithms whereas the model structure
and the components’ execution control are defined by the context components. As a benefit from this
approach, an environmental process (e.g. potential evapotranspiration) can be implemented as a JAMS
component without any knowledge about its later execution context, e.g. the temporal resolution or the
type of spatial discretisation of the modelled area. The only precondition for the later application of a
component in conjunction with others is the proper declaration of its desired input data and provided
output data by means of metadata in the component's source code. Context components in JAMS
define the model structure that is needed to represent the necessary temporal and spatial iteration
loops. This can be accomplished by managing the repeated execution of other components while
varying their sets of input data. Each set of input data may then represent one point in time (temporal
context) or space (spatial context). A context component in JAMS can thus be seen as a scope that
defines an environment for the execution of other software components. Together with another context
(model context) that manages the execution of the real simulation, the above-mentioned environmental
models can easily be produced.
Figure 4: Components, contexts and states
As JAMS is a JAVA-based framework, components and contexts are implemented as JAVA classes.
For ease of use, newly implemented components can be inherited from existing base classes that
already provide the necessary interfaces. In order to offer meta-information about components or
contexts (e.g. for later use by the runtime system), JAVA annotations are used. They are
2.3 Dynamic behavior
2.3.1
Run stages
2.3.2
Data exchange
High level model design
Discrete time/space system
Timed event system
Non-linear
Non-autonomous
A JAMS simulation component is a software component which is characterized by a tuple (I, O, P)
where I is a set of input
In contrast to Discrete Event Systems, state transitions of JAMS simulation components are not
autonomously triggered by external events. Instead, state transitions and thus the calculation of new
output values are explicitly triggered
Stateful / stateless context
A context’s behavior defines a sequence of states which is traversed during the context’s run stage. A
state can be understood as a dynamic, user defined set of attributes. For each context state all of the
context’s child components are processed by executing their run method. As the child components
input and output slots can be linked to any enclosing context’s state attributes, a context state can be
seen as a data proxy that stores a component’s result beyond the components life span.
, each of them characterized by a distinct set of attribute values. These attributes can be modified
2.3.3
Data exchange
2.4 Core components
3 Support tools
3.1 Model design and deployment
3.2 Parameter optimization and analysis
3.2.1
Sensitivity analysis and calibration
The JAMS-Explorer is offering a powerful toolbox for sensitivity analysis, uncertainty estimation and model
identification and visualization based on the Monte Carlo Toolbox Version 5 (MCAT5) developed by Wagener
et al. (2007). Although MCAT was designed to meet requirements from the domain of hydrologic modeling, it is
suited for most mathematical models as well. The following section provides firstly an overview about data
requirements of the toolbox and the associated data-scheme. Secondly, all implemented methods are listed and a
selection of three tools is explained in more detail.
Most of the methods included in the toolbox require data from a prior Monte Carlo sampling. Monte Carlo
sampling relies on repeated simulation of a model with randomly generated or perturbed parameter or input-data.
To perform this task, the JAMS Framework includes some random sampler components. Section 4.2.2 gives
further information about random sampling. The result from this sampling is the compilation (ensemble) of all
the model responses consisting of model-parameters, one or more objectives and some spatial and time series
data. Here, objective is specified as any single valued function of the model response, but in almost all cases a
goodness-of-fit measure between simulated and observed data is supposed.
Because of the huge amount of data, processing of ensembles usually requires a lot of computing power and
even more memory capacity. The general concept of JAMS’ data analysis and processing is not suited for this
task. Therefore, the demand for a special data-scheme arises, which meets the following requirements:
-
Efficient data-storage with regard to memory consumption
Fast and simple creation of ensembles from raw data
Flexibility and extensibility in respect to data-types used in the data-scheme
Incorporation of metadata
The core of the resulting scheme consists of four classes i) DataSet, ii) Simulation, iii) DataCollection and
iv) Ensemble. The root of the scheme is the class DataSet. Therefore each class of the scheme has to be an
instance of DataSet. The class Simulation is responsible for storing and enumerating all DataSets associated with
a single model simulation. These DataSets are categorized by their name and class. Simulations also containing
some metadata and ensure basic data consistency, but for the sake of flexibility they are neither intended to know
much about their data nor offering methods for data manipulation. Here the class DataCollection comes into
play, which is a powerful container for Simulations. It provides essential operations to search and manipulate
DataSets and it is able to work with ensembles. Another feature of DataCollection is creation of Ensembles by
simply providing properties of the desired DataSets. Then all DataSets which meet the requirements are retrieved
from the collection of simulations and compiled into a new ensemble. Furthermore it is possible to merge
multiple DataCollections into a new one, even when there are different temporal extends or different DataSets.
