Brehar_et_al_v0

Spatio-temporal Reasoning for Traffic Scene Understanding
Raluca Brehar
1
, Carolina Fortuna
2*
, Dunja Mladenic
2#
, Sergiu Nedevschi
1
1
Computer Science Department, Technical University of Cluj-Napoca,
George Baritiu 26-28, 400027 Cluj-Napoca, Romania
2*
Department of Communication Systems, Jožef Stefan Institute,
2#
Department of Knowledge Technologies, Jožef Stefan Institute,
Jamova 39, 1000 Ljubljana, Slovenia
Email: raluca.brehar@cs.utcluj.ro
Abstract
To be filled…..
1.
Introduction
To be added…..
This paper is structured as follows. Section
2 presents related work. In Section 3 …...
2.
Related work
Raluca?
Carolina?
.
3.
System Architecture
A aaaaa
3.1.
Object detection
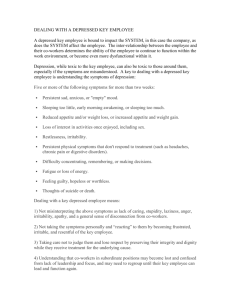
The object detection… zzzz Aaa
Via UTCluj’s algorithms
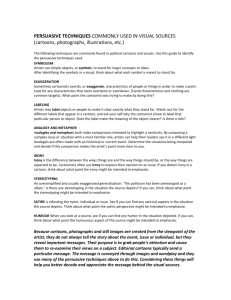
Figure 1 Object detection
Table 1 Output of the object detection algorithm
Object Nr: 2
ObjectCLASS:
Object Nr: 6
ObjectCLASS:
PEDESTRIAN
NearLeftX_m: -4
NearLeftZ_m: 21
NearRightX_m: -3
UNCLASSIFIED
NearLeftX_m: -1
NearLeftZ_m: 20
NearRightX_m:
NearRightZ_m: 21
FarLeftX_m: -4
FarLeftZ_m: 22
FarRightX_m: -3
FarRightZ_m: 22
CenterX_m: -3
CenterY_m: -1
NearRightZ_m:
FarLeftX_m:
FarLeftZ_m:
FarRightX_m:
FarRightZ_m:
CenterX_m: -0
CenterY_m: -0
CenterZ_m: 22
Height_m: 2
Width_m: 9
Length_m: 10
Depth_meters: 21
SpeedX_kmh: 11
SpeedZ_kmh: 15
CenterZ_m: 20
Height_m: 1
Width_m: 1
Length_m: 1
Depth_meters: 20
SpeedX_kmh:
SpeedZ_kmh:
Can the recognition be improved?
By modeling each picture using Cyc we also aim at increasing the classification accuracy of the detected objects.
Raluca, voi detectati si panoul publicitar si gardul, etc.
Acum eu am considerat ca si daca panoul e clasificat ca si pole e ok deoarece are niste picioare care sunt de fapt pole-uri. Tre sa stabilim exact ce consideram clasificare correcta si ce gresita ca sa stim pt evaluare.
Image
Table 2 Video Sequence (Set1)
Recognition
Classification algorithm [classified/ algorithm + Rules and reasoning detected] [true pos/false
A274
A275
A276
A277
A278
A279
A280
A281
A282
A283
A284
A285
A286
A287
A288
2/8
2/9
2/11
4/11
2/9
2/8
3/7
3/8
3/8
0/6
1/6
0/6
1/9
3/12
2/11
3.2.
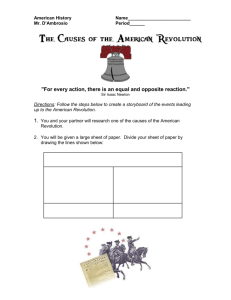
Scene understanding
Description of the image: pos/detected]
4/0/6
3/1/6
3/2/6
4/4/9
4/5/12
5/2/11
4/2/8
4/2/9
5/4/11
5/3/11
5/2/9
3/1/8
4/1/7
3/8
3/8
Image depicts physeriesa000282
Image depicts unclassified0a000282
Image depicts unclassified1a000282
Image depicts pedestrian2a000282
Image depicts unclassified3a000282
Image depicts pole4a000282
Image depicts unclassified5a000282
Image depicts unclassified6a000282
Image depicts unclassified7a000282
Image depicts unclassified8a000282
Image depicts unclassified9a000282
Image depicts unclassified10a000282
Classification of object instances into semantic concepts: pedestrian2a000282 is a person. pole4a000282 is a utility pole. unclassified6a000282 is a utility pole. unclassified7a000282 is a utility pole. unclassified8a000282 is a utility pole. unclassified9a000282 is a utility pole. unclassified10a000282 is a utility pole. unclassified3a000282 is a car.
