Trunk angles - Springer Static Content Server
advertisement

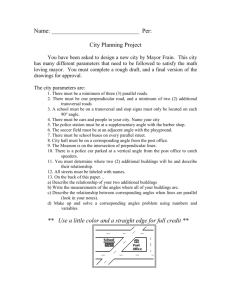
Appendix The definition of the referential frames follows that of the ISB. The angles were computed as projection angles. Trunk angles: 1. Definition of the referential frame X t : antero-posterior axis from back to front Yt : longitudinal axis positive when directed towards the head Zt : medio-lateral axis from the left to the right 2. Definition of the position of reference Subject stands still on his feet 3. Angles computation trunk flexion/extension angle between the vectors Ytref and Yt projected in the sagittal plane ( Xtref , Ytref ) medio/lateral inclination - angle between the vectors Ytref and Yt projected in the frontal plane ( Ytref , Ztref ) internal/external rotation - angle between the vectors Xtref and Zt projected in the transverse plane ( Xtref , Ztref ) Figure 1: illustration of the referential frames Upperarm angles: 1. Definition of the referential frame Xu : perpendicular to the two other vectors directed forwards Y u : longitudinal axis directed from the elbow joint centre to the shoulder joint centre Z u : elbow flexion axis directed medio-laterally 2. Angles computation shoulder flexion/extension angle between the vectors Yt and Y u projected in the sagittal plane ( X t , Yt ) abduction/adduction angle between the vectors Yt and Y u projected in the frontal plane ( Yt , Zt ) humeral internal/external rotation -angle between the vectors (Yu Xt ) Yu and Xu Forearm angles: 1. Definition of the referential frame Xf : perpendicular to the two other vectors directed forwards Yf : longitudinal axis directed from the elbow joint centre to the shoulder joint centre Zf : elbow flexion axis directed medio-laterally 2. Angles computation flexion/extension angle between the vectors Y u and Yf pronation/supination angle between the vectors Xf and Z h projected in the plane ( Xf , Zf ) Hand angles: 1. Definition of axes needed Y h : longitudinal axis directed from distal to proximal Zw : wrist axis directed from the ulna to the radius 2. Angles computation flexion/extension angle between the vectors Yf and Y h projected in the plane perpendicular to Zw radial/ulnar deviation angle between the vectors Yf and Y h projected in the plane ( Yf , Zw )