The framework is able to handle such request and ensures some degree of data-consistency. Figure 5 shows the
structure of the scheme and some of the provided operations.
Figure 5 Data scheme in UML notation
Method
Application
Dotty Plot
A Posteriori Parameter Estimation
Identifiability Plot
DYNIA
Regional Sensitivity Analysis
Regional Sensitivity Analysis II
Class Plot
GLUE Variable Uncertainty
GLUE Output Uncertainty
Sensitivity Analysis, Model identification
Model identification
Model identification
Temporal sensitivity analysis of parameters
Sensitivity analysis
Sensitivity analysis
Comparison of behavioral and non-behavioral models
Uncertainty estimation of one-valued model outputs
Uncertainty estimation of time-series generated by a model
Uncertainty estimation of time-series generated by a model
based on Pareto estimation of multiple objectives
Evaluation of dependencies between different objectives
Visualization of the best parameter values with respect to
different objectives.
Visualization of the best simulation with respect to different
objectives
Pareto Output Uncertainty
Multi-Objective Plots
Normalized Parameter Range Plots
Best Prediction Plots
Table 1 MCAT methods available in JAMS–Explorer for Monte Carlo simulation analysis
The next section describes three common challenges that can be addressed with MCAT.
3.2.1.1 Model identification
A model is seen as identifiable iff, all the behavioral parameterizations of the model are located in a relative
small region of the whole parameter-space. Here we assume that a behavioral parameterization is defined as
parameter combination with plausible model response. With other words a model is identifiable if the behavior
of the real system is explained only by one kind of parameterization. If a model is identifiable it can directly be
used to draw conclusions about the hydrological system, e.g. assign a real physical meaning to some model
parameters or using the model for predictions or scenario modeling. It can also provide some deep insight into
the hydrological system.
A Dotty Plot is special scatter plot for assessing identifiability. Each point represents the value of an objective or
variable achieved with a specific parameter combination. To visualize the data the whole parameter space is
projected in one dimension by selecting one parameter and ignoring the others. The surface or upper boundary
line of the dots represents an estimate for the best model realization achievable for a given value of the selected
parameter. If there is a well-defined maximum then the selected parameter could be considered to be well
identified. Figure 6 shows the difference in the Dotty Plot between an identifiable parameter and a parameter
which is not identifiable.
It should be mentioned that many models are not or only partly identifiable, i.e. there are very different
parameterizations explaining the system well. This is known as Equifinality. The reason for this is that different
internal states of a model can result in similar model responses. It is not often feasible to validate internal model
states. Because it is impossible to say which model is correct, no model could be refused. As a logical
consequence an ensemble simulation should occur with all possible candidates. This functionality is also
supported by JAMS.
Figure 6 the left figure shows a parameter which could easily identified, where the parameter in the right picture is
not identifiable.
3.2.1.2 Sensitivity Analysis
A wide range of applications require identification of dominant parameters and processes of a hydrological
model by performing a sensitivity analysis.
The Regional Sensitivity Analysis Tool (Spear and Hornberger, 1980) is a method for estimating sensitivity of
model parameters, where sensitivity is defined as effect on the entire model performance. This method splits the
model simulations into ten groups according to their model performance. Thus the first group consists of the
most behavioral simulations (best ten percent) and the last group consists of the most non-behavioral simulations
(worst ten percent). For a given parameter, the accumulated distribution of the simulations across the valid range
of the parameter is calculated. This is carried out separately for each group. Afterwards each distribution is
visualized in a combined plot. A large discrepancy between those distributions indicates parameter-sensitivity
where similarity between the distributions indicates weak sensitivity. Figure 7 shows an example for a sensitive
and non-sensitive parameter.
Applications of sensitivity analysis range from questions of decision support to hydrological – system – analysis.
Another field of application is model calibration. It is known, that the effort to calibrate a model increases highly
with the number of parameters. Hence it is not recommended to calibrate all model-parameters at once, but to
split the calibration process into several subtasks by taking into account only a subset of the parameters. With
this approach it is advisable to begin with the most sensitive parameters, because they are also most important in
terms of calibration. A further improvement is to identify all identifiable parameters and to assign them to their
optimal value. For both tasks MCAT-5 provides the necessary tools.
