data_release_notes
advertisement

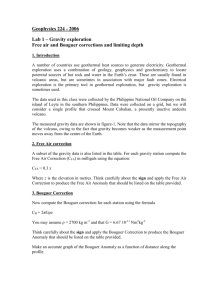
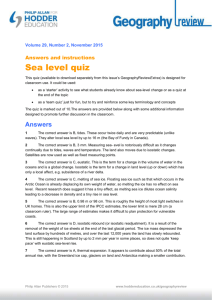
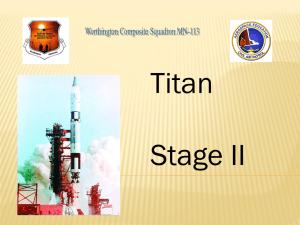
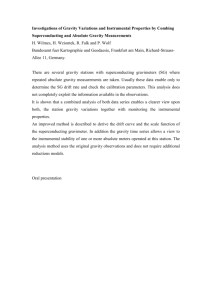
Introduction This document contains full details of the magnetic and gravity data processing for the grids distributed with this manuscript. The aim of the processing exercise was to gain, for the purposes of qualitative interpretation, representative grids that are free from visual artefacts related to acquisition and to remove some of the better known external influences (temporal magnetic field changes, topography effects in gravity etc) using standard methods. The intention is not that these grids are relied on for detailed quantitative work. Line data for these ICECAP products are available at full resolution through the ICEBRIDGE data portal at NSIDC (http://nsidc.org/icebridge/portal/). Instruments All instruments were flown aboard the DC-3T aircraft civil registered as C-GJKB, owned and operated by Kenn Borek Air, Ltd. The ice penetrating radar used was the 60 MHz HiCARS 1 instrument described in Young et al. [2011] and references therein. Airborne magnetic data came from a Geometrics G-823A cesium vapor magnetometer housed in an aircraft tailboom. Gravitational acceleration data were obtained by a Bell Aerospace BGM-3 two-axis stabilized scalar gravimeter on loan from the National Geospatial-Intelligence Agency. Aircraft kinematic accelerations for use in processing the gravimeter data were derived from GPS Precise Point Positioning solutions to carrier phase observations recorded by Topcon GB-1000 dual frequency receivers with antennas over the aircraftcentre of gravity and on each wing. The gravity data were processed to produce free air gravity disturbance values, with automatic removal of bad segments if horizontal or vertical kinematic accelerations exceeded allowable thresholds. Magnetic Data Processing Magnetic data were processed using standard methods, in a multi-stage process involving corrections for the time-varying field (diurnal), the international geomagnetic reference field (IGRF), levelling and gridding [Nabighian et al., 2005; Telford et al., 1990]. The Aurora Subglacial Basin and Terre-Adelie survey areas were treated separately for later grid merging. Smaller 2011-2012 datasets were also treated separately for later grid merging. Diurnal corrections for the main Aurora Subglacial Basin survey (2009/2010 data) were applied using data from permanent observatories at Casey Station, Dumont d’Urville Station and Concordia Station (Dome C). These approximately bound the extent of the survey to the north, east and south respectively (Figure 1). At any one time, the readings at the three stations differ considerably, and so our approach was to linearly weight the importance of each for the reduction of data according to the relative Euclidean distance of the data point from each observatory. Thus, measurements in the main Aurora Subglacial Basin region are reliant on Casey, whilst towards Dome C and Terre Adelie, the Dome C and Dumont d’Urville Stations have more influence. To the west we approach a neutral state, as all three stations become distant. Only Casey Station had a continuous record preserved throughout the data collection period and in the event of station dropouts, the remaining stations were used. Red-spots/lines in the image indicate areas where neither Dome C nor Dumont d’Urville were operating, and so Casey Station was the only available reference. Diurnal data for the Terre Adelie coast segment (unshaded lines in Figure 1) utilised only the diurnal correction from Dumont d’Urville station. 20112013 data, focused around the coast proximal to Casey Station, and Casey Station data were used. The IGRF model describes the very-large scale, and long-timescale variations in the Earth’s magnetic field (18). Over an area this size, the IGRF is very significant. For each data point, the IGRF was calculated for the relevant time and 3D location using the 2005 model. This was then subtracted from the diurnally corrected data. The diurnal and IGRF corrections do not account for many of the differences that can occur in measurements over such a prolonged, 4 year data collection program. Figure 1. Ternary image showing the relative influence of magnetic data from observatories at Casey, Dome C (Concordia) and Dumont d’Urville Stations in correcting for temporal fluctuations in magnetic field intensity. Only the “ASB” survey was corrected using this approach. Cross-line differences may relate to equipment and configuration changes, flying height differences, and imperfect removal of the time-varying field [Minty, 1991]. For the purposes of generating an interpretable 2D representation of geology, it is necessary to generate a dataset with minimal cross-line differences, as these generate significant artifacts in gridded data. The unusual design of the ICECAP data-collection program renders a traditional, iterative line vs tie-line approach [Minty, 1991] difficult to implement. A more rigorous approach was used in which each line was assessed for its fit with the regional model, and for each data intersection was allocated either 0%, 50% or 100% of the required correction to eliminate cross line differences. Naturally, the cross tie was allocated the reciprocal amount. In a few cases, three or more lines intersect almost coincidentally, and for these, the same value was sought for all lines. Lines with no intersections were not levelled, although those with a near miss were checked and modified where required. An additional problem was the extremely dense network of intersections around Casey Station, which caused a large cluster of closely spaced intersections on many lines. It is impossible to completely account for all these on every line, and so we have levelled the data using a tensioned spline along each line, so as to capture the average of these clusters. The levelled line data for each survey were gridded using a minimum curvature approach. 