193
advertisement

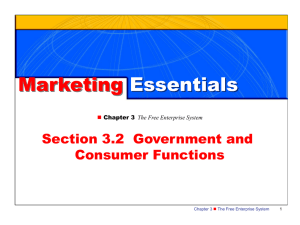
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 00 (2014) 000–000 www.elsevier.com/locate/procedia “APISAT2014”, 2014 Asia-Pacific International Symposium on Aerospace Technology, APISAT2014 Numerical Simulation of Direct Action Liquid Rocket Engines Hydro mechanical Flow Controllers Iana Bakhmet, Zhang Lihui* School of Astronautics, Beijing University of Aeronautics and Astronautics, Beijing, 100191, China Abstract Direct Action Flow Controllers include two main elements: a throttle that provides the required flow changes during the engine operation, and a spool, stabilizing the pressure drop across the throttle. A mathematical model is required to determine the static and dynamic characteristics for a specified design’s parameters. Basis on the mathematical models, were performed numerical factor experiments with constructions of regression models. According to presented mathematical models were performed numerical factor experiments. Presented liquid flow and pressure drop characteristics that depend from the regulator structural factors, when statism coefficient equal to null. The results of mathematical experiments allowed to build regression models that characterizing the degree of the influence of external factors on the design process and the onset of negative droop. Results show what influence has diameter of the spool, the distance between the throttle and the spool, offset of cone throttle, the diameter of the spool, the angle of cone throttle, length of the cone throttle on the flow regulator. The results can be used as guidelines for another flow regulators design. © 2014 The Authors. Published by Elsevier Ltd. Peer-review under responsibility of Chinese Society of Aeronautics and Astronautics (CSAA). Keywords: flow controller, flow regulator, liquid rocket engines, dynamic characteristic, static characteristic 1. Introductioni Liquid Rocket Engine (LRE) hydromechanical flow regulators are one of the most important design elements of the system [1-3]. Flow controllers used for boosters and provide their stable operation and allow vary their thrust by the desired algorithm. The establishment of such controllers usually associated with experimental testing of engines. * Corresponding author. Tel.:+ 86 -18810319445;. E-mail address: bakhmet_yana@mail.ru 1877-7058 © 2014 The Authors. Published by Elsevier Ltd. Peer-review under responsibility of Chinese Society of Aeronautics and Astronautics (CSAA). 2 Iana Bakhmet / Procedia Engineering 00 (2014) 000–000 The increase of the power, traction and armed rocket engine systems leads to increasing of the cost of experimental research and design of flow regulators [4-7]. In this case, the most urgent problem of flow regulator researching become a replacing experimental testing to the numerical experiment. Not a lot of scientific works describe flow regulators construction, but among them we should select works [8-1]. In these papers examined general data of direct action regulators, represented their static and dynamic characteristics and basic equations of the dynamics and static. But materials about the influence of the basic structure parameters on the static and dynamic characteristics are not available. In previous works authors presented impact set of structural parameters through by building graphs. Charts quantity was large enough, charts quantity is large enough, what making difficult to descriptiveness results. To optimize of work had been used regression dependence, which simplifies researching of structural elements influence to the flow controller. 2. Numerical simulation of the flow regulator ii Construction of flow controller are basis on the model that was proposed in the work [2], Figure 1. As a stabilizer used spool, the hydraulic force which is compensated by the piston and the compression spring. The combination of the throttle slide valve parts and provides proportional flow throttle flow area at constant pressure drop [1]. As a basis for design is modeled proposed in [2], Figure 1. Fig. 1. Elements of design. Since the flow regulator is designed to establish the nominal mode of operation of the engine, it has to use stationary mathematical model of the flow regulator, which is characterized by static or load characteristic. The reaction of flow controller to external perturbations is characterized by dynamic properties that display response rate of flow controller to external perturbations. In the above work has been considered the problem of constructing static characteristic flow regulator LRE presented in [2] with the possibility to study the influence of design parameters on its view of the characteristics and analyze the dynamic model of the flow controller. 