The z-Transform
advertisement

The z-Transform
The representation for a sampled function was
shown to be
xs (t )
x[n] (t nT ).
n
Taking the Laplace transform of this function we
have
X s (s)
x[n]e
n
snT
.
If we let z=esT, we have
X s ( s)
x[n]z
n
X ( z ).
n
The samples in the sum are multiplied by z-n. Each
factor z-n corresponds to a factor of e-snT in Laplace
domain. Multiplying by e-snT in Laplace domain
corresponds to a delay in time domain:
e snT X ( s ) e snT e st x(t ) dt
0
e s (t nT ) x(t ) dt e su x(u nT ) du
Lx(t nT ).
Here, the bilateral Laplace tranformation is used.
Example: Find the z-transform of the discrete-time
step function
1 (n 0),
x[n] u[n]
0 (n 0).
u[n]
n
1 2 3 4 5
By simply inserting this discrete-time function into
the definition of the z-transform,
X ( z)
x[n]z
n
.
n
we have
X ( z)
u[n]z
n
z .
n 0
n
n
To evaluate this sum, we use the formula for an
infinite geometric series:
1
a
.
1 a
n 0
n
This summation converges to the above expression
if |a|<1. A derivation of this expression is on the
following slide.
N
SN a .
n
n 0
S N 1 S N a
N 1
S N [1 a ] 1 a
N 1
1 aS N .
N 1
1 a
SN
.
1 a
1 0
1
S
.
1 a 1 a
.
Using the formula for the infinite geometric series
the z-transform of the unit step function is
X ( z) z
n
n 0
1
.
1
1 z
The convergence criterion is
| z 1 | 1,
or,
| z | 1.
Since z is a complex number, this last statement is
equivalent to those values of z whose magnitude is
greater than one:
z r zi 1 ,
2
2
or,
zr zi 1.
2
2
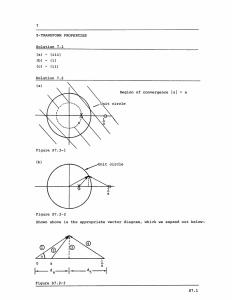
The region
zr zi 1
2
2
corresponds to a circle in the complex plane. (zr is
like x and zi is like y.) Thus, the region
zr zi 1
2
2
is the region exterior to the unit circle.
Im{z}
zr zi 1
2
2
Re{z}
Im{z}
zr zi 1
2
2
Re{z}
Example: Find the z-transform of
1 ( n 0).
x[n] u[n 1]
0 (n 0).
-u[-n-1]
-3 -2 -1
n
1 2 3 4 5
In this case, we have an anticausal function. Strictly
speaking, it is impossible to generate this function,
but it may arise as a solution to a design. Such
functions correspond to nonrealizable systems.
The z-transform of this function will be a sum like the
z-transform for the step function, but the index will
be negative:
1
X ( z) z
n
n
z
n 1
n
1
1
1 z
1 1 z
1 z
z
1 z
z
z 1
1
.
1
1 z
We see that the z-transform of the anticausal step
function is the same as that of the ordinary step
function. This z-transform converges for |z|<1 (look
at the last summation before the geometric series
formula is applied).
The region |z|<1 corresponds to
zr zi 1.
2
2
Im{z}
zr zi 1
2
2
Re{z}
Example: Find the z-transform of a discrete-time
exponential function
n
a
n
x[n] a u[n]
0
(n 0),
(n 0),
where |a| < 1.
anu[n]
n
1 2 3 4 5
To find the z-transform, we proceed in much the
same fashion as we did before:
X ( z) a z
n
n
n 0
az
1 n
n 0
1
.
1
1 az
The region of convergence is |az-1 | < 1, or |z|>a.
Notice that the regions of convergence do not
contain any of the poles of the z-transform. The
poles are where the denominator is zero. For the
unit step function z-transform, the pole was at z=1.
For anun, the pole is at z=a. Poles are marked with
an ‘x’.
Im{z}
zr zi a 2
2
zr zi a 2
2
2
2
Re{z}
zr zi 1
2
2
Example: Find the z-transform of a discrete-time
ramp function
n (n 0),
x[n] r[n] nu[n]
0 (n 0).
r[n]
n
1 2 3 4 5
The first step in finding this z-transform is the same
as with other z-transforms:
X ( z ) nz .
n
n 0
To proceed from here, we need to use a small trick:
d
1
z
1
dz
n
n z
1 n 1
nz
n 1
.
The last expression is the term inside the sum of the
z-transform of the ramp multiplied by z. So if we
multiply the transform by z-1z, we have
X ( z) z
1
nz
n 1
n 0
d
1
z 1 z
n 0 dz
1
n
d
1
1
z
z
1
dz n 0
1
1 d
z
1
1
dz 1 z
1
1
z
.
2
1
1 z
n
The region of convergence is the same as that for
the unit step function: |z|>1.
Example: Find the z-transform of a discrete-time
impulse function
1 (n 0),
x[n] [n]
0 (n 0).
[n]
n
-2 -1
1
2
3
When evaluating the z-transform for this function, we
see that only the n=0 term is non-zero
X ( z) z
0
1.
