Analysis of a Toggle Mechanism:
Sensitivity to Link Sizes and Compliance Material
by
Joseph P. Hughes
A Project Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the degree of
MASTER OF ENGINEERING
Major Subject: MECHANICAL ENGINEERING
Approved:
_________________________________________
Professor Ernesto Gutierrez-Miravete, Project Adviser
Rensselaer Polytechnic Institute
Hartford, Connecticut
August 2012
(For Graduation December 2012)
© Copyright 2012
by
Joseph P. Hughes
All Rights Reserved
ii
CONTENTS
LIST OF TABLES ............................................................................................................ iv
LIST OF FIGURES ........................................................................................................... v
LIST OF SYMBOLS ........................................................................................................ vi
ABSTRACT .................................................................................................................... vii
1. Introduction.................................................................................................................. 1
2. Theory/Methodology ................................................................................................... 4
2.1
2.2
Linkage Stress Evaluation .................................Error! Bookmark not defined.
2.1.1
Effect of Link Length on Stress within the Linkage .............................. 8
2.1.2
Effect of Compliant Material Choice on Stress within the Linkage ...... 8
Methodology Used during the Finite Element Analysis (FEA) ......................... 9
2.2.1
Model Used during Analysis .................Error! Bookmark not defined.
2.2.2
Element Choice for the Evaluations ..................................................... 12
3. Results and Discussion .............................................................................................. 14
3.1
Baseline Evaluation of the Toggle Mechanism ................................................ 14
3.2
Toggle Mechanism Sensitivity to Linkage Length ........................................... 16
3.3
Toggle Mechanism Sensitivity to the Compliant Material Choice .................. 18
4. Conclusion ................................................................................................................. 20
References........................................................................................................................ 21
Appendix.......................................................................................................................... 22
iii
LIST OF TABLES
iv
LIST OF FIGURES
Figure 1: Toggle Mechanism [Reference (1)] .................................................................. 1
Figure 2: Finite Element Analysis Components ............................................................. 12
Figure 3: Boundary Conditions for Linkage ................................................................... 12
Figure 4: Linkage Modeled and Meshed in ABAQUS .................................................. 14
Figure 5: Stress of Element 618 during the travel of the linkage (baseline) .................. 15
Figure 6: Location of Element 618 ................................................................................. 15
Figure 7 : Stress in Linkage at the Toggle Location of the Linkage (toggle location was
enlarged to show more detail).................................................................................. 16
Figure 8: Stress levels within Element 618 throughout the travel of the linkage (with
0.005 in shorter links) .............................................................................................. 17
Figure 9: Stress distribution within linkage as it passes through toggle......................... 18
Figure 10: Stress within Element 618 throughout the travel of the linkage (with BeCu
compliant material) .................................................................................................. 19
Figure 11: Stress within linkage as it passes through toggle with BeCu stop ................ 19
v
LIST OF SYMBOLS
𝐿 – Length of the links
𝐻 – Height of the links
𝑡 – Thickness of the links
𝐿𝑒𝑛𝑑𝑝𝑜𝑖𝑛𝑡 – Distance between the end points of the links
𝛿𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑖𝑜𝑛 – Compression of each link
𝜀𝑙𝑖𝑛𝑘 – Strain within each link
Ε – Modulus of Elasticity
𝐸𝑙𝑖𝑛𝑘 – Modulus of Elasticity of link
𝜎 – Engineering stress
𝜎𝑙𝑖𝑛𝑘 – Engineering stress of link
𝜎𝑦𝑖𝑒𝑙𝑑 – Allowable yield stress of the link
𝜖 – Engineering strain
𝜀𝑙𝑖𝑛𝑘 – Engineering strain of link
𝐹 – Force
𝐹𝑙𝑖𝑛𝑘 – Force within the link
𝐴 – Area
𝐴𝑃𝑖𝑛 – Area pin
𝑑𝑃𝑖𝑛 – Diameter of pin
𝐿𝑛𝑒𝑤 – New length of the link
𝜏𝑝𝑖𝑛 – Shear stress within the pin
𝜏𝑎𝑙𝑙𝑜𝑤𝑎𝑏𝑙𝑒 – Allowable shear stress within the pin
vi
ABSTRACT
Toggle mechanisms are commonly used within linkages in order to lock their position.