2 km cell size provided the best balance between detail and smoothness, and this value was used throughout. The grids for the ASB, Terre Adelie and smaller areas of 2011-2013 data were merged together in that order, by matching the amplitudes of the second grid to the first. Only a DC amplitude shift was applied. The resulting grid, free from interpretations is shown in Figure 2. Figure 2. Uninterpreted total magnetic intensity grid, 2009/10 through 2012/13 ICECAP data. Gravity Data Processing Careful processing of gravity data is required to avoid misinterpreting trends that may in reality relate to bedtopography or the downwards flexure of the Moho due to the load of the ice sheet. Thus we have used the isostatic residual anomaly for interpretation. The calculation of this anomaly requires three steps, and a good knowledge of the subglacial topography. Figure 3. Free-air anomaly gravity data, 2009/10 to 2012/13 seasons Following initial processing to correct for latitude, instrument drift, elevation, and the Eotvös effect, the free-air anomaly is derived (Figure 3). To isolate the geological signal, the gravity effect of the ice-sheet, the ocean, and their boundaries with bedrock must be removed. Rather than a simple 1D “slab then terrain” approach, we opted for a full 3D approach to resolve these. This involved the construction of a full 3D model of the ice sheet and its bed, as well as the adjacent ocean. 3D Ice sheet/ocean model The model was constructed with three layers – ice (ρ=920 kgm-3), then seawater (ρ=1030 kgm-3), and finally rock (ρ=2670 kgm-3). These layers are continuous across the whole model, but are attributed zero thickness where appropriate. All ICECAP derived surfaces were prepared as 2 km interpolated grids for modelling, and were gridded using kriging. As lidar and radar are essentially 1D measures, no levelling was applied. Where ICECAP data were available, the Earth’s surface was defined by lidar and radar ranges subtracted from the flight elevation (relative to OSU91). Lidar was preferred over radar but was not everywhere available and in places had poor quality due to noise, and radar was used instead in these areas. Outside of the ICECAP area, surface elevations are given by ETOPO1 onshore, and are set to zero offshore. The ice-seawater interface is given by the surface elevation minus the ice thickness. This in most areas is equivalent to the bed elevation on land and the sea surface (i.e. 0) over the ocean. Under some floating ice shelves there is a transitional zone. This was included where ETOPO1 is clearly below the base of the ice. Thus, the bed elevation is given by a combination of radar picks from ICECAP data merged into Bedmap1 onshore and ETOPO1 offshore and beneath floating ice. Topographic and isostatic corrections From this 3D model, the topographic gravity effect was calculated at each data point, and subtracted from the free-air anomaly to give the Bouguer anomaly (Figure 4). The resulting anomaly shows a slight anti-correlation with the bedrock topography (correlation coefficient (rbed) of -0.20), and was not especially sensitive to the density used for the rock layer (r2720 = -0.22; r2620 = -0.18 ). Correlation with the surface elevation showed a strong anti-correlation (rsurf=-0.86). These anti-correlations of topographic data with the Bouguer gravity data are interpreted to represent the isostatic compensation of ice and rock loads. This effect can be accounted for using the isostatic residual anomaly. This correction seeks to remove the effect of depressed crust underneath topographic loads. This depression is usually of a long-wavelength flexural nature, although the large areal extent of the ice-sheet load will favour a near isostatic response. For simplicity, and for comparison with Australian data, the isostatic residual correction uses a local compensation model. Figure 4. Bouguer anomaly gravity data, note the strong southwards decrease in gravity associated with a thickening ice sheet. From the bedrock topography, water thickness and ice thickness layers, we computed a total load for each 2km by 2km column of the model. The ice and seawater in the column were converted to equivalent rock heights for the same load, and were added to the bedrock elevation above the minimum level. This then was converted to a near-isostatic model in Lithoflex software [Braitenberg et al., 2007] by computing flexure with a Te of 1 km (the minimum possible). The base Moho depth was 30 km and standard (default) values were used for Young’s modulus, Poisson’s ratio and crust and mantle densities. The resulting Moho depth varies from 45 to 14 km. The gravity resulting from this surface was computed using a Parker-Oldenburg approach with a density contrast of 0.5, and subtracted from the Bouguer gravity anomaly to yield the isostatic residual anomaly. This is shown, free from interpretations, in Figure 5. Figure 5. Uninterpreted isostatic residual anomaly data References Braitenberg, C., S. Wienecke, J. Ebbing, W. Born, and T. Redfield (2007), Joint Gravity and Isostatic Analysis For Basement Studies - A Novel Tool, EGM 2007 International Workshop, Innovation in EM Grav and Mag Methods: a new perspective for Exploration. Minty, B. R. S. (1991), Simple micro-levelling for aeromagnetic data, Exploration Geophysics, 22, 591-592. Nabighian, M. N., V. J. S. Grauch, R. O. Hansen, T. R. LaFehr, Y. Li, J. W. Peirce, J. D. Phillips, and M. E. Ruder (2005), The historical development of the magnetic method in exploration, Geophysics, 70(6), 33-61. Telford, W. M., L. P. Geldart, and R. E. Sheriff (1990), Applied Geophysics Second Edition, 770 pp., Cambridge University Press. Young, D. A., et al. (2011), A dynamic early East Antarctic Ice Sheet suggested by ice-covered fjord landscapes, Nature, 474(7349), 72-75.