3.2.1.3 Uncertainty Estimation
It is very unusual for hydrological models to exactly simulate reality. Uncertainties in the model structure, inputdata and parameterization leads to some uncertainties in the model response. It is very important to quantify
these uncertainties to derive robust predictions and conclusions from a simulation. Uncertainty estimation in
JAMS-Explorer is based on the Generalized Likelihood Uncertainty Estimation (GLUE) Framework, which uses
Monte – Carlo – Sampling and disturb input-data and parameterization with random errors. This gives an
estimate about the effect of real measurement errors and parameter-uncertainty. The basic idea behind GLUE is
that the likelihood of simulation is reality is directly related to the value of an objective. Therefore the objective
values are linear transformed into a probability distribution. In a preprocessing step non-behavioral simulations
are removed from the ensemble. Then the probability distribution is used to generate confidence intervals.Figure
8 shows the confidence intervals generated from parameter uncertainty with the GLUE Uncertainty Estimation
Tool.
Figure 7 Regional Sensitivity Analysis: The left plot shows a very sensitive parameter. The right plot shows an
insensitive parameter.
3.2.1.4 Calibration
In order to apply environmental models successfully, it is essential to determine model parameters very
carefully. A direct determination of parameter values is often not feasible since they lack a clear physical
meaning or field measurements are too expensive. Therefore, estimation of parameters is usually done by fitting
model response and observation in a trial and error process. Depending on the model's complexity and the
number of calibration parameters, this process can often be very time-consuming.
Model calibration with JAMS is supported by some powerful tools for optimization, which have been
implemented as JAMS context components. In various studies it was shown that the available algorithms are
able to find good and best parameterizations automatically. A noticeable advantage of JAMS is that due to the
flexibility of the JAMS framework and the generality of the applied methods, only a minimum of knowledge
about the model to be calibrated is needed. Only the relevant model parameters, the objective function(s) and
method dependent parameters must be made
available to the calibration component.
The process of calibration with JAMS consists
of several steps as shown in Error! Reference
source not found..
i) At first the optimization context is
initialized, e.g. optimization parameters are
Figure 8 0.95 Confidence intervals, calculated with GLUE read and variables are initialized. ii) The next
uncertainty estimation. Nine different parameters of the J2000 iteration is started with generation of a new
were disturbed during a Monte - Carlo - Analysis
parameter-set 𝑝, according to the rules of the
optimization method. iii) With this parameterset 𝑝 a model simulation is carried out. iv) The
objective is evaluated. The optimization
routines do not contain any functionality for
calculating objective values, but the JAMS – Framework is offering some components for model assessment e.g.
calculation of the Nash-Sutcliff-Efficiency (𝐸2 ), Coefficient of determination (𝑟 2 ) or absolute volume-error
(𝐴𝑉𝐸). To pass the calculated objective to the optimizer the functionality of JAMS – Attributes is used. It is
possible to optimize a single objective or multiple objectives at a time or simply performing a random sampling
for Monte-Carlo-Analysis. There are significant differences between those options, which are summarized in
Table 2. v) Steps ii-v is reiterated until a stopping criterion is fulfilled.
Formal
description
of the set of
solutions
Random Sampling
Single objective
optimization
Multi objective optimization
𝐿 = 𝑝̃ ⊆ 𝑃, |𝑝̃| = 𝑘
𝐿 = {𝑥: 𝑓(𝑥) = min 𝑓(𝑝)}
𝐿 = {𝑥: ∀𝑦∈𝑃 ∃𝑖=1..𝑚 𝑓𝑖 (𝑥) ≤ 𝑓𝑖 (𝑦)}
𝑝∈𝑃
Number of
objectives
Description
of set of
solutions
-
1
m
Any arbitrary collection of
parameter-sets
(some) global optimal point(s)
Pareto – Front
Example of
a solution
Solvers in
JAMS
RandomSamper
Latin Hyper Cube
Random Sampler
Random
Samplers
are
performing simply a fixed
number of model simulations.
To
perform
multiple
simulations with random
input error the InputErrorEstimation component could
be used, which adds an
absolute or relative error to
measurement data.
Example
Shuffeld Complex
Evolution
DIRECT
Simple Branch & Bound
Gutmann Method
Nelder Mead
DIRECT
is
a
typical
deterministic
optimization
routine
based
on
the
Branch&Bound
paradigm.