These mechanisms do this by passing through a “toggle” point where any force into the
linkage would cause the linkage to maintain its position. While passing through the
“toggle” point, there is a great deal of stress applied to the links. The purpose of this
investigation was to evaluate the impact that a change in length of the links or change in
the choice of material for the compliant element within the linkage has on the stress
within the linkage. It was found that a small decrease in the length of the links resulted
in a large decrease in the stress within the linkage. Additionally, it was found that the
addition of a compliant material to the linkage also resulted in a reduction of stress
within the linkage. However, the compliant material did not reduce the stresses as much
as the reduction in length of the linkage. The sensitivity of the stress within the linkage
to small variations within the length of the links is the reason that many toggle
mechanisms, such as those used in pliers come with an adjustable component that can
account for any variations that may occur during manufacturing.
vii
1. Introduction
Toggle mechanisms are commonly used within linkages and serve many purposes.
These purposes include: transferring rotational motion into linear motion, magnify input
loads (due to the mechanical advantage that a toggle mechanism affords), and locking
the position of a linkage.
In all of these applications, the links within a toggle
mechanism experience a great deal of stress, especially when used to lock the position of
a linkage. As the toggle mechanism passes through the toggle position each of the links
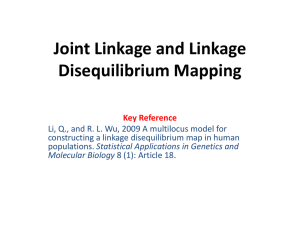
are compressed creating a large amount of stress within the link. Figure 1 provides an
illustration of the toggle mechanism used throughout this evaluation.
Figure 1: Toggle Mechanism
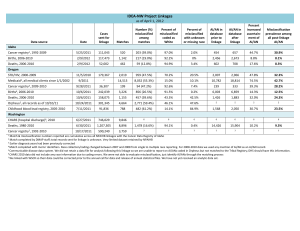
Figure 2 shows the components that comprise the toggle mechanism. This mechanism
consists of two links, a slide, a stop, and three connecting pins. The two links are able to
rotate about their connecting pins and the slide allows translational movement (left to
right as shown in Figure 2) until it contacts the stop which resists any additional
translational movement.
Figure 2: Components within Linkage
1
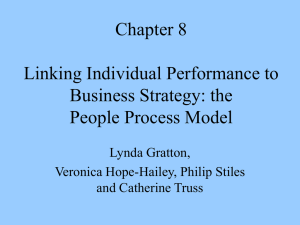
Figure 3: Linkage movement from given displacement
During this evaluation, the pin is pushed vertically down forcing the other two links to
rotate about their endpoints and the slide to translate towards the right (as pictured in
Figure 3). When the pin is pushed a sufficient distance, such that the adjacent links are
aligned, the mechanism is said to be at its “toggle” point (see Figure 4). At this position
the components within the linkage have experienced their greatest compression and
therefore their greatest amount of load. As the mechanism passes this point, it is said to
travel “over-toggle” (see Figure 5), and the stress within the linkage begins to dissipate.
Often this “over-toggle” position is used, in conjunction with a hard stop for the links, to
lock a linkage in place as any forces from the outside pins would force the force the
middle pin further down and into the potential hard stop. Additionally, because of the
large forces experienced within a toggle mechanism, there is a component that is
compliant and takes some of the stress created by the interference between the links as
they pass into the over-toggle position.
Additionally, the compliant material also
provides a constant force back into the linkage helping lock it into the over-toggle
position.