A summary of the z-transforms of the causal signals
is shown in the table on the following slide.
x[n ]
X (z )
[n]
1
u[n ]
n
a u[n]
r[n]
1
1 z 1
1
1 az 1
z 1
1 z
1 2
There are certain general characteristics that apply
to all z-transforms. For example, if we multiply a ztransform by z-1, we achieve a delay in time-domain:
1
z X ( z) z
1
x[n]z
n
n
( n 1)
x
[
n
]
z
n
n
x
[
n
1
]
z
.
n
(In the last step, we substituted n-1 for n.)
So,
Z{x[n 1]} z
1
X ( z ).
This property is perhaps the most important property
of z-transforms.
In (continuous-time) linear system theory, we
described the input/output relationship of a system
by the following diagram:
x(t )
* h (t )
L
X (s )
y (t )
L
H (s )
Y (s )
-1
We can find the output y(t) from the input x(t) by
either using convolution with the impulse response
or by multiplication by the transfer function in
Laplace domain. Does a similar diagram exist for
discrete-time functions?
x[n ]
* h[n]
Z
y[n]
Z
X (z )
H (z )
Y (z )
-1
To see if such relationships exist, let’s look at the
bottom half of this diagram where we multiply X(z)
by H(z) to get Y(z).
Y ( z ) H ( z ) X ( z ).
By applying the definition of the z-transform, we can
see what the equivalent (discrete-) time relationship
would be.
Y ( z) H ( z) X ( z)
h[n]z x[m]z
n
n
m
m
h[n]x[m]z
( n m )
n m
h[n m]x[m]z
n
n m
In the last step, we substituted n with n-m.
Since
Y ( z)
y[n]z
n
,
n
we must necessarily have
y[n]
x[m]h[n m].
m
This last expression is that of a discrete-time
convolution:
y[n] x[n] * h[n]
x[m]h[n m].
m
Example: Find the discrete-time convolution of the
following two functions:
x[n]
2
1
n
-2 -1
h[n]
1
2
3
4
1
n
-2 -1
1
2
3
4
We start by evaluating the terms in the summation:
x[m] and h[n-m] for various values of n.
x[m]
2
1
m
-2 -1
h[-m]
1
2
3
4
n=0
1
m
-2 -1
1
2
3
4
h[1-m]
n=1
1
m
-2 -1
h[2-m]
1
2
3
4
n=2
1
m
-2 -1
h[3-m]
1
2
3
4
n=3
1
m
-2 -1
1
2
3
4
We then find the sum of the products of the two
functions.
x[m]
2
1
m
-2 -1
h[-m]
1
2
3
4
n=0
1
m
-2 -1
1
2
3
4
The values marked in red indicate values in both
functions whose product is not zero. Non-red values
will have a zero product. So from the red values we
have
y[0] x[m]h[m] (1)(1) 1.
Proceeding for n=1,2,…, we have
n=1
x[m]
2
1
m
-2 -1
h[1-m]
1
2
3
4
1
m
-2 -1
1
2
3
4
y[1] x[m]h[1 m] (1)(1) (2)(1) 3.
n=2
x[m]
2
1
m
-2 -1
h[2-m]
1
2
3
4
1
m
-2 -1
1
2
3
4
y[2] x[m]h[2 m] (2)(1) (1)(1) 3.
n=3
x[m]
2
1
m
-2 -1
h[3-m]
1
2
3
4
1
m
-2 -1
1
2
3
4
y[3] x[m]h[3 m] (1)(1) 1.
So we have the following values for y[n]:
1
3
y[n]
3
1
(n 0),
(n 1),
(n 2),
(n 3).
The values for y[n] are zero for other values of n
(n<0, n>3).
y[n]
3
2
1
n
-2 -1
1
2
3
4
The same result could have been achieved using ztransforms:
1
2
X ( z) 1 2z z .
1
H ( z) 1 z .
Y ( z) X ( z)H ( z)
1
1 2z z
1
2
1 z
2
1
3
1 3z 3z z .
Taking the inverse z-transform, we have
y[n] [n] 3 [n 1] 3 [n 2] [n 3].
In MATLAB, we carry out the calculations for the
previous example using the conv and filt functions:
>> x = [1 2 1];
>> h = [1 1];
>> y = conv(x,h)
y =
1
3
3
1
>>X = filt(x,1)
Transfer function:
1 + 2 z^-1 + z^-2
>>H = filt(h,1)
Transfer function:
1 + z^-1
>>Y = X*H
Transfer function:
1 + 3 z^-1 + 3 z^-2 + z^-3
We can also plot the functions as follows:
>> plot(0:2,x,'or')
>> axis([-1 4 -1 4])
>> plot(0:1,h,'ob')
>> axis([-1 4 -1 4])
>> plot(0:3,y,'om')
>> axis([-1 4 -1 4])
The plots are shown on the following pages.
Input
4
3
xn
2
1
0
-1
-1
0
1
2
n
3
4
Impulse Response
4
3
hn
2
1
0
-1
-1
0
1
2
n
3
4
Output
4
3
yn
2
1
0
-1
-1
0
1
2
n
3
4