The class of Branch & Bound
algorithms has a long history
in mathematical optimization. The common strategy
of these methods is to
partition the problem into
smaller
sub
problems
(Branch), choose one of the
sub problems and recursively
apply this strategy. As soon as
all sub problems have been
solved, the solution of the
original problem is also
known. To speed up this
process sub problems are
rejected if they are unlikely to
contain a global solution
(Bound). A detailed explanation of this algorithm is
given by Horst et al. (2000).
MOCOM
NSGA-II
MOSCEM
NSGA-2 is famous multiobjective optimization routine,
which has been attracted a lot of
interest in the community of
mathematical
optimization.
NSGA-2 has shown
good
performance in many studies (Bui
et al. 2004, Coello & Sierra, 2003,
Zitzler et al., 2000). The algorithm
belongs to the class of genetic
algorithms, which is a subset of
evolutionary algorithms.
Solution
candidates
in
evolutionary algorithms are seen
as population of individuals. The
process of optimization develops
this population by creating new
generations
with
common
operations like selection, mutation
and crossover, which are inspired
by biological evolution.
Table 2 Properties of single and multiple objective optimizations
3.2.1.5 OPTAS
For the calibration of JAMS-models, various adjustments of the model structure are desirable, e.g. selection,
insertion and parameterization of the optimization component, removal of visual output components and
selection of in- and output data. The software wizard OPTAS provides support in this task and guides the user
step by step through the process of calibration and gives assistance whenever possible.
As a first step of the calibration setup procedure, the model is loaded and the list of available parameters is
presented to the user. Following, feasible value ranges of the selected parameters and one or more objective
functions (e.g. Nash-Sutcliffe efficiency) need to be selected from a list. Based on this information, suitable
optimization methods are proposed and parameterized with default values. For fine tuning, these
parameterizations can be adapted. A comprehensive description of all values helps to choose well-performing
parameters. Finally the software wizard automatically generates the calibration environment.
In order to maximize runtime performance of the model and accordingly of the calibration procedure, all
components that are not needed to ultimately compute the objective function can be removed. In order to identify
those components, a dependency analysis of the model is being applied based on the components’ input and
output data.
Based on the resulting dependency-graph the model structure can be further analyzed. A component which is not
connected with the objective function component does neither directly nor indirectly use any data generated by
that component. That means such a component has absolute no effect on the objective and is therefore
eliminated. Because every component provides information about their attributes this analysis is done fully
automatically. Usually, these are components for visualization and data-output. In addition, components can be
identified that have influence on the objective function, but are independent of the parameters in calibration, e.g.
data-input processes. Under specific circumstances, these processes can be executed only once before calibration
starts, thereby saving execution time. In order to make sure that each model starts with identical initial
conditions, a snapshot of the complete model is being taken. At each model execution in the course of the
optimization procedure, this snapshot is being restored in advance.
4 Applications
Simulation components and models available
5 Summary
JAMS is developed as open source software licensed under the GNU Lesser General Public License
and can be downloaded from http://jams.uni-jena.de. The package includes the JAMS core system, its
GUI extensions for model creation and execution, a library with frequently used components (e.g. for
creating plots and maps from simulation results), and the J2000 hydrological modelling components.
In order to test JAMS, the package also provides a preconfigured, ready-to-run J2000 model with test
data.
6 Bibliography
Argent, R., Perraud, J., Rahman, J., Grayson, R., & Podger, G. (2009). A new approach to water
quality modelling and environmental decision support systems. Environmental Modelling & Software,
24(7), 809-818.
Argent, R., Voinov, A., Maxwell, T., Cuddy, S., Rahman, J., Seaton, S., Vertessy, R., et al. (2006).
Comparing modelling frameworks – A workshop approach. Environmental Modelling & Software,
21(7), 895-910.
Branger, F., Braud, I., Debionne, S., Viallet, P., Dehotin, J., Henine, H., Nedelec, Y., et al. (2010).
Towards multi-scale integrated hydrological models using the LIQUID® framework. Overview of the
concepts and first application examples. Environmental Modelling & Software, 25(12), 1672-1681.
