LAB 12
advertisement

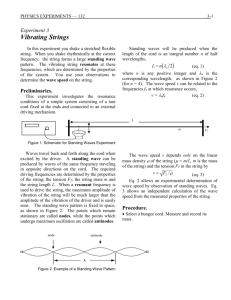
LAB 12 Oscillations and Transverse Waves OBJECTIVES 1. Predict and experimentally verify the period, velocity amplitude and the acceleration amplitude for a spring-mass oscillator. 2. To study the behavior of transverse standing waves on a cord. EQUIPMENT Motion Sensor, spring, string, mass, supports, balance, stopwatch, and meter stick. THEORY 1. Harmonic Oscillator In simple harmonic motion (SHM), the displacement, velocity and acceleration of an oscillator are described x xm cos(t ), v xm sin(t ) and a 2 xm cos(t ) where xm is the position amplitude, φ is the phase constant and the angular frequency is = 2/T = 2f. 2. Standing Waves on a String When a stretched string is plucked it will vibrate in its fundamental mode in a single segment with nodes on each end. If the string is driven at this fundamental frequency, a standing wave is formed. Standing waves also form if the string is driven at any integer multiple of the fundamental frequency. These higher frequencies are called the harmonics. Each segment is equal to half a wavelength. In general, for a given harmonic, the wavelength n or resonant frequencies fn are 2L v n and fn nf0 for n 1, 2, 3,... , n n where L is the length of the stretch string, n is the number of segments in the string and f0 is the lowest resonant frequency or fundamental. The linear mass density μ = √(m/L) of the string can be directly measured by weighing a known length of the string. The linear mass density is the mass of the string per unit length. The linear mass density of the string can also be found by studying the relationship between the tension, frequency, length of the string, and the number of segments in the standing wave. The velocity of any wave is given by v = f where f is the frequency of the wave. The velocity of a wave traveling in a string is dependent on the tension, T, in the string and the linear mass density, µ, of the string: v = √(T/μ). PROCEDURE Part 1A: Measure the Spring Constant k a. Hang a spring from a support rod and clamp, suspend a 50 g weight hanger from it, and measure the initial height of the weight hanger. Add mass in 10 g increments and measure the: x, the additional stretch of the spring resulting from the added weight F, the additional force of the spring to hold the added weight at rest b. Plot the spring force F vs. x and determine the slope to find the spring constant k. Part 1B: Experimentally Verifying the Motion of a Spring-Mass System Use the Motion Sensor to record the motion of a mass on the end of the spring. Determine the period of oscillation, the velocity and acceleration amplitudes. a. Create a Capstone document that displays the position, velocity, and acceleration versus time. Refined the position so that the motion sensor reads zero at the equilibrium point. 12.1 b. Using a support rod and clamp, suspend the spring so that it can move freely upand-down. Put a mass hanger on the end of the spring. Add enough mass to the hanger so that the spring's stretched length is between 6 and 7 times its unloaded length (about 70 grams). c. Place the Motion Sensor on the floor directly beneath the mass hanger. Pull the mass down to stretch the spring and release it. Let it oscillate a few times so the mass hanger will move up-and-down without much side-to-side motion. Begin recording data and continue recording for about 10 seconds. d. Predict the period of oscillation Tthy based on the measured value of the spring constant and the mass. Use the Smart Tool on the position versus time plot to find the average period Texpt over 5 to 10 consecutive peaks. Compare the predicted period Tthy with the measured period Texpt using a percent difference. How do they compare? e. Using the angular frequency and the amplitude, predict the velocity amplitude (vm)thy and acceleration amplitude (am)thy. f. Measure the average velocity amplitude (vm)expt & (am)expt from the v vs. t and a vs. t plots using the Smart Tool. g. Compare the predicted (vm)thy & (am)thy with the measured (vm)expt & (am)expt using a percent difference. How do they compare? Part 2: Standing waves on a bungee cord a. Attach one end of a thin bungee cord to a fixed support, hang the other end over a pulley and suspend a 400 g mass from it. Be sure the mass is supported entirely by the cord. Use a Digital Function Generator to produce a sine wave with a frequency of 40 Hz. b. Move a "fret" along the cord until you get the maximum amplitude fundamental standing wave on the portion of the cord between the driver and fret. Where are the waves reflected in this system, and are the reflection points nodes or antinodes? Sketch the standing wave in your notes and record the following data in columns in a table. The harmonic number of the wave The length of the cord between driver and fret The frequency of the standing wave (that you set in DataStudio) The wavelength of the standing wave The wave speed on the bungee cord (v = f) c. Create other standing wave patterns as described below. For each, add another row of data to your table. Without changing the frequency, move the fret away from the pulley until a second harmonic standing wave is produced. Repeat for a third harmonic wave. Return the fret to the original (fundamental) position and increase the frequency until a second harmonic standing wave is produced. Repeat for a third harmonic wave. Change the driving frequency to 20 Hz and find the new fundamental cord length. Repeat for a driving frequency of 60 Hz. d. Theoretically, the speed of the waves should depend only on the cord density and tension (suspended weight), both of which are fixed in this experiment. Is this what your data show? If so, find the mean and standard deviation of the data in your wave speed column. e. Compare your wave speed results with that predicted by the equation v = √(T/μ), where = 0.0029 kg/m. 12.2