Figure 4: Toggle mechanism at "toggle" point
2
Figure 5: Toggle mechanism in "over-toggle" position
This evaluation examines the stress within the linkage as it passes through the toggle
position specifically the impact that the linkage lengths (links 1 and 2) and material
choice for the compliant element within the linkage have on the stress levels within the
linkage. This analysis consists of the three steps: 1) establishing a baseline linkage and
evaluate the stress in the linkage as it passes through the toggle point, 2) evaluating the
impact of the length of the links, and 3) evaluating the impact of the spring rate of the
compliant element of the system. The first evaluation will establish a baseline stress
level in order to evaluate the two changes to the linkage (length of links and compliant
material choice). The next two evaluations are performed in isolation to each other. In
other words, the baseline model is used and only the length of the links is altered and
conversely when the compliant material choice is evaluated it too is the only change
from the baseline model. This way the two variables can be evaluated independently
and compared back to the same baseline to compare the severity of the impact each
component has on the stress values within the linkage. The linkage length was chosen as
a variable to evaluate as machining tolerances are used on components during
manufacturing. This evaluation will determine the impact of those machining tolerances
on the stress levels within the linkage.
When designing a toggle mechanism, the
designer may choose to utilize a compliant material to reduce the force within the links
as it passes the toggle point or, in the case of table top clamps, to hold a component for
machining without damaging the component. It is important to know how much of an
impact that this choice of compliant material has on the stress levels within the linkage.
3
2. Theory/Methodology
2.1 Kinematic Relationship within Linkage
A toggle mechanism is a type of linkage, a connection of links able to transmit motion
and forces. As such, its motion is governed by kinematic and linkage theory. The toggle
mechanism used throughout this evaluation is limited to planar motion, meaning all
motion within the linkage (rotational or translational) occur within the same plane. A
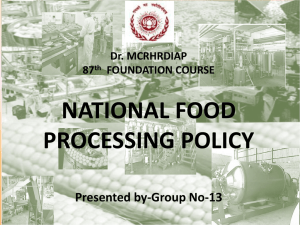
link in planar motion has three degrees of freedom (see Figure 6), however, when it is
added to other links within a linkage, some of these degrees of freedom are constrained.
Figure 7 illustrates the allowable degrees of freedom for each of the joints within the
linkage. This linkage consists of three links in total (four including the ground), three
revolute and one prismatic joint. A revolute linkage is one that is allowed only the
angular degree of freedom. A prismatic link is one that is allowed to slide along one
degree of freedom. Using this information it is possible to theoretically determine the
degrees of freedom that the linkage has using the Gruebler and Kutzbach equation [].
This equation evaluates the mobility of the linkage based on the number of links
(including the ground link) and the number of joints allowing one degree of freedom and
the number of joints allowing two degrees of freedom. All of the joints within this
linkage allow only one degree of freedom.
Figure 6: Degrees of freedom of a planar link
4
Figure 7: Degrees of freedom within the linkage
Gruebler and Kutzbach Equation:
m = mobility of the linkage
n = number of links within the linkage
J1 = one degree of freedom joints
J2 – two degree of freedom joints
m 3(n 1) 2 J 1 J 2
m 3(4 1) 2(4) 0
m 1
Therefore, this linkage has only one degree of freedom. Upon review of the linkage, this
result makes sense as the linkage is driven off of the motion of one of the links. It is
important to understand the travel of the linkage and kinematic relationship between
each link within the linkage to understand how the linkage moves and there by be able to
calculate how the forces will be transmitted through the linkage.
The kinematic
relationship between the position of the slide and the angular position of link 1 is shown
in Figure 8 and calculated by the following equation; where “L” is the length of each
link
and
“α”
is
the
Llink1 Llink2 cos( ) Lslide .
angular
position
of
the
link
(see
Figure
8):
This equation allows the designer to evaluate a correct
placement of the stop in the linkage. When the linkage is at its toggle point α = 0 and
therefore the distance to the end of the slide is the sum of the lengths of each component.
Any difference in this sum of the component lengths and the distance between the
leftmost pin and the left face of the stop would be accounted for in deflection of the
links. Knowing this information, one is able to calculate the force within the linkage and
stress within the linkage using basic principles of strength of materials. Therefore,
knowing the allowable stress within the components in the linkage, the stop can be
5
placed such that the forces within the linkage from contact with the stop will not exceed
the limits of the material. Figure 8 provides a representation of the linkage that will be
used throughout this section to discuss the methodology behind the calculation. Link 1
is represented by the black line, link 2 by the red line, the slide by the green line, and the
stop by the black block.