Inference of belonging to related semantic concepts:
Image depicts unclassified3a000282, is a roadvehicle.
Image depicts unclassified0a000282, is a physicaldevice.
Image depicts unclassified0a000282, is a solidtangibleartifact.
Image depicts unclassified3a000282, is a mechanicaldevice.
Image depicts unclassified3a000282, is a conveyance.
Image depicts unclassified3a000282, is a powereddevice.
Relative positioning:
Image depicts unclassified0a000282, image depicts unclassified1a000282, unclassified0a000282 farFrom unclassified1a000282.
Image depicts unclassified0a000282, image depicts unclassified1a000282, unclassified0a000282 northOf unclassified1a000282.
Image depicts unclassified0a000282, image depicts pedestrian2a000282, unclassified0a000282 eastOf pedestrian2a000282.
Image depicts unclassified1a000282, image depicts pedestrian2a000282, unclassified1a000282 northeastOf pedestrian2a000282.
Image depicts unclassified8a000282, image depicts pole4a000282, unclassified8a000282 farFrom pole4a000282.
Image depicts unclassified8a000282, image depicts unclassified7a000282, unclassified8a000282 near unclassified7a000282.
Image depicts unclassified0a000282, image depicts unclassified9a000282, unclassified0a000282 northOf unclassified9a000282.
Image depicts unclassified1a000282, image depicts unclassified9a000282, unclassified1a000282 northOf unclassified9a000282.
Image depicts pedestrian2a000282, image depicts unclassified9a000282, pedestrian2a000282 farFrom unclassified9a000282.
3.3.
Action recognition
Motion modeling by translation and direction:
Image depicts pedestrian2a000282, moves in direction northwest-generally, speed of object kilometersperhour 17.204650534085253.
Image depicts unclassified3a000282, moves in direction northwest-generally, speed of object kilometersperhour 17.204650534085253.
Image depicts pole4a000282, moves in direction north-generally, speed of object kilometersperhour 0.
Image depicts unclassified5a000282, moves in direction north-generally, speed of object kilometersperhour 0.
Action recognition:
3.4.
English transliteration
Answer and justification of queries:
Image ImageA000282 depicts Spatial Thing? unclassified0a000282 is a utility pole, every utility pole is an open-air, every open-air is a localized spatial thing, every localized spatial thing is a spatial thing. unclassified1a000282 is an obstacle, every obstacle is a tangible thing, every tangible thing is three dimensional thing, all three dimensional thing is a thing with two or more dimensions, every thing with two or more dimensions is a spatial thing with one or more dimensions, every spatial thing with one or more dimensions is a spatial thing. pedestrian2a000282 is a person, everyone is a human, every human is meters - scale object, ?OBJ is a localized spatial thing, every localized spatial thing is a spatial thing. unclassified3a000282 is a car, every car is a device that is not a weapon, every device that is not a weapon is a device, every device is an object with uses, every object with uses is a human-scale object, every human-scale object is a tangible thing, every tangible thing is three dimensional thing, all three dimensional thing is a thing with two or more dimensions, every thing with two or more dimensions is a spatial thing with one or more dimensions, every spatial thing with one or more dimensions is a spatial thing.
Image ImageA000282 depicts ObjectWithUse? unclassified0a000282 is a utility pole, every utility pole is a post, every post is a shaft, every shaft is a rod, every rod is an implement, every implement is a device, every device is an object with uses. unclassified3a000282 is a car, every car is a device that is not a weapon, every device that is not a weapon is a device, every device is an object with uses.
Image ImageA000282
BiologicalLivingObject? depicts
4.
Experimental results
In general, …..
4.1.
Formulating queries
Giving clients the possibility to properly articulate queries about WSs will help them make the right decision. Consider the following QoS-based query:
Find all WSs with availability of at least 90% and response time between 50 and 500 milliseconds. (see
Ошибка! Источник ссылки не найден.
).
5.
Conclusions
We can improve classification of detected objects
We can provide textual description of the contents of the image.
6.
Acknowledgements
Bilateral and PlanetData,..?
7.
References
[1] C. Thompson, “The Netbook Effect: How Cheap Little
Laptops Hit the Big Time”,
Wired Magazine , March
[2]
17th 2009.