Bui, L.T. and Essam, D. and Abbass, H.A. and Green, D.(2004). Performance analysis of evolutionary
multi-objective optimization methods in noisy environments. Proceedings of the 8th Asia Pacific
symposium on intelligent and evolutionary systems 29-39
Coello, C. and Sierra, M.R.(2003). A coevolutionary multi-objective evolutionary algorithm. IEEE
Congress on Evolutionary Computation, 2003. CEC'03. 482-489
David, O., Markstrom, S. L., Rojas, K. W., Ahuja, L. R., & Schneider, I. W. (2002). The Object
Modeling System. In L. Ahuja, L. Ma, & T. A. Howell (Eds.), Agricultural System Models in Field
Research and Technology Transfer (pp. 317–31). Lewis Publishers.
Fink, M., Krause, P., Kralisch, S., Bende-Michl, U., & Flügel, W. (2007). Development and
application of the modelling system J2000-S for the EU-water framework directive. Advances in
Geosciences, 11, 123-130.
Fischer, C., Kralisch, S., Krause, P., Fink, M., & Flügel, W. (2009). Calibration of hydrological model
parameters with the JAMS framework. In R. Anderssen, R. Braddock, & L. Newham (Eds.),
Proceedings of the 18th World IMACS Congress and MODSIM09 International Congress on
Modelling and Simulation (pp. 866-872). Cairns, Australia.
Gregersen, J., Gijsbers, P., & Westen, S. (2007). OpenMI: Open modelling Interface. Journal of
Hydroinformatics, 3(9), 175–191.
Kralisch, S., Zander, F., & Krause, P. (2009). Coupling the RBIS Environmental Information System
and the JAMS Modelling Framework. In R. Anderssen, R. Braddock, & L. Newham (Eds.),
Proceedings of the 18th World IMACS Congress and MODSIM09 International Congress on
Modelling and Simulation (pp. 902-908). Cairns, Australia.
Kralisch, S., Krause, P., Fink, M., Fischer, C., & Flügel, W. (2007). Component based environmental
modelling using the JAMS framework. In D. Kulasiri & L. Oxley (Eds.), Proceedings of the MODSIM
2007 International Congress on Modelling and Simulation. Christchurch, New Zealand.
Krause, P., Bende-Michl, U., Fink, M., Helmschrot, J., Kralisch, S., & Künne, A. (2009). Parameter
sensitivity analysis of the JAMS/J2000-S model to improve water and nutrient transport process
simulation - a case study for the Duck catchment in Tasmania. In R. Anderssen, R. Braddock, & L.
Newham (Eds.), Proceedings of the 18th World IMACS Congress and MODSIM09 International
Congress on Modelling and Simulation (pp. 3179-3186). Cairns, Australia.
Krause, P., Kralisch, S., & Flügel, W. (Eds.). (2005). Model Integration and Development of Modular
Modelling Systems. Advances in Geosciences (Vol. 4). European Geosciences Union.
Krause, P. (2002). Quantifying the impact of land use changes on the water balance of large
catchments using the J2000 model. Physics and Chemistry of the Earth, 27(9-10), 663-673.
Rahman, J. (2004). Making frameworks more useable: using model introspection and metadata to
develop model processing tools. Environmental Modelling & Software, 19(3), 275-284.
Rahman, J. M., Seaton, S. P., Perraud, J. M., Hotham, H., Verrelli, D. I., & Coleman, J. R. (2003). It's
TIME for a new environmental modelling framework. In MODSIM 2003: International Congress on
Modelling and Simulation (pp. 1727-1732). Nedlands, WA, Australia: Univ Western Australia.
Spear, R.C., Hornberger, G.M. (1980). Eutrophication in Peel Inlet, 2, Identification of critical
uncertainties via Generalised Sensitivity Analysis. Water Research, 14, 43-49
Wagener, T., & Kollat, J. (2007). Numerical and visual evaluation of hydrological and environmental
models using the Monte Carlo analysis toolbox. Environmental Modelling & Software, 22(7), 10211033.
Dias, A.H.F. & De Vasconcelos, J.A.(2002). Multiobjective genetic algorithms applied to solve
optimization problems. IEEE Transactions on Magnetics, 38(2), 1133-1136.
CCA
HLA
OpenMI
MMS
OMS
TIME
LIQUID
Jagers, H.R.A. (Bert), 2010. Linking Data, Models and Tools: An Overview, in: Swayne, D.A., Yang,
W., Voinov, A.A., Rizzoli, A., Filatova, T. (Eds.), Proceedings of the iEMSs Firth Biennial Meeting:
International Congress on Environmental Modelling and Software (iEMSs 2010). International
Environmental Modelling and Software Society, Ottawa, Canada.