Figure 8: Linkage representation
2.2 Evaluation of the Linkage
The theory behind the analysis of the toggle mechanism is based off of basic principles
of strength of materials. As stated before, this evaluation is broken into three steps: 1)
establishing a baseline linkage and evaluate the stress in the linkage as it passes through
the toggle point, 2) evaluating the impact of the length of the links, and 3) evaluating the
impact of the spring rate of the compliant element of the system. The theory behind
each of the steps of the analysis is the same. However, the impact that each of the
changes (link length and compliant element material choice) will be discussed as it
relates to the theory behind the analysis in sections 2.2.1 and 2.2.2.
The linkage
representation provided in Figure 8 will be used throughout this discussion. For this
discussion each of the links will be modeled as a beam element with the general stiffness
of k =
AE
and all deflection in the linkage is due to compressive loading (any bending
L
will be ignored). Ignoring bending for this discussion is a valid assumption as the links
are not expected to experience significant bending during the linkage movement. The
mechanism is close to its toggle point (with the link all aligned) when the majority of the
loading occurs and therefore the driving stress will be compression.
6
Additionally,
during this discussion the pins are not individually accounted for, assuming instead that
they act within the stiffness of each of the links. The forces between the links will then
be used to evaluate the stress within the pins.
Each of the links (and stop) within this mechanism can be treated as a spring where:
𝐹𝑖 = −𝑘𝑖 𝜕𝑖
𝑘𝑖 =
𝐴𝑖 𝐸𝑖
𝐿𝑖
𝐴𝑖 = 𝑤𝑖 × ℎ𝑖
Where i is 1 for link 1, 2 for link 2, 3 for the slide, and 4 for the stop and 𝑤𝑖 is the width
of each link and ℎ𝑖 is the height of each link. The total length of the linkages (Ltotal) less
the length between the left pin of link 1 and the right side of the stop (Lavailable) is the
total deflection within the linkage (δlinkage).
4
𝐿𝑡𝑜𝑡𝑎𝑙 = ∑ 𝐿𝑖
𝑖=1
4
𝜕𝑙𝑖𝑛𝑘𝑎𝑔𝑒 = 𝐿𝑎𝑣𝑎𝑖𝑙𝑎𝑏𝑙𝑒 − 𝐿𝑡𝑜𝑡𝑎𝑙 = ∑ 𝜕𝑖
𝑖=1
As shown in the force diagram, provided in FIGRUE, all forces within the linkage are
equal. This means that the 𝑘𝜕 for each link will also be equal. As each link is made
from the same material and therefore has the same E, the E can be dropped from each
equation resulting in:
𝐴1
𝐴2
𝐴3
𝐴4
𝜕1 =
𝜕2 =
𝜕3 =
𝜕
𝐿1
𝐿2
𝐿3
𝐿4 4
Solving each equation for 𝜕𝑖 in terms of 𝜕1 results in:
4
𝐿𝑎𝑣𝑎𝑖𝑙𝑎𝑏𝑙𝑒 − 𝐿𝑡𝑜𝑡𝑎𝑙
𝐴1
𝐿𝑖
= − (𝜕1 + 𝜕1 × ∑ )
𝐿1
𝐴𝑖
𝑖=1
Once 𝜕1 is calculated, one can readily find 𝐹1 which, as previously discussed, is equal to
𝐹𝑖 . The deflection of each of the links is then easily calculated with the force in each
link and the equations provided herein. The stress within each of the links is then
7
calculated using the following equation and compared to the yield strength of the
material (𝜎𝑦𝑖𝑒𝑙𝑑 ).
σ=
𝐹𝑖
𝐴𝑖
The force from the links is transferred into pure double shear loading on the pins (as
assumed due to tight connection of links), therefore:
𝜋 × 𝑑𝑃𝑖𝑛
4
𝐹𝑖
=
2 × 𝐴𝑃𝑖𝑛
𝐴𝑃𝑖𝑛 =
𝜏𝑝𝑖𝑛
Additionally, in accordance with the maximum distortion energy theorem, the allowable
stress for the pin in a pure shear loading case is not the full yield strength of the material
but:
𝜏𝑎𝑙𝑙𝑜𝑤𝑎𝑏𝑙𝑒 = 0.577 × 𝜎𝑦𝑖𝑒𝑙𝑑
2.2.1
Effect of Link Length on Stress within the Linkage
The increase in the length of link 1 and link 2 within the linkage will decrease the
stiffness of each of these links, which for the same deflection, would lower the force in
the link.