2.1. Static mode Equations of statics are made for internal elements flow regulator shown in Fig. 1 The basis was chosen model described in [3]. It includes three main equations of continuity and motion. Equation allowed by analogy with [3], to build a static characteristic of a parametric function depending on the flow rate (1) and pressure drop on the displacement of the spool (2). m h FП (1) ДР PПР K ПР h 2F ДР 2 PГД З 2NFз h 2 Iana Bakhmet / Procedia Engineering 00 (2014) 000–000 3 2 m 2 F 2 NF h з ДР (2) - flow through the flow where: FП - working area of the piston; P - pressure difference across the throttle; m control valve; PГД - hydrodynamic force generated by flow around the edge of the spool; PПР - initial mouthfuls Ph ДР 2 DL 2 FL3 З 2 springs; K ПР - spring stiffness; - density of the fluid; h - displacement of the piston from its initial position;; D - inside diameter of the body; L - the distance between the outlet and the throttle valve opening; FL - crosssectional area of fluid flow in the controller; N - the number of spool bores. Model was investigated for three kinds of holes spool: rectangular, triangular, circular. Figure 2 shows the static characteristics of the flow controller with different forms of spool holes. For calculation was used presented in work [2, 3], flow control parameters. Static characteristics are presented in Figure 3 and Figure 4. Were analyzed impacts of the flow controller charactertics on the compression spring, Figure 4, Figure 5. (1 435 N, 2 - 835 N, 3- 1235 N) Calculations showed that the flow controller for the specified design parameters characterized by negative derivative, which characterized by decreasing part of the curve characteristics of the flow, i.e. presence of negative droop. Having negative droop due to the fact that the hydrodynamic forces vary more than the elastic force of the spring, when the movable part of the regulator is moving [1]. Figure 3 and Figure 4 shows that the throttle opening increases fuel consumption, increases the pressure drop across the beginning of the negative droop (moves statism to the right). Fig. 2. Load characteristics of the different types of spool hole Fig. 3. Characteristics of flow controller for different angles of the throttle regulator (α= 10, 30, 50 degree). Figure 5 shows tightening of the spring leads to an increase in flow, pressure drop start negative droop increases (moves statism to the right). 4 Iana Bakhmet / Procedia Engineering 00 (2014) 000–000 Fig. 5. Dependence derivative of the static characteristic on the pressure drop for different mouthfuls spring. Fig. 4. Dependence of the static characteristics for different mouthfuls spring The model allows to make a numerical simulation with selected design parameters with minimal statism of static characteristics. 2.2. Influence of structural parameters on the Flow Controller design Since the flow control valve is a lot of parametric objects, study the effect of various design factors is conveniently carried out by the regression model, the numerical coefficients which characterize the effect of factors on the parameters of the controller. Basic design factors selected to determine their impact on the work flow regulator shown in Figure 1. In a preliminary experiment it was determined that L hasn’t significantly affect to the flow regulator. Because in the model [5] the distance L , determines pressure losses of liquid friction to the flow controller body. Table 1. Levels of factors variation. Factor xd , mm Ds ,mm ,degree Ld ,mm k , N/m Tspr , N Definition x1 x2 x3 x4 x5 x6 Main Level 1,25 52,5 27,5 35 150 60 In the second phase of the study were selected only 6 parameters without the factor L . Changing of each parameters was 30% from baseline, Table 1. During the work has been built up the plan of full factorial experiment 26, which contained of 64 different experiences. Calculated responses were processed by the conventional method of treatment factorial experiment [4]. For all experiments, as a response data were determined: , kg/s − fluid flow through the flow controller when droop factor equivalent null PG . Definition - ym . 1. m For fuel consumption in coded values factors, with accounting the influence of confounding factors, derived model has the form (3): ym 0,388 0,227 x1 0,052 x2 0,003586 x3 0,0003797 x4 0,027 x5 0,08x6 0,03x1 x2 0,002211x1 x3 0,0006141x1 x4 0,012 x1 x5 0,05x1 x6 (3) Iana Bakhmet / Procedia Engineering 00 (2014) 000–000 5 2. P , Pa − pressure drop when statism coefficient equivalent to zero. Definition - y P . For the pressure drop in the coded values factors, model has the form (4): y P 4,629 1,577 x1 0,344 x2 0,16 x3 0,238x4 1,972 x5 0,526 x6 0,056 x1 x2 0,207 x1 x3 0,111x1 x4 0,731x1 x5 0,025x1 x6 . (4) As a result of the models construction has been determined: 1. Linear model of calculation without the influence of joint factors characterized by 7% relative error. Accounting of mixed factors improves the accuracy to 1.9% relative error. 