Inverse Z-transform
advertisement

Experiment # 10
Z-TRANSFORM
In mathematics and signal processing, the Z-transform converts a discrete time-domain signal,
which is a sequence of real or complex numbers, into a complex frequency-domain
representation.
It can be considered as a discrete equivalent of the Laplace transform.
The Z-transform, like many integral transforms, can be defined as either a one-sided or two-sided
transform.
Bilateral Z-transform
The bilateral or two-sided Z-transform of a discrete-time signal x[n] is the function X(z) defined
as
where n is an integer and z is, in general, a complex number.
Unilateral Z-transform
Alternatively, in cases where x[n] is defined only for n ≥ 0, the single-sided or unilateral Ztransform is defined as
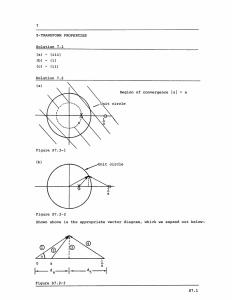
Inverse Z-transform
The inverse Z-transform is
where
is a counterclockwise closed path encircling the origin and entirely in the region of
convergence (ROC). The contour or path,
, must encircle all of the poles of
.
Commands in Matlab:
ZTRANS(f): is the Z-transform of the scalar sym f with default independent variable n. The
default return is a function of z.
IZTRANS(F): is the inverse Z-transform of the scalar sym F with default independent variable z.
The default return is a function of n.
Lab Work:
1. Find the z-transform of :
𝒖[𝒏]
𝒏 𝒖[𝒏]
𝒆−𝒂𝒏𝑻 𝒖[𝒏]
𝒄𝒐𝒔𝜷𝒏 𝒖[𝒏]
a=sym('1');
y=ztrans(a)
y=
z/(z-1)
//////////////////////////////////////
syms n
y=ztrans(n)
y=
z/(z-1)^2
//////////////////////////////////////
syms n
y=ztrans(n^2)
y=
z*(z+1)/(z-1)^3
////////////////////////////////////
syms n a T
y=ztrans(exp(-a*n*T))
y=
z/exp(-a*T)/(z/exp(-a*T)-1)
//////////////////////////////////////
syms n b
y=ztrans(cos(b*n)
y=
(z-cos(b))*z/(z^2-2*z*cos(b)+1)
2. Find the inverse z-transform of:
𝑧
𝑧−𝑎
𝑧(2𝑧−1)
(𝑧−1)(𝑧+0.5)
syms z
y=iztrans(z*(2*z-1)/((z-1).*(z+.5)))
y=
4/3*(-1/2)^n+2/3
////////////////////////////////////////
syms z a
y=iztrans(z/(z-a))
y=
a^n
Other useful commands:
1. ZPK(Z,P,K,Ts): creates a discrete-time ZPK model with sample time Ts.
2. TF(NUM,DEN,TS): creates a discrete-time transfer function with sample time
TS.
3. C2D(SYSC,Ts) converts the continuous-time LTI model SYSC to a discretetime model SYSD with sample time Ts.
4. D2C(SYSD) produces a continuous-time model SYSC that is equivalent to the
discrete-time LTI model SYSD.
n=[1 -.5];
d=[1 -0.5 -.5];
sys=tf(n,d,.1)
Transfer function:
z - 0.5
----------------z^2 - 0.5 z - 0.5
Sampling time: 0.1
sys1=zpk(sys)
Zero/pole/gain:
(z-0.5)
------------(z-1) (z+0.5)
Sampling time: 0.1
////////////////////////////////////
z=0.5;
p=[-0.5 1];
k=1;
zpk(z,p,k,0.1)
Zero/pole/gain:
(z-0.5)
------------(z+0.5) (z-1)
Sampling time: 0.1
Finding response of a system:
If a system
is driven by a signal
the inverse Z-transform the output
Example:
then the output is
can be found.
. By taking
A discrete time system is described by the following transfer function:
𝑧 + 0.32
2
𝑧 + 𝑧 + 0.16
Find the system response to input 𝑥[𝑛] = (−2)−𝑛 𝑢[𝑛] if all initial conditions are zero.
syms n z
x=(-2).^-n;
x=simplify(ztrans(x))
x=
2*z/(2*z+1)
h=(z+.32)/(z^2+z+.16)
h=
(z+8/25)/(z^2+z+4/25)
y=x.*h
y=
2*z/(2*z+1)*(z+8/25)/(z^2+z+4/25)
yn=iztrans(y)
yn =
2*(-1/2)^n+2/3*(-1/5)^n-8/3*(-4/5)^n
Exercises:
1. Find the z-transform of :
𝒔𝒊𝒏𝜷𝒏 𝒖[𝒏]
2.Find the inverse z-transform of:
𝒛(𝒛 − 𝟒)
− 𝟓𝒛 + 𝟔
𝒛𝟐
3.A discrete time system is described by the following transfer function:
𝒛−. 𝟓
(𝒛+. 𝟓)(𝒛 − 𝟏)
Find the system response to input 𝒙[𝒏] = 𝟑−(𝒏+𝟏) 𝒖[𝒏] if all initial conditions are zero.