However, the increase in length of the link would increase the overall
deflection required in the linkage. The increase in deflection will have a larger impact
on the stresses within the linkage than the reduction in stiffness and therefore it is
expected that the forces and stresses within the linkage will increase with the increase in
linkage length.
INSERT LINKAGE PICTURE SHOWING ADDITIONAL DEFLECTION
2.2.2
Effect of Compliant Material Choice on Stress within the Linkage
The addition of a compliant material will change the Elastic Modulus of the stop (link 4
in the evaluation). Therefore, 𝐸𝑖 cannot be readily canceled during the calculation. As a
result the equations will now look like:
𝐸1 𝐴1
𝐸2 𝐴2
𝐸3 𝐴3
𝐸4 𝐴4
𝜕1 =
𝜕2 =
𝜕3 =
𝜕
𝐿1
𝐿2
𝐿3
𝐿4 4
Solving each equation for 𝜕𝑖 in terms of 𝜕1 results in:
8
4
𝐿𝑎𝑣𝑎𝑖𝑙𝑎𝑏𝑙𝑒 − 𝐿𝑡𝑜𝑡𝑎𝑙
𝐸1 𝐴1
𝐸𝑖 𝐿𝑖
= − (𝜕1 +
𝜕1 × ∑
)
𝐿1
𝐴𝑖
𝑖=1
This adds an amount of difficulty to the analysis, especially if a rubber like material is
utilized. Rubber material tends to be non-linear in nature, depending on the shape of the
component, more specifically its shape factor, and the amount of compression of the
material. Therefore, non-linear material does not lend itself to a single E value (or
stiffness, k value). The shape factor compares the bulge area (or free area) of rubber
components to the loaded area. Simply speaking the more bulge area that is allotted for
a given load area, the “softer” or more compliant the material will be. The reduction in
stiffness of this member means that it will be taking more deflection than the links will.
This will overall reduce the amount of load carried through the links.
INSERT PICTURE THAT SHOWS MORE DEFLECTION ON STOP
2.3 Methodology Used during the Finite Element Analysis (FEA)
The following provides a discussion of the methodology used throughout the analysis of
the toggle mechanism. First a brief discussion on the geometry of the components
within the linkage is provided, along with a discussion on the methodologies used to
apply boundary conditions and ensure proper behavior between links during travel.
Then a discussion is provided on how the analysis was performed, what element type
was used, and what variables within the analysis were investigated.
2.3.1
Geometry of Components
A single linkage model is used for both sensitivity analyses (linkage length and
compliant material choice). The model was built within the ABAQUS program using
their sketching functions as the geometry of the linkage was simple. As shown in Figure
2, the linkage is made of up two links, a slide, a stop, and connecting pins. FIGURES
provide a detailed sketch of each of the links within the toggle mechanism. It should be
noted that the pins were not explicitly modeled for the analysis. Instead a built in hinge
connector function within ABAQUS was used for the pins. This is discussed further in
Section 2.3.3.
9
2.3.2
Meshing Techniques
2.3.3
Assembly of Mechanism
2.3.4
Loading
The pins were not explicitly modeled for the analysis, however, a built in connector
function of ABAQUS, called a hinge connection, was used to simulate this component.
This function allows the links to rotate as they would with a pin without having to model
the contact between the pin and the links. This step saves computational time and helps
the model to more easily converge. This hinge connection can also be setup to provide
the force on the hinge such that secondary analysis can be performed on the pin to
ensure its adequacy.
As shown in FIGURE, link 1 was modeled so that it was able to rotate about its end
without allowing any translational movement. The slide was modeled to allow only
translational movement (right to left as depicted in FIGURE) while restricting any
vertical, translational into the page, or rotational motion.