2. The linear model of differential pressure, excluding the effect of joint factors characterized by a relative 11.7% error. Accounting for confounding factors improves the accuracy to 9.8% relative error. It is possible that this accuracy is not satisfactory for the model and its need to be count like pressure drop model of the second-order. Obtained results: 1. The largest influence on the output values aside increases have offset cone throttle. 2. The spring stiffness has larger influence on the pressure drop than in the fuel consumption. 3. Cone throttle has little effect on the pressure drop (0.53%) and on the fuel consumption (0.65%). 4. The largest influence on the output values in the decreasing length of the cone throttle. The least impact on the pressure drop has with combined effect of: xd - Tspr , xd - Ds , xd - Ld . 2.3. Dynamics characteristic of the flow regulator The model took into account the reduced mass in the flow controller (mass of the spool and fluid displacement): 2 2 F2 the reduced friction: F2 RПР RЗОЛ 8 LОТВ FОТВ FОТВ Equations represent a system of differential equations of first order form (5-9): dm ДР g F ДР ДР P P m 2ДР ВХ 1 2 dt L ДР 2g F ДР M ПР M З FОТВ LОТВ (5) рр g FЗ h dm З 2рр P1 PВЫХ m 2 dt LЗ g 2 Fз h (6) dh H dt dP1 dt dH dt (7) V m ДР F2 H m pp a2 g F2 FОТВ F1 PВХ 2 M З FОТВ LОТВ (8) F2 P1 PПР RЗ 8 LОТВ F ОТВ 2 H (9) K ПР h LКР h del P1 PВЫХ ДР =0,6 kg/s, h = 0,4 cm, P1 = 200 kg/cm2, m З =0,6 kg/s, H =0. Initial values has been taken: m System of differential equations was solved by method of Runge-Kutta, through the procedure: rkfixed (y, x1, x2, intvls, D) in Mathcad software. System solution allowed to determine the dynamics of the flow controller in the beginning of work. The controller output to the stationary mode occurred on 0.02 s. Stationary mode determined by the fact that the expenditures through the throttle and valve becomes equal, Figure 6, and the spool stops, Figure 7. 6 Iana Bakhmet / Procedia Engineering 00 (2014) 000–000 Fig. 6. Changing the flow rate through the throttle and valve, and at the beginning of work. Fig. 7. Changing of the spool hole opening at the beginning of work. 4. Conclusions Results of the static and dynamic characteristics allow the design phase to obtain advice on the right choice of parameters and structural elements of calculated flow regulator. Was determined that the static flow control characteristics are weakly dependence on the regulator inlet pressure. The results demonstrated that the dynamic characteristics are aperiodic. Examining the behaviour of the flow regulator for different geometries of the spool hole is determined that the most successful form it is triangle, which move the negative droop to the right. The behaviour of the flow controller for circular and rectangular holes do hasn’t significant differences. References [1] Glikman B.F., Automatic control of liquid propellant rocket engines/ M.: Mechanical Engineering, 1989. – 296 pp. [2] Belyaev E. N., Chvanov V.K., Chervakov V.V., Mathematical modeling workflow liquid rocket engines /– M.: MAU, 1999.- 228 pp. [3] Lebedinskii E.V., Zaitsev B.V., Sobolev A.A., Multi-level mathematical modeling of flow control LRE // GNC FGUP « Keldish Center ». [4] Egorov A.E., Azarov G.N., Koval A.V., Investigation of devices and automation systems using experimental design / KHNU, 1986.- 240pp. [5] Bakhmet I. G., Construction of the flow characteristics of the flow regulator LRE , AET. - 2013. - № 10 (107) – pp. 136-140. [6] George P. Sutton , History of Liquid-Propellant Rocket Engines in Russia, Formerly the Soviet , Journal of Propulsion and power, Vol. 19, No. 6, Noveber–December 2003 Union Los Angeles, California, 90049. [7] Dieter K. Huzel and David H. Huang, Design of Liquid Propellant Rocket Engines Scientific and Technical Information Division, Office of Technology Utilization 1967, National Aerospace Aeronautics and Space Administration, Washington, D.C. [8] Sutton, George Paul, Rocket propulsion elements: an introduction to the engineering of rockets, by George P. Sutton, Oscar Biblarz.--7th ed. p. cm. I SBN 0-471-32642-9. [9] Liu Yongfeng, Pei Pucheng, Numerical simulation of direct injection gasoline engine model [A], Tsinghua University, Beijing, China. [10] Holster Jesse L.Analytical Model for Liquid Rocket Propellant Feedline Dynamics[J].Journal of Spacecraft,1973,11(3):180187pp. [11] Huang Yuhui , Wang Zhenguo , ZhouJin, Nonlinear theory of combustion stability in liquid rocketengine based on chemistry dynamics, National University of Defense Technology, Changsha, Vo l . 4 5 No.4, SCIENCE IN CHINA(Series B) August 2002.. [12] V. Ahuja, A. Hosangadi, and P.A. Cavallo, Combustion Research and Flow Technology, Analyses Of Transient Events In Complex Valve and Feed Systems, 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit10 - 13 July 2005, Tucson, Arizona, AIAA 20054549. [13] Francis H Harlow, Anthony A Amsden, , DOI: .1016/0021-9991(71)90002-7. Iana Bakhmet / Procedia Engineering 00 (2014) 000–000 7