The back of the stop is
completely fixed, not allowing any translational or rotational movement.
Figure 10 provides the boundary conditions used throughout the analysis. Pins connect
the two links and the slide. Link 1 is only allowed to rotate about the pin on the left.
The slide is allowed to translate right and left (as shown in Figure 10) but not allowed to
move up and down or to twist in any direction. The stop is completely fixed and is set a
certain distance from the slide in order to impart the force in the linkage as it passes
through the “over-toggle” position. The purpose of this analysis was to investigate the
stress within the links of the linkage due to the changes to the linkage (length of the links
and compliant material choice). In order to save computational time, the pin was not
modeled for the left side of link 1 (as shown in Figure 10) but an end constraint was used
to simulate the pin.
10
2.3.4.1 Linkage Length Sensitivity Study
The geometry was created, meshed, and analyzed within the ABAQUS Standard
(implicit) solver as a static problem.
For the sensitivity study on the stress within each link due to the increased length of the
links, all components, including the stop, were assumed to be made from the same
material. During the analysis, the lengths of links 1 and 2, shown in Figure 9, were
altered to evaluate the impact.
The length changes used within the study were
machining tolerances typically used during the design of machinery components (+/0.005”). This change in length can be expected on a machined component. The analysis
would determine the nominal stress in the linkage due to the expected interference
between the links as they pass into the “over-toggle” position. This baseline of the
nominal condition is then compared to the stress values within the links when each is
lengthened (or shortened) by 0.005”.
2.3.4.2 Compliant Material Sensitivity Study
For the sensitivity study to determine the impact of a compliant material within the
linkage on the stress within the links, each analysis was completed with links of the
same length. The FEA was run with different materials used for the stop component.
The baseline for this study is the same as the baseline used in section 2.2.1.1. The stop
for the baseline was made from a steel material.
From there, Beryllium Copper,
urethane, and natural rubber were all evaluated as potential materials used for stops
within the toggle mechanism. Material models were developed for urethane and natural
rubber so that they could be modeled within the FEA with a degree of accuracy. These
non-metallic materials do not behave linearly and are dependent on factors like the bulge
area of the stop (shape factor) and the amount of compression of the material.
Therefore, the behavior of each of these materials (urethane and natural rubber) were
estimated by a model created from data points of known performance of each material
based upon the shape of the stop and the amount of compression expected.
11
Link
Link
Slide
Stop
Figure 9: Finite Element Analysis Components
Link
Link
Slide
Stop
Figure 10: Boundary Conditions for Linkage
2.3.5
Element Choice for the Evaluations
During the evaluations, the model used for the evaluation of the linkage was comprised
of linear brick elements with incompatible modes. These elements, according to the
12
ABAQUS1 instruction manuals, are good general-purpose elements, which for linear
elements, are particularly adept at evaluating bending. Additionally, because they are
linear elements they are lower cost elements computationally, compared with the higher
order elements.
1
ABAQUS Instructional Manual Section 3.2
13
3. Results and Discussion
The following section of this report discusses the results of the analysis and provides a
discussion of the impact of linkage length and complaint material on a toggle
mechanism.
Figure 11: Linkage Modeled and Meshed in ABAQUS
3.1 Baseline Evaluation of the Toggle Mechanism
The baseline evaluation model used the same material (steel) for each component of the
linkage. The two links (link 1 and link 2) were of their nominal lengths (2.255 in.).
Figure 12 provides the von Mises stress calculated at element 618 (shown in Figure 13)
throughout the travel of the linkage. At the toggle point of the travel in the linkage
(shown in Figure 14) the maximum stress within the links (located at the pin) is 100 ksi.
This value is in excess of the yield strength of the steel material used within the linkage
which has a typical yield strength of approximately 50 ksi. This was used for the
remainder of this analysis and will be re-evaluated prior to final submittal of the report.
14
Figure 12: Stress of Element 618 during the travel of the linkage (baseline)
Element 618
Slide
Link 1 to Link 2
Connector Pin
Figure 13: Location of Element 618
15
Stop
Figure 14 : Stress in Linkage at the Toggle Location of the Linkage (toggle location was enlarged to
show more detail)
These results from the baseline evaluation will provide the basis for the evaluation of the
impact of the increase in linkage length and choice of compliant material on the stress
levels within the linkage. As discussed above, the stress values obtained from the initial
evaluations far exceed the yield strengths of the material used for the evaluation. The
analysis for this portion of the evaluation is currently being re-run. However, the results
from the following evaluations should still be able to indicate the trends in change of
stress within the linkage, though their exact stress levels will not be the same as the final
submittal.
3.2 Toggle Mechanism Sensitivity to Linkage Length
To evaluate the impact that the change in length of the two links within the linkage has
on the stress levels within the linkage, the length of each link was decreased by 0.005 in
(each link was then 2.25 in in length) and the evaluation was repeated. The value of
0.005 in was utilized, as it is a common machining tolerance that is used for links of this
size. The peak stress levels noted within the linkage were shown to be 23 ksi. This is a
reduction of approximately 80% in peak stress from a reduction of 0.005 in (0.010 in in
total) from the links. The small reduction in length of the links significantly reduces the
amount that each of the links is required to compress to pass through the toggle position
of the linkage. Additional studies are planned to try smaller increments in reduction of
16
length of the links within the linkage to determine the effect of a smaller variation. A
table of results from the several analyses run will then be provided herein to summarize
the impact of linkage length to stress levels within the linkage.
Figure 15: Stress levels within Element 618 throughout the travel of the linkage (with 0.005 in
shorter links)
17
Figure 16: Stress distribution within linkage as it passes through toggle
3.3 Toggle Mechanism Sensitivity to the Compliant Material Choice
To evaluate the impact that the compliant material choice has on the stress levels within
the linkage, the material of the stop was varied and the evaluation was repeated. The
initial material choice for the stop within the linkage was steel for the baseline condition
as documented herein. The first variation from that material choice was the use of
Beryllium Copper (BeCu). BeCu was chosen because it is often used as a spring
material due to its high tensile strength and good ductility. When this material is added
into the system with the same original link lengths (2.255 in), the peak stress levels
noted within the linkage were shown to be 93 ksi. This is a reduction of approximately
7% in peak stress. This is a small reduction compared to the drop in stress resulting
from the reduction in length of the links within the linkage. This material was one of the
stiffer materials to be tested. Neoprene and natural rubber material models are still being
developed and are likely to have a greater impact on the stresses within the system.
18
Figure 17: Stress within Element 618 throughout the travel of the linkage (with BeCu compliant
material)
Figure 18: Stress within linkage as it passes through toggle with BeCu stop
19
4. Conclusion
General conclusions can be made from the data that has been gathered from the
evaluation thus far, with the understanding that the magnitude of the impact each of the
changes has may be different when the evaluation has been completed.
Both the
reduction of length of the links and the change in material properties for the stop reduces
the stresses within the linkage. Each of these changes reduces the amount that the links
within the linkage are required to compress in order to pass the toggle position. The
change in linkage length had a larger impact on the reduction of the stress levels as it
was able to have reduce the compression of the links. The change in compliant material
reduces the stress within the linkage as it requires less force to pass through the toggle
position as it is able to compress the stop more as the compliant material is less stiff.
However, this additional compression of the stop is less than the reduction in the length
of the links.
20
References
(1) DE-STA-CO, Manual Clamps; Monday July 2, 2012,
http://www.mjvail.com/destaco/intropage3.html
(2) Avallone, Eugene; Baumelster, Theodore; Sadegh, Al; Mark’s Standard Handbook
for Mechanical Engineers; McGraw Hill; dated November 2006
(3) Oberg; McCauley, Christopher; Ryffel, Henry; Holbrook Horton; Jones, Franklin;
Machinery’s Handbook 28th Edition, Industrial Press, Inc.; dated February 2008
(4) Tso, Rei-Lum; The Kinematic Synthesis of Toggle Clamps, American Society of
Mechanical Engineers; Volume 120, August 1998; Pages 648-655
21
Appendix
Appendices will be added after the finite element analysis